
RFID 系统中基于中继传感器的协同防碰撞算法*
2015-04-01 12:19:56孙晓玲李伟勤
传感器与微系统 2015年12期
孙晓玲,郑 勉,李伟勤
(西南石油大学 电气信息学院,四川 成都610500)
0 引 言
射频识别(radio frequency identification,RFID)系统[1]中,影响数据传输完整性的重要因素是多个应答器同时竞争无线信道导致阅读器无法确认数据来源发生数据碰撞[2]。因此,多应答器进入多阅读器探测范围内时,需要通过识别正确信号消除其它信号干扰,为阅读器与应答器之间建立正确、稳定和可靠的通信[3],成为RFID 系统应用中的关键问题。
Fyhn K 等人[4]在多个阅读器会话过程中,基于实际的树防冲突协议集成和可靠的标记算法提高标记的概率估计的可靠性。文献[5]结合影响RFID 系统识别率的关键因子,得出了标签与阅读器平面夹角、读写器天线数量、标签与读写器距离等关键参数。文献[6]优化了搜索效率从而降低了系统空闲率。文献[7]提出了轮胎嵌入式超高频无源RFID 系统功率传递模型。
针对RFID 系统中的多阅读器与数据碰撞带来的多应用、多样性服务等问题,提出了一种适用于RFID 系统的基于中继传感器的协同防碰撞机制,主要包括:1)设计了一种避免数据碰撞的中继传感器;2)为了实现RFID 系统中继传感器协同合作设计了传感器外围电路;3)基于系统工作区异类辐射元的信号,通过中继传感器汇聚,提出了协同防碰撞算法。
1 RFID 系统中继传感器
传统RFID 系统包括:应答器、阅读器和多样性高层应用。对于复杂的多样性应用中经常出现多阅读器、多应答器之间的数据通信,数据碰撞问题严重,导致应答器识别效率和准确度下降。
假设RFID 系统中,数据发生碰撞概率为Pt,可以分为以下三种情形:
1)同一应答器与多阅读器之间的数据碰撞,概率记为Pc1;
2)同一阅读器与多个应答器之间的数据碰撞,概率记为Pc2;
3)n 个阅读器与m 个应答器之间的数据碰撞,概率记为Pc3。
因此,RFID 系统的数据碰撞从概率分布角度具有式(1)所示关系

因数据碰撞导致电磁场状态变化带来的电感耦合产生的电流,对系统数据通信产生干扰,干扰权重λ 可由式(2)计算得到

其中,S 为碰撞检测面积,d0为有效通信距离,β 为磁感强度,特别是第三种数据碰撞发生后对系统信号识别和定位产生影响,测量分布情况如图1 所示。
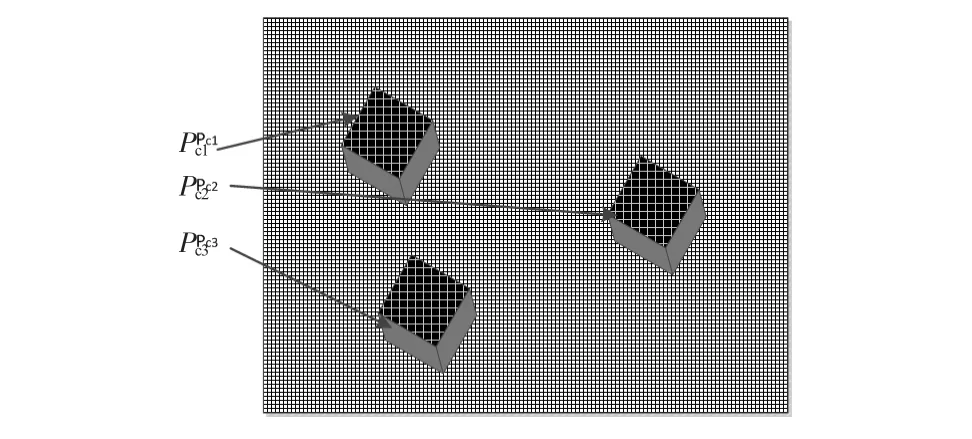
图1 数据碰撞效应测量分布Fig 1 Measurement distribution of data collision effect
为了消除图2 所示的碰撞效应,对传统RFID 系统进行扩展,将图1 所示架构增强为图3 所示,协同RFID 系统为协同应答器、协同阅读器和中继节点。
图2 所示的协同RFID 系统中数据碰撞概率分布满足泊松特性如式(3)所示

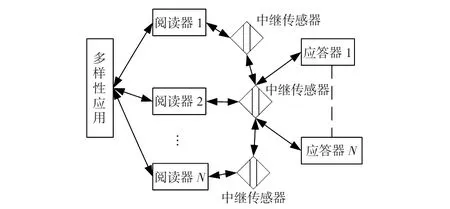
图2 协同RFID 系统架构Fig 2 Collaborative RFID system architecture

其中,p 为协同合作处理后数据碰撞平均概率。
通过一组中继传感器为应答器组合阅读器组之间提供高效和可靠的数据识别和信标定位,预防数据碰撞,该中继传感器必须具有与应答器、阅读器之间建立无线通信的天线电路和具有协同处理功能的微控器,传感器头结构如图3所示。
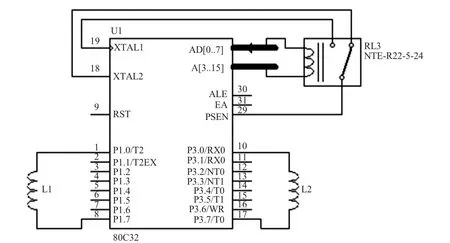
图3 中继传感器头结构Fig 3 Structure of relay sensor probe
使用图3 所设计的中继传感器,通过传感器、应答器和阅读器之间的协同合作,可以对图2 所示的数据碰撞效应测量分布优化改进。
2 协同防碰撞算法
基于1 节中设计的图3 所示中继传感器头结构,图4给出了其外围电路结构,选用元件包括:16 位80C51 微处理器、CONN—D15F 连接器等。其中,15 位引脚连接器与微处理器的A0 ~A14 连接,A16 为空闲位。
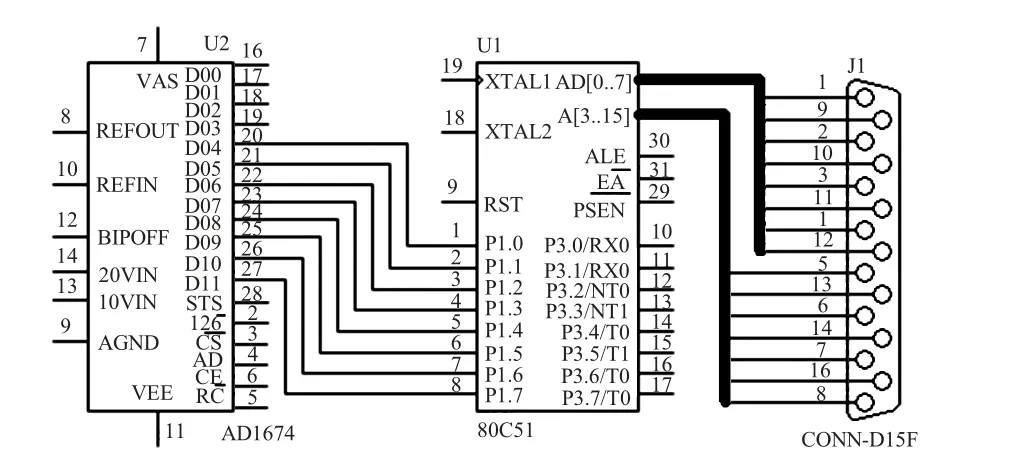
图4 中继传感器结构Fig 4 Structure of relay sensor
加入中继传感器节点的RFID 系统的辐射元包括三类:电流元、磁感元和感知元。由它们构成的电磁场覆盖的空间具有式(5)所示的关系
其中,I,Φ,S 分别为电流元、磁感元和感知元获取信号强度,n 为线圈匝数,ω 为系统工作角频率,θ 为中继传感器感知点与天线线圈原点夹角弧度,H1为磁场强对电流影响系数,H2为中继传感器感知信号对磁场强影响系数。
在上述三元辐射覆盖的电磁场中,异构信号传输循环流程如图5 所示。其中,上电过程时为无源应答器通过磁感耦合从阅读器获得电压和中继传感器电池为微处理器与数据发射前端供电的过程。初始化工作包括:阅读器发送检测信号寻找功能区域内所有应答器、应答器回复阅读器响应和中继传感器干涉多应答器与多阅读器的碰撞感知。具体信号包括应答器信号、中继信号和汇总信号。
图5 中继传感器与应答器端电压循环传输Fig 5 Voltage loop transmission of relay sensor and transponder terminal
基于中继传感器的协同防碰撞算法流程为:
1)多阅读器、多应答器和中继传感器上电;
2)初始化阅读器和应答器芯片,以及中继传感器微处理器和外围电路;
3)多阅读器的请求命令帧和多应答器的响应命令帧汇聚至中继传感器节点;
4)中继传感器节点之间协同合作,利用式(1)~式(3)获得协同合作增益;
5)根据式(4)~式(6)获得系统汇总信号;
6)阅读器根据式(7)得到防碰撞后由中继传感器发送来的正确应答器响应数据。
3 实验验证
为了对比和分析所提防碰撞算法与无中继传感器的RFID 系统的ALOHA 防碰撞算法的性能表现,实验环境布设情况如下:
1)在100 m×80 m 的举行区域内部署10 个同类应用阅读器;
2)部署50 个同类应用应答器;
3)部署5 个中继传感器,其参数设置:输出电流为10~20 mA,工作距离为10~20 m,发射率为0.1~1.1,负载电阻为50 kΩ。
第一组实验中,设定应答器回复阅读器响应帧的个数从10 开始,以步长为10 递增至50,统计测量阅读器通过中继传感器读取的时隙数,结果如图6 所示。结果表明:传统的ALOHA 防碰撞算法随着系统中应答器个数的增加,阅读器所需的读取时隙数迅速增加,而所提算法因为在应答器和阅读器之间加入了中继传感器从而降低了防碰撞所占用的系统资源,有效减少了所需读取时隙。

图6 读取时隙数Fig 6 Read time slot number
第二组实验,控制RFID 系统中发送的数据帧个数从1开始,以5 个帧为步长逐步递增至30 个。统计测量数据帧从应答器到阅读器的传输时延,结果如图7 所示。结果发现,两种防碰撞算法在数据帧规模从1 增大到15 之间,时延变化趋势相同,所提算法时延明显比ALOHA 算法短。特别是当数据帧个数达到20 后,传统ALOHA 算法的时延突然迅速增加,而所提算法依然保持平稳趋势,这主要得益于中继传感器的协同合作防碰撞算法,通过汇总来自阅读器、应答器和中继传感器的信号,由中继传感器协同处理后正确到达阅读器或应答器,为其通信提供可靠保障。
图7 传输时延Fig 7 Transmission delay
4 结束语
本文研究了一种适用于多阅读器应答器系统的基于中继传感器的协同防碰撞算法。首先将系统发生数据碰撞分为三种情形,根据数据碰撞角度和碰撞效应,设计一种可以避免数据碰撞的中继传感器结构,然后为了实现多中继传感器节点之间进行协同合作设计了外围电路结构,最后结合三类辐射元的信号汇聚提出了中继传感器协同防碰撞算法。实验结果表明:所提的基于中继传感器的协同防碰撞算法与传统的ALOHA 算法相比,在读取时隙和传输时延等方面具有明显优势。
[1] 王建伟,赵玉萍,Timo Korhonen.RFID 系统防碰撞协议研究—设计与优化[J].电子与信息学报,2009,31(1):1-4.
[2] 谢胜眉,赵军辉.基于最优化原理的RFID 系统中的ALOHA防碰撞算法研究[J].电路与系统学报,2009,14(4):8-12.
[3] 刘建华,童维勤.RFID 系统中面向服务的动态资源配置优化机制[J].通信学报.2012,33(8):93-105.
[4] Fyhn K,Jacobsen R M,Popovski P.Fast capture-recapture approach for mitigating the problem of missing RFID tags[J].IEEE Transactions on Mobile Computing,2012,11(3):518-528.
[5] 刘亚丽,胡圣波,鄢富玉.嵌入式RFID 系统识别率关键因子的分析[J].工程设计学报,2012,19(6):479-484.
[6] 郭荣佐,张 涛,黄 君.RFID 系统8—4—2 动态多叉树防碰撞算法设计与分析[J].重庆师范大学学报:自然科学版,2013(6):118-122.
[7] 胡圣波,司 兵,舒 恒.轮胎嵌入式超高频无源RFID 系统的功率传递特性[J].农业工程学报,2013,29(21):150-158.
猜你喜欢
电子设计工程(2022年15期)2022-08-17 10:07:04
铁道通信信号(2020年9期)2020-02-06 09:15:22
东北师大学报(自然科学版)(2018年3期)2018-09-21 09:06:36
电信科学(2017年6期)2017-07-01 15:44:35
铁道通信信号(2016年4期)2016-06-01 12:10:19
航天器工程(2015年3期)2015-10-28 03:35:28
现代计算机(2015年17期)2015-09-26 02:01:54
电子设计工程(2015年16期)2015-02-27 12:07:46
城市轨道交通研究(2015年11期)2015-02-27 11:02:50
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:20
