考虑铁损时异步电机模糊PI控制的调速研究
2015-03-30 03:25:05刘学飞李谟发宋运雄
湖南工程学院学报(自然科学版) 2015年1期
刘学飞,彭 晓,李谟发,宋运雄
(1.湖南工业大学 电气与信息工程学院,株洲 412008;2.湖南工程学院 电气信息学院,湘潭 411101)
考虑铁损时异步电机模糊PI控制的调速研究
刘学飞1,彭 晓2,李谟发1,宋运雄1
(1.湖南工业大学 电气与信息工程学院,株洲 412008;2.湖南工程学院 电气信息学院,湘潭 411101)
随着工业的发展,控制系统复杂程度的不断加大,参数随机多变,传统PI速度控制器已经不能满足系统对性能的要求,在传统PI速度控制器基础上,根据模糊控制理论,设计了模糊PI控制器,利用MATLAB / Simulink进行传统PI控制器和模糊PI控制器的仿真,对比仿真结果说明模糊PI控制器具有更加好的稳定性和鲁棒性.
异步电机;铁耗;模糊PI控制器;仿真
0 引 言
异步电机因具有结构简单、成本低廉、运行可靠以及效率高等优点得到广泛应用,是工农业生产中得到应用最为广泛的一种电机,异步电机本身是一个多变量、强耦合的非线性系统,相比直流电机转矩控制要困难的多.异步电机现在常用的控制方式就是双闭环的PI控制.PI控制得到广泛应用,因为它本身结构简单,稳定性也不错,但是比较依赖于控制器参数,需要对其进行严格的整定,当系统参数有变化时,不能跟随参数变化而做相应调整,因此采用PI控制器已经不能提高控制性能.
随着控制对象的复杂性、非线性、滞后性和耦合性的增加,人们获得精确指示量的能力相对减少,这便产生了模糊控制.模糊理论给出了一套有效的方法,它可以将人类的语言表达式和规则转化为数学表达式,从而能够使计算机识别和运用.模糊控制是基于自然语句、模糊推理的计算机控制手段.它不再依赖于系统的数学模型,取而代之的是自然语句转化成的“模糊规则”,是一种智能控制. 本文主要是对转速外环电流内环的矢量控制系统中用到的PI控制器进行设计,用模糊PI控制器代替传统的PI控制器,以求使系统达到更好的稳定性和鲁棒性.控制对象为考虑铁损的的异步电机,该电机模型是自己利用MATLAB / Simulink仿真软件搭建的考虑铁损的电机模型.
1 考虑铁损的异步电机转速、电流双闭环控制系统结构
1.1 考虑铁损的异步电机仿真模型
利用MATLAB/Simulink仿真软件根据公式推导搭建考虑铁耗的异步电机仿真模型如图1所示.
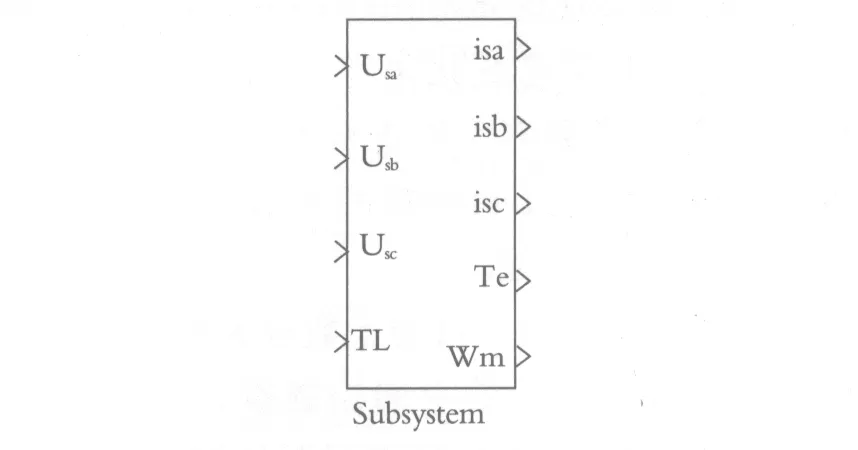
图 1 考虑铁损的异步电机仿真模型
1.2 传统PI控制器的转速、电流双闭环控制系统结构
传统PI控制器的函数表达式为:
由实测转速值和给定值作差得到转速误差,经比例环节和积分环节输出转矩给定值,其结构如图2所示.
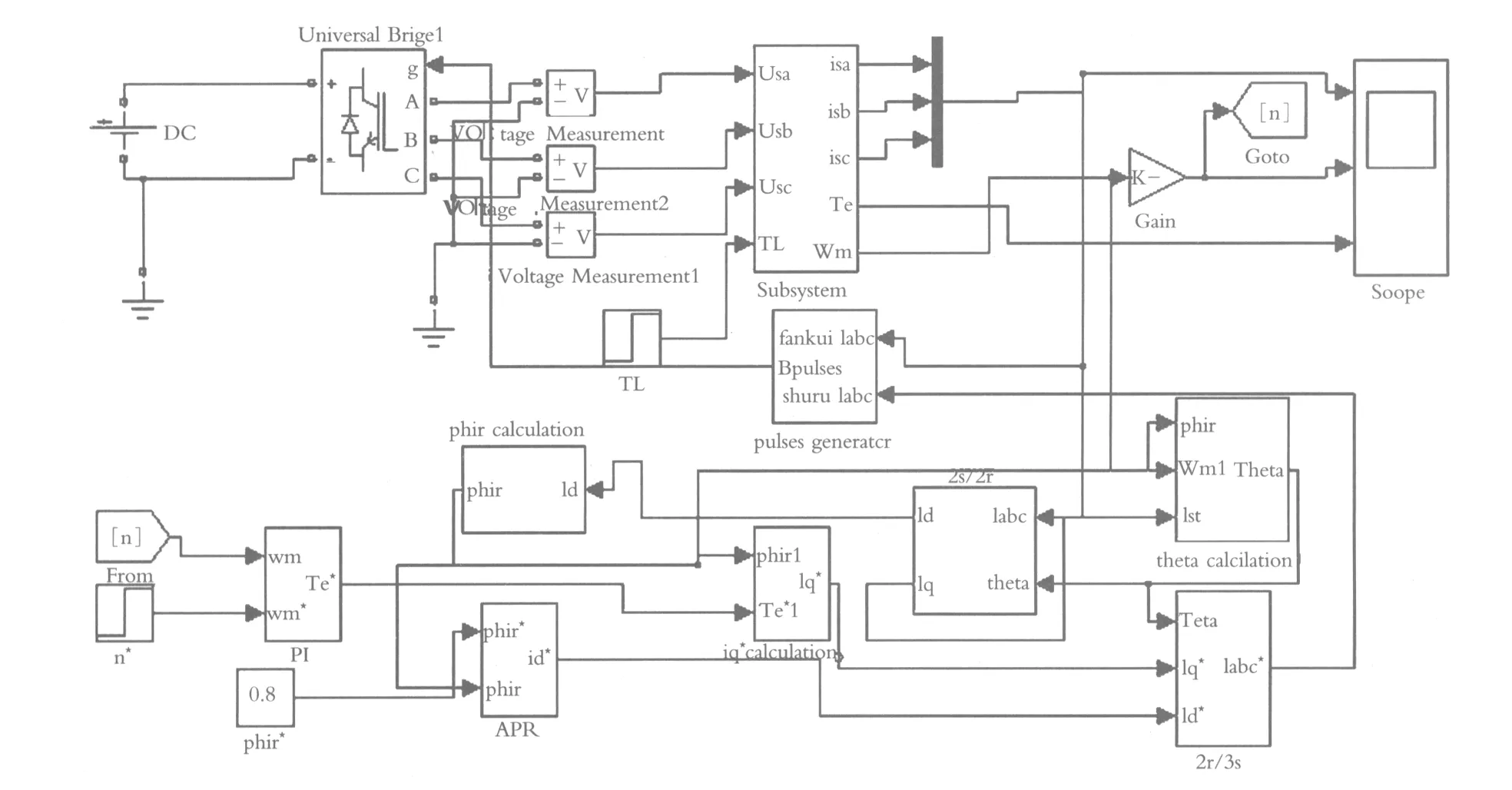

图2 传统PI控制器的转速、电流双闭环控制仿真模型
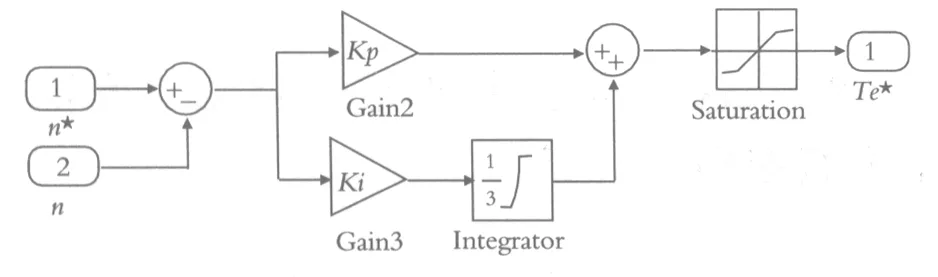
图3 传统PI控制器仿真模型
1.3 模糊PI控制器的设计
PI控制器实现的是对系统的的控制,模糊控制主要是以误差和误差变化率作为输入,依据模糊理论和方法对PI参数Kp、Ki进行整定,以满足不同误差和误差变化率对控制参数的要求,使控制对象得到良好的动、静态性能.
将模糊控制器输入量的个数称为模糊控制器的维数,如图3所示,一维模糊控制器见图4,输入变量是系统的偏差;二维模糊控制器见图5,输入变量为系统偏差和其变化率;三维模糊控制器见图6,输入变量为系统的偏差、偏差变化率和偏差变化的变化率.

图4 一维模糊控制器
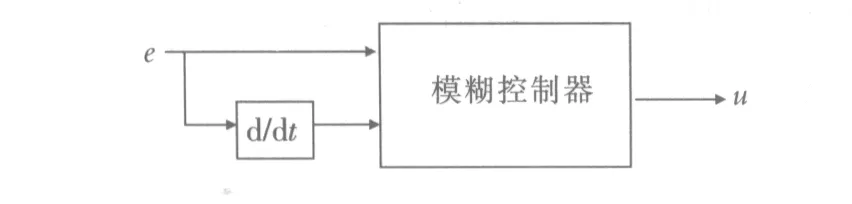
图5 二维模糊控制器

图6 三维模糊控制器
当模糊控制器的维数比较低的时候,控制较为粗糙,性能难以满足控制的需要;维数越高,控制性能越好;维数过高时又会造成系统过于复杂,算法的实现比较困难.因此,本文选择二维模糊控制器.
模糊PI控制器的的结构如图7所示.

图7 模糊PI控制器的结构
模糊PI控制器是通过在线推理的方法在线整定PI调节的比例系数Kp和积分系数Ki,输入则是误差信号e及其误差信号的变化率ec,输出为比例系数和积分系数的增量,以满足不同时间段PI参数的要求,来对电机系统进行更好的控制.
1.4 模糊PI控制器的控制规则
参数自整定模糊PI控制器是找出比例系数、积分系数的模糊关系,并进行不断检测,对输出参数进行实时修改,整定规则如下:
(1)误差e较大时,Kup应取较大值,Kui为0,从而达到提高系统响应速度、避免产生超调以及消除误差的目的;
(2)误差e中等大小时,Kup应取小一些,Kui应取稍微大点的值,从而达到保证系统的稳定性、减小误差、且避免产生超调和振荡;
(3)误差e比较小时,Kup应更小些,Kui取大一点,从而使系统快速达到稳定,并尽量消除静态误差;
(4)结合ec变化,e和ec沿着同方向变化时,Kup应适当增大,反之,则适当减小;
(5)误差变化率ec越小,Kup应取较大值,Kui应取较小值,反之,则Kup应取较小值,Kui应取较大值.
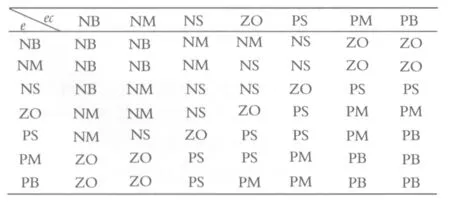
取e、ec、ΔKp、ΔKi模糊子集均为常用子集E={NB,NM,NS,ZO,PS,PM,PB}={负大,负中,负小,零,正小,正中,正大},模糊论域均为[-6,6],得到ΔKp、ΔKi控制规则如表1、表2所示.
表1ΔKp模糊规则表

表2 ΔKi模糊规则表
1.5 模糊PI控制器比例因子的确定
模糊PI速度控制器就是通过整定使电机运行在给定转速,给定转速450 r/min,传统PI最佳比例因数Kp=0.15,Ki=1,误差e变化范围[-3,3],误差变化率 变化范围[-0.15,0.15], 的变化范围[-0.02,0.02],ΔKi变化范围[-0.03,0.03].e、ec、ΔKp、ΔKi模糊论域为[-6,6],得各个比例因子为:Ke=6/3=2,Kec=6/0.15=40,ΔKp=0.02/6=0.0033,ΔKi=0.03/6=0.005,对于其他给定速度,得到其特定整定比例因子.还需经反复在线调试验证.
1.6 模糊PI控制器的建立
我们可以利用MATLAB模糊逻辑控制工具箱提供的GUI工具,建立我们所需要的模糊PI控制器,模糊逻辑工具箱有5个GUI工具,分别为:(1)FIS编辑器,用于编辑输入、输出等信息;(2)隶属函数编辑器,定义变量的隶属函数;(3)模糊规则编辑器,用于编辑控制规则;(4)模糊规则观察器,用于观察推理图;(5)输出曲面观察期.
我们用Mamdani型推理系统,设置模糊论域,选择模糊子集的隶属度函数为常用对称三角形,依照表1和表2,用If-then语句编写49条模糊控制规则,如下:
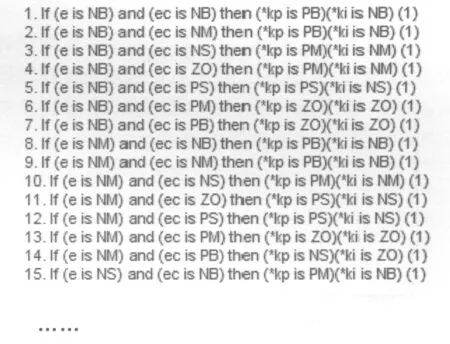
……
共49条模糊控制规则.
2 仿真分析
2.1 模糊PI控制器的仿真参数
模糊PI仿真器仿真模型如图8所示.

图8 模糊PI控制器仿真模型
图1中用模糊PI控制器代替传统PI控制器,建立的FIS文件与matlab仿真模型连接后就可以进行仿真实验了,我们应用一台异步电机实测参数进行仿真,转速给定450 r/min,U=380 V,f=50 Hz,Rr=0.45 Ω,np=2,Rs=0.68 ,Lm=0.1468 H,Lsl=0.0042 H,J=0.05 kg* m2,Rm=46.63 Ω,负载转矩10 N·m.
2.2 仿真结果对比
系统额定负载启动,系统在迷糊PI控制器自整定参数控制下,转速曲线如图9所示,转矩曲线如图10所示,虚线表示传统PI控制器控制下转速变化曲线.
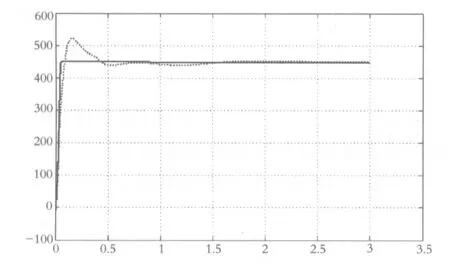
图9 转速仿真曲线图
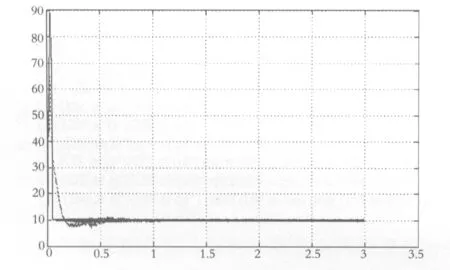
图10 转矩仿真曲线图
由对比图可知,在模糊PI控制下,系统响应时间短,控制效果更加好,超调量明显减少,响应速度明显提高,克服了传统PI控制器易产生超调,调节时间长的缺点.为效率优化控制奠定一定的基础.
3 结 语
本文主要是考虑到异步电机双闭环控制系统中传统PI控制器易超调、响应时间长等缺点,用模糊PI控制器代替传统PI控制器,应用到异步电机双闭环控制系统中,通过仿真实验结果充分说明模糊PI控制器相比于传统PI控制器:响应速度快,抗干扰能力强,鲁棒性大大增强,说明本文所构建的模糊PI控制器在实际应用中的可行性.
[1] Liang ZH. Study of Intelligent Control for Permanent Manget Synchornous Motor of AC Servo System[D]. Shenyang: Shenyang University of Technology ,2009.
[2] 汪海燕,李娟娟,李敬华.自适应模糊Pl控制的无刷直流电机及仿真[J].微电机,2003,42(3):50一55.
[3] 王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2009.
[4] 韩峻峰,李玉惠.模糊控制技术[M].重庆:重庆大学出版社,2003.
[5] 冯冬青,谢宋和.模糊智能控制[M].北京:化学工业出版社,1998.
Research on Fuzzy PI Contronl of Induction Motor with Iron Loss
LIU Xue-fei1, PENG Xiao2,LI Mo-fa1,SONG Yun-xiong1
(1.College of Elect,and Information Eng.,Hunan University of Technology, Zhuzhou 412008, China;2.College of Elect.and Information,Hunan Institute of Engineering, Xiangtan 411101, China)
With the development of industry, the control system complexity continues to increase. The random variable parameters and the traditional PI controller can not meet the performance requirements of the system.Based on the traditional PI speed controller and the fuzzy control theory, the fuzzy PI controller is designed by using MATLAB/Simulink to simulate traditional PI controller and a fuzzy PI controller.The simulation results show that the fuzzy PI controller has better stability and robustness.
induction motor; iron loss; fuzzy PI controller;simulation
2014-09-05
湖南省科技计划资金项目(2013GK3033);湘潭市科技计划重点项目(ZD20141002);湖南省科技计划重点项目(2013XK4013).
刘学飞(1989- ), 男,硕士研究生,研究方向:现代交流调速系统.
TU225
A
1671-119X(2015)01-0001-04
猜你喜欢
湖南电力(2021年4期)2021-11-05 06:44:42
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
初中生世界·九年级(2020年9期)2020-09-21 08:43:33
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
电测与仪表(2016年14期)2016-04-11 12:32:40
通信电源技术(2016年5期)2016-03-22 01:09:57
地震地质(2015年3期)2015-12-25 03:29:53
电源技术(2015年11期)2015-08-22 08:50:38