
线性菲涅尔单轴跟踪系统的设计与实现
2015-04-01 01:02欧阳海玉贾廷纲牛玉刚
自动化仪表 2015年12期
欧阳海玉 贾廷纲 牛玉刚
(华东理工大学化工过程先进控制和优化技术教育部重点实验室1,上海 200237;上海电气集团股份有限公司自动化事业部2,上海 200070)
0 引言
随着人们对能源的需求不断提高,世界正面临两大难题:一是以煤和石油为代表的传统能源储量有限,二是传统能源对环境的影响[1],使人类的生存受到了严重的威胁,人们开始开发和利用绿色可再生能源。太阳能作为一种绿色的可再生新能源开始受到广泛关注。大规模聚光型太阳能热发电主要原理是利用太阳辐射所产生的热能发电。聚光型太阳能热发电中,聚光系统是必不可少的,目前聚光热发电系统主要有塔式、碟式、槽式和线性菲涅尔等[2-5]。射角度也会相应地发生变化,镜场中镜元反射的光线不能照射到吸收器上,因此LFR 聚光系统需要采用单轴跟踪,才能使每一镜元都能将太阳光线反射到固定的吸收器上[6]。对此一些研究人员设计了基于PLC[7]和基于单片机[8]的太阳能单轴跟踪系统。但PLC 的价格昂贵,而单片机在控制算法的实现以及通信能力等方面存在一定的限制,所以本文设计了基于数字信号处理器(DSP)的线性菲涅尔单轴太阳跟踪系统,并已进入试用阶段。该系统既能实时快速地处理信号,又便于扩展,容易实现闭环精准控制,使线性菲涅尔镜场中镜元实时跟踪太阳,并始终将太阳光线反射到吸收器上。
1 线性菲涅尔反射装置
线性菲涅尔反射装置(linear Fresnel reflector,LFR)如图1 所示,LFR 镜场由若干个平面或微弧面反射镜组成,吸收器固定安装在镜场中央上方高度为H的位置。LFR 工作时,反射镜将太阳光线反射到镜场上方的吸收器上,吸收器吸收镜场聚集的太阳光线辐射用来发电。随着太阳自东向西的运动,太阳光线入
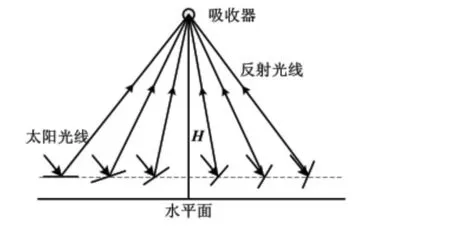
图1 LFR 线性菲涅尔系统示意图Fig.1 Schematic diagram of linear Fresnel system
2 系统硬件设计
在众多DSP 系列中,TMS320C2000 系列数字信号处理器具有良好的控制和信号处理能力,能快速而准确地处理采样得到的电压和电流信号,以实现复杂的控制算法。本文设计的跟踪系统选用TMS320F2812作为核心控制芯片,它具有体积小、价格低,同时具有事件管理能力和嵌入式控制功能。
图2 为以DSP2812 为核心的跟踪系统功能框图。核心控制芯片DSP2812 完成对信号的处理和追日算法的实现,对直流电机进行位置闭环控制,控制信号经由功率驱动电路驱动电机正反转,实现对太阳的跟踪控制。控制器还可以通过RS-232 与上位机进行异步通信,实时监测系统参数,以便在出现故障时可及时发现并维修。跟踪系统不但要求能跟踪太阳,并且要求安全可靠[9],从系统运行环境及可靠性考虑,还应进行风速保护,避免风速过高时系统结构损坏。DSP 通过对风速传感器信号的采集和处理,判断风速等级,达到危险风速时封锁控制器的输出,将所有镜元位置复位。

图2 系统功能框图Fig.2 Functional block diagram of the system
2.1 DSP 供电及外围电路
正常工作情况下,DSP2812 芯片内核工作电压为1. 8 V,而 I/O 口的工作电压为3. 3 V。使用TPS767D301 作为控制芯片的供电电源,电路结构比较简单,既能满足控制系统对电压需求,又可以很好地满足处理器上电/掉电时的次序要求。利用DSP 的串行数据通信功能,结合RS-232 接口电路,可实现驱动器主控制芯片与上位机的通信。
外围设备的高电平为24 V、5 V,而DSP 的I/O 接口电平为3.3 V,为实现DSP 与外围设备的正常接口,就必须进行外设信号的电平转换,即信号缓冲。本文中采用高速光耦合器TLP521 以及SN74AHCT245DW构成电平转换电路,优点在于其接收5 V 和3.3 V 逻辑电平的同时还可以保证信号有较快的传输速度。为保证系统工作的可靠性,尽可能减小高频信号对控制及输入脉冲信号的干扰,输入输出信号应该进行隔离,使得两部分电路没有直接的电气联系,因此系统采用TLP521 高速光耦合器,构成隔离电路。系统利用实时时间计算太阳位置,因此需要实时采集外部时间,利用DSP 的SPI 功能,与DS1390 专用时钟芯片可构成满足系统要求的时钟电路。
2.2 功率电路和手动调整电路
跟踪器设定功率容量为600 W,母线电压设定为24 V,峰值母线电流设定为20 A。选用高速MOSFET N 型IRF4905 及P 型SN70N10A 构成驱动器的H 逆变桥,驱动电路由光耦电路及共射三极管电路构成。当系统出现驱动欠压和过压过流等异常情况时,能够隔离驱动信号,防止对后续执行机构构成损害。功率电路为高度角直流电机供电,能够输出±24 V 的直流电,保证电机的稳定运行及正反转。
跟踪系统增加了手动调整模块,在安装调试及手动校准时,可通过操控手动板,观察菲涅尔反射镜的动作。此外,还需要对输出开关信号进行逻辑保护,使得控制器只输出正确的驱动信号,这样就能保证控制器输出的执行信号不会出现误动作,导致桥壁直通,损坏功率驱动电路。
跟踪器的执行机构是电压为24 V 的直流电机,控制器的主电源为5 V。因此,整个跟踪器的供电应包括两部分:24 V 直流供电和5 V 直流供电。24 V 直流电源作为电机及传感器电源,5 V 直流电源作为控制器电源。空气开关控制通断外部220 V 交流电,将交直流电源、DSP 外围接口与功率电路和手动调整电路组装即可得到整个跟踪控制器。
3 系统软件设计
3.1 控制原理
本文所设计的跟踪系统采用主动式单轴跟踪,需要根据太阳相对于地球的运动规律实时跟踪太阳,因此需要计算出太阳高度角。太阳和跟踪装置处于不同的坐标系下,根据不同坐标系间的转换计算,可以得到太阳高度角α 的求解式[10-12]:

式中:δ 为赤纬角;ω 为太阳时角;φ 为当地纬度。
根据当地时区以及经纬度,即可求得任意时刻该地的太阳高度角。当太阳高度角变化Δα 时,控制器控制镜元相应的转动Δα/2 就可以将太阳光线反射到吸收器上。系统还需计算出日出、日落的时间,从而决定系统启动和镜元回归初始位置的时间,显然日出、日落时太阳的高度角α 为0,代入式(1)即可求得日出、日落时间。
在得到跟踪轨迹之后,就需要设计相应的控制方法来控制镜元的转动,跟踪系统采用闭环控制,系统的控制原理如图3 所示。跟踪系统的设定值根据地理位置信息以及实时获取的时间信息计算得出,跟踪系统的实际输出由角度传感器实时获取并反馈给控制器,控制器根据设定值以及当前跟踪系统的实际输出计算出控制量,以控制跟踪系统跟踪太阳。

图3 控制原理图Fig.3 Control principle
3.2 控制算法实现
跟踪系统控制流程如图4 所示。

图4 跟踪系统程序流程图Fig.4 Flowchart of the tracking system program
在得到跟踪角度与反馈的角度信号之后,就需要通过相应的控制算法来控制镜场镜元的转动。由于风速对反射镜的影响较大,过高的风速容易对镜场造成毁坏,因此控制器应具备风速保护的功能,当风速大于20 m/s 时跟踪系统将产生风力警报,控制镜元复位并禁止自动运行。另外,由于在对传感器信号进行转换时,需要计算脉冲的累计值,因此控制器还需设置专门的掉电保持功能,以免掉电后数据丢失。跟踪系统只在白天运行,需要计算出日出、日落时间,以决定系统的启停。太阳落山之后,应将支架复位,以便第二天的跟踪,因此还应设计其返回的角度值。
4 精度检测实验
将跟踪系统安装到线性菲涅尔镜场中进行上电实验。经过多次测量取平均值的方法测量出高度角的数据,如表1 所示。从精度检测实验结果可以看出,最大误差为0.39°,可以满足线性菲涅尔聚光系统对高跟踪精度的要求。
(°)
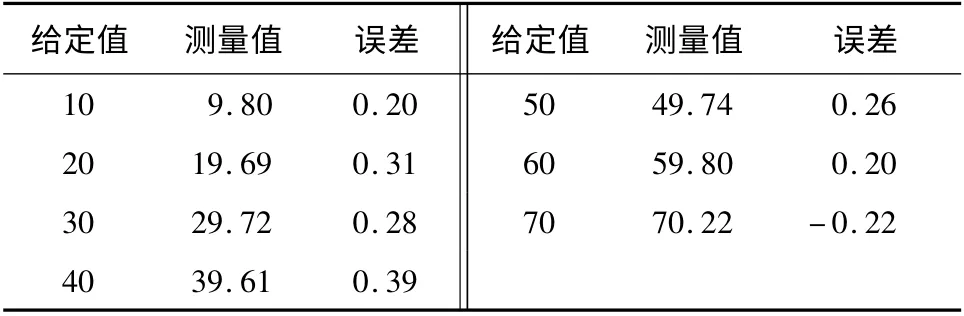
表1 高度角实验数据表Tab.1 Experimental data of the altitude angles
5 结束语
本文设计了基于DSP 的太阳能单轴跟踪系统,通过精度检测实验验证了跟踪系统能正常工作,并且有较高的控制精度,能控制线性菲涅尔镜场中镜元实时精确地跟踪太阳,将太阳光线反射到吸收器上。
[1] Rustemli S,Dincer F,Unal E. The analysis on sun tracking and cooling systems for photovoltaic panels[J]. Renewable and Sustainable Energy Reviews,2013,22(2):598 -603.
[2] Kaltschmitt M,Streicher W,Wiese A. Renewable energy/technology,economics and environment[M].New York:Springer,2007:171-181.
[3] Duffie J A. Solar engineering of thermal processes[M]. W. A.Beckman.New York:Jone Wiley&Sons ,2006:326.
[4] Cavallaro F. Multi-criteria decision aid to assess concentrated solar thermal technologies[J]. Renewable Energy,2009,34 (7):1678 -1685.
[5] Kalogirou S A.Solar thermal collectors and applications[J].Energy and Combustion Science,2004,30(3):231 - 295.
[6] Ford G. CSP:Bright future for linear fresnel technology[J].Renewable Energy Focus,2008,9(5):48 - 49.
[7] Samanta A,Dutta A,Neogi S. A simple and efficient sun tracking mechanism using programmable logic controller[J]. Applied Solar Energy,2012,48(3):218 -227.
[8] MohammadN,Karim T. Design and implementation of hybrid automatic solar-tracking system[J]. Journal of Solar Energy Engineering,2013,135(1):0110131 -0110136.
[9] Rustemli S,Dincadam F,Demirtas M. Performance comparison of the sun tracking system and fixed system in the application of heating and lighting[J]. Arabian Journal for Science and Engineering,2010,35(2):171 -183.
[10]Wang W,Li N,Li S.A real-time modeling of photovoltaic array[J].Chinese Journal of Chemical Engineering,2012,20(6):1154-1160.
[11]Kittler R,Darula S.Determination of time and sun position system[J].Solar Energy,2013,9(3):72-79.
[12]Li Z,Liu X,Tang R. Optical performance of vertical single-axis tracked solar panels[J].Renewable Energy,2011,36:64 -68.
猜你喜欢
气象与环境科学(2021年4期)2021-08-27
中学生数理化·高一版(2021年2期)2021-03-19
海洋通报(2020年5期)2021-01-14
电声技术(2020年4期)2020-07-16
中国电业与能源(2020年5期)2020-06-16
物理学报(2019年24期)2019-12-24
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
农业机械学报(2018年9期)2018-09-17
卷宗(2018年14期)2018-06-29
