三维相机检校场标志点图像坐标提取方法
2015-03-29 02:33:46刘凤英陈天恩于留传
测绘工程 2015年7期
刘凤英,王 冬,陈天恩,于留传
(山东科技大学 测绘科学与工程学院,山东 青岛266590)
摄影测量是一种非接触式获取被测目标空间信息的技术[1],随着社会的快速发展和进步,已被广泛应用到越来越多的领域并发挥重要的作用,如传统的航空摄影测量地形图测绘、三维重建、文物保护、工业构件变形检测、农林牧业、城市规划、海岸带和海岛礁测量等。
相机是获取被测目标图像的重要传感器,相机检校是检查和校正所用相机内方位元素和各项光学畸变参数的过程[2],它是摄影测量作业过程中必不可少的重要环节之一,国内外研究人员对相机检校相关内容进行了大量的研究,并取得一些重要的研究成果,如常见的单片和多片空间后方交会法[3]、直接线性变换法[4]和基于灭点理论[5]的标定方法等。其中,基于空间后方交会的相机检校方法是以共线条件方程为基础,以像点坐标为观测值,借助数码相机检校场,解求像片内、外方位元素和某些附加参数的检校方法,单片空间后方交会法相机检校是以一张像片完成的检校,多片空间后方交会法是基于至少两张像片的相机检校,多片后交相对于单片后交的检校方法结果更加可靠和精确[2-3];直接线性变换法相机检校是以像点和物点之间的直接线性关系建立的检校模型,利用检校场解算相机的各项参数 标定结果相对前述方法稍低 基于灭点的相机检校方法则无需借助相机检校场。
通过人工标志控制场进行相机标定的方法中,通常采用人为判别和手工量取的方式获取标志点的图像坐标,为了确保标定结果的精度和可靠性,一般需要提取多张图像的大量标志点坐标,存在标定速度慢、工作量大等常见问题,基于此,文献[7-8]对标志点图像坐标自动提取方法进行了相关研究并提出一些自动提取方法。本文通过对原始标定图像进行高斯滤波和边缘检测后,进行标志点椭圆轮廓的提取和拟合,从而实现标志点中心图像坐标的提取。实验分析表明,文中提取方法流程相对简单,提取速度较快,自动提取结果受畸变差的影响甚小,为相机的快速标定提供保障。
1 人工标志点坐标提取
1.1 图像平滑滤波
获取室内检校场图像的时候,环境、相机传感器中电子元件的质量等因素都会对获取的图像质量产生一定的影响,产生图像噪声。手工方式量取标志点坐标时图像噪声点对其产生的影响较小,一般不做去噪处理;自动提取标志点坐标时需要进行边缘提取,原图像中的噪声点对边缘检测会产生一定的影响,需要对原始图像进行滤波处理。
高斯滤波是一种常见的图像滤波方法,采用传统的高斯滤波方法进行图像处理后,虽然达到了降噪的目的,但图像中的边缘信息一般也被模糊,文中采用文献[9]提出的自适应高斯滤波方法用3×3的模板进行检校场原始图像的处理[9],较好的保持了图像中标志点的边缘信息,自适应高斯滤波器为
式中:Rxy为像素点的目标尺度;(x,y)为像点坐标;σxy为标准差;lxy为高斯核的大小。
1.2 边缘检测
检校场图像滤波后进行边缘检测处理,由于Canny算子检测精度较高以及一些其他优势,文中采用Canny算子进行边缘检测,原理不再赘述。为方便Canny边缘检测,首先将灰度图像进行二值化。文中的图像二值化用Opencv来实现。在Opencv中进行图像的二值化有两个阈值计算函数cv.Threshold和cv.Adaptive Threshold,其中cv.Adaptive Threshol d为自适应阈值计算函数,函数cv.Threshold中阈值为人为指定。文中采用了函数cv.Threshol d(src,dst,t hreshold,maxval ue,threshold Type)进行处理,其中阈值处理的类型t hreshold Type采用了T HRESH_TRUNC,详细的使用方法可参考Opencv说明书,函数中的参数maxval ue直接赋值255;通过对多张不同传感器和不同拍摄条件下的室内检校场图像进行多次测试,参数t hreshol d的取值设为110左右的时候,可以较好的保留图像中的细节信息,提取到的圆形边缘数量最多。图1为原始图像和二值化之后的图像。
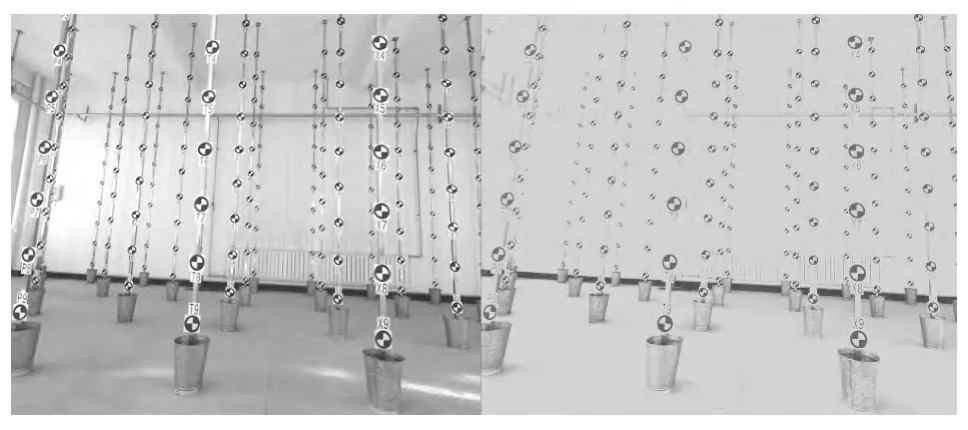
图1 原始图像和进行二值化之后的检校场图像
Canny边缘检测时一般采用双阈值法进行边缘检测和连接,但阈值需要人为事先判别设定,另外阈值的高低直接影响到边缘检测的效果[10]。不同相机和拍摄环境获取的室内检校场图像存在差异,如果采用同样的阈值进行边缘检测,可能导致图像中一些标志点轮廓的丢失和虚假轮廓的出现。为避免人为设定阈值的繁琐,文中采用自适应阈值Canny算子边缘检测方法[10],具体流程如图2所示。自适应阈值边缘检测效果如图3所示。
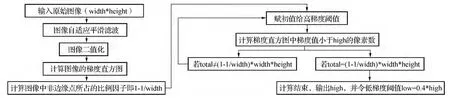
图2 自适应阈值canny算子边缘检测流程
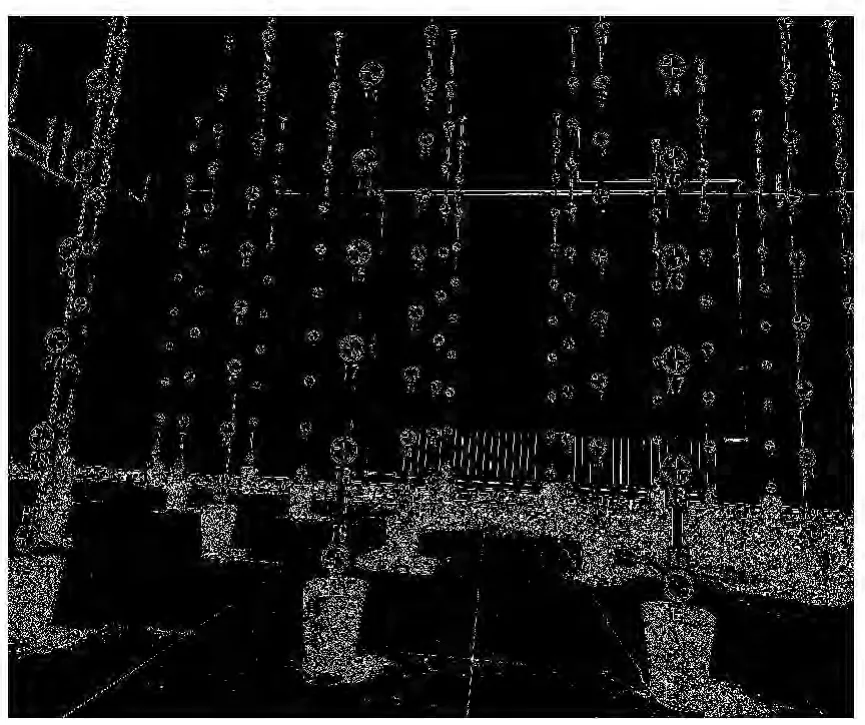
图3 二值化后检校场图像自适应阈值边缘检测效果
1.3 椭圆轮廓的提取
边缘检测后提取到图像中所有的边缘信息的点集,包括标志点的边缘和一些非标志点边缘信息,需要从所有的边缘信息中提取标志点边缘。相机检校场采用的人工标志如图4所示,外形轮廓为圆形。圆的面积s=π×r2(r为圆的半径),圆的周长l=2πr=4×π×),圆
图4 人工标志图形
1.4 人工标志点中心坐标获取
标志点点号的标记采用半自动的方式。相机检校场进行设计的时候,人工标志点的排列具有一定的规律性,同一列的标志点号采用同一字母开头,从上到下按照从0~9的序号依次排列,例如A0、A1、A2、A3…A9表示同一列的10个标志点。标志点进行提取和拟合后,框选同一列标志点,只需人为输入框选范围内的第一个标志点的开头字母,其它点号会自动更改为与物方坐标系对应的点号,此方法很大程度上节约全手工输入点号的工作量。此外,对于提取的个别精度差的标志点,在算法实现的时候加入人为修改自动提取的标志点点位的功能。
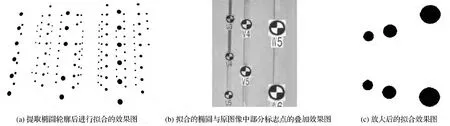
图5 拟合出的椭圆效果图
2 实验分析
实现标志点坐标半自动提取的主要目的是提高相机标定工作的速度和精度,为验证文中提出的方法能否达到上述要求,进行如下相关实验验证。
2.1 实验概况
实验场地为山东科技大学3D实验室内的高精度三维相机检校场,标定场内有前后、纵横交错分布的400个人工标志点 标志点图案如图4所示检校场内标志点的物方坐标采用0.5″级的高精度Axyz/MT M工业测量系统进行观测,然后通过空间前方交会的基本原理获取每个点的坐标,实际观测精度一般都能达到0.05 mm以内。
实验分别采用Canon EOS 5D Mark II(配24 mm镜头)和Point-grey grasshopper(配5 mm镜头)相机从不同的角度对检校场拍照,如图6所示。

图6 实验图像概况
2.2 精度分析
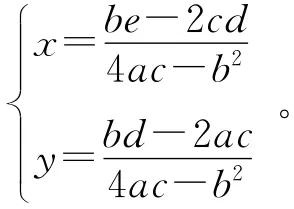
分别对自动提取和手动量测的标志点坐标、以及相机标定结果等进行对比分析,见表1、表2。采用单片后方交会的方式进行相机标定,畸变差改正模型为


表1 自动提取与手动量测标志点坐标对比
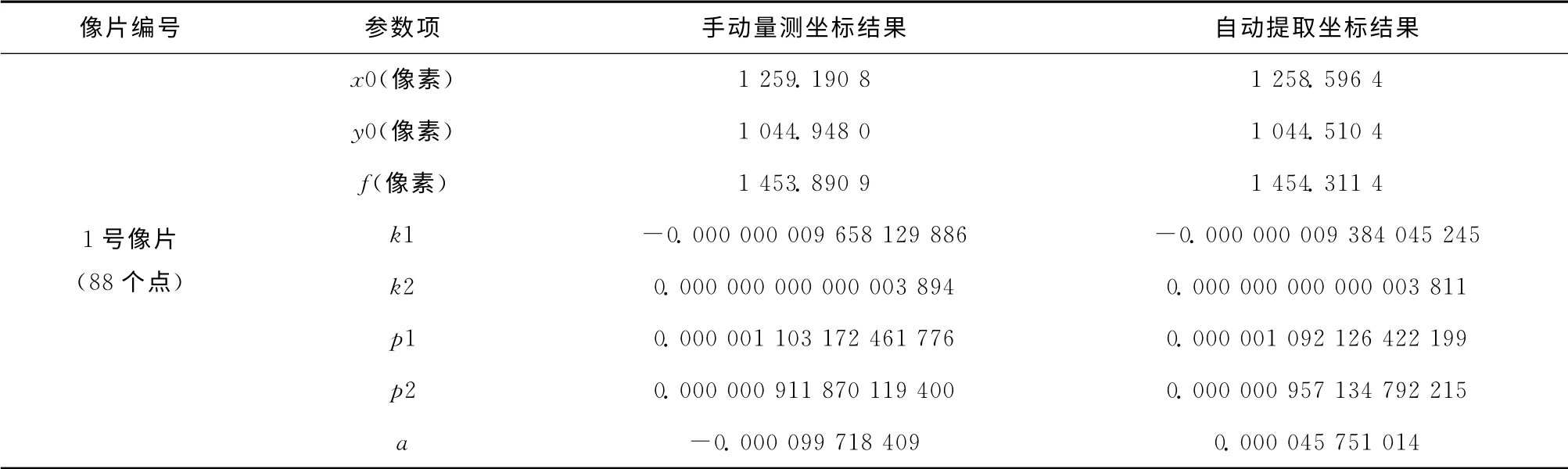
表2 自动提取与手动量测标志点坐标对比

续表2
2.3 实验结论
通过分析上述实验,得出如下几点结论:
1)采用本文提出的室内相机标定场人工标志点图像坐标提取方法可以提取90%以上的标志点坐标,完全满足相机检校的需要;相对于手工量测标志点图像坐标的方式,大大提高工作效率,实现相机快速标定。
2)半自动提取和手工量测的标志点图像坐标较差中误差在0.2像素左右;采用同样的标志点进行相机标定的结果表明自动提取的图像坐标精度更高一些。
3)图像中自动提取不成功的点主要与图像中阴影的存在有很大的关系,所以拍照的时候应尽量注意光照的方向和强度,对于提取不成功的标志点可以通过手工补测的方式进行加点;另外,为了提取更多的标志点坐标,对于图像中圆的提取判别方法需要改进。
3 结束语
标志点图像坐标获取是基于检校场进行相机检校方法中的主要工作之一,相机检校的速度和精度主要受图像坐标量测方法的影响。鉴于手工获取标志点坐标存在工作量大、速度慢等问题,本文针对检校场中的圆形标志图案,通过对检校场图像进行自动边缘检测等图像处理,实现标志点坐标的半自动提取,很大程度上减轻手工量测坐标的工作量,满足相机快速标定的需求。
[1] 朱肇光,孙护,崔炳光.摄影测量学[M].北京:测绘出版社,1995.
[2] 冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002.
[3] 王冬.基于多片空间后方交会的CCD相机检校[D].青岛:山东科技大学,2003.
[4] 李平,全斌,高琴.基于DLT的数码相机检校方法[J].测绘标准化,2008,24(3):25-27.
[5] 谢文寒,张祖勋.基于多像灭点的相机定标[J].测绘学报,2004,33(04):335-340.
[6] 李伟,任超峰.室内控制场数码相机检校应用于通用航空摄影测量的可行性研究[J].测绘工程,2012,21(4):49-52.
[7] 李国胜,林宗坚,任超锋,等.相机检校中标志点的自动提取[J].测绘科学,2010,35(6):161-163.
[8] 刘正坤,林宗坚,苏国中.数码相机控制点自动定位检校[J].测绘科学,2014,39(3):89-93.
[9] 钱晓亮,郭雷,余博.基于目标尺度的自适应高斯滤波[J].计算机工程与应用,2010,46(12):14-20.
[10]赵峰民,杨凯,蔡天一,等.基于最长曲线法的海天线检测方法[J].兵工自动化,2009,28(4):82-84.
[11]雒涛,郑喜凤,丁铁夫.改进的自适应阈值Canny边缘检测[J].光电工程,2009,36(11):106-111.
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29 04:22:22
汽车维修与保养(2020年11期)2020-06-09 05:42:16
测绘通报(2019年4期)2019-05-10 08:16:20
测控技术(2018年12期)2018-11-25 09:37:20
传感器与微系统(2018年7期)2018-08-29 00:44:24
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
传媒评论(2017年2期)2017-06-01 12:10:16
传媒评论(2017年2期)2017-06-01 12:10:16
测绘科学与工程(2017年5期)2017-05-07 06:30:45
光学精密工程(2016年3期)2016-11-07 09:03:34