
风力摆控制系统的设计
2015-03-25 13:22:52王桔,洪梅
长春大学学报 2015年12期
王 桔,洪 梅
(长春大学 电子信息工程学院,吉林 长春130022)
0 引言
目前随着人类社会生活水平越来越高,在现代生产生活中,测量控制系统发挥着举足轻重的作用。风力摆自动控制系统便是最典型具有代表性的测量控制系统。
1 设计要求
设计一长约60cm~70cm 的细管上端用万向节固定在支架上,下方悬挂一组(2~4 只)直流风机,构成一风力摆,如图1 所示。风力摆上安装一向下的激光笔,静止时,激光笔的下端距地面不超过20cm。控制驱动各风机使风力摆按照一定规律运动,激光笔在地面画出要求的轨迹。
2 设计方案
采用4 个直流风机作为动力,四个风机在四个方向相背而放,通过控制风机的转速及工作状态来控制风力摆的运动轨迹。采用以增强型80C51 为内核的STC 系列单片机STC89C52,控制两个LM298 芯片从而达到采用芯片L298 驱动风机,用单片机控制L298 的输入,其工作在占空比可调的开关状态,精确调整风机转速。电路设计简单,抗干扰能力强、可靠性好。采用双电源供电。风机驱动电源与控制电源分开,控制电机部分用YB1731 直流稳压电源提供12V 电压,单片机控制系统用另一端提供5V 电压,确保系统的稳定性,满足了系统对供电需求。如图2 所示。
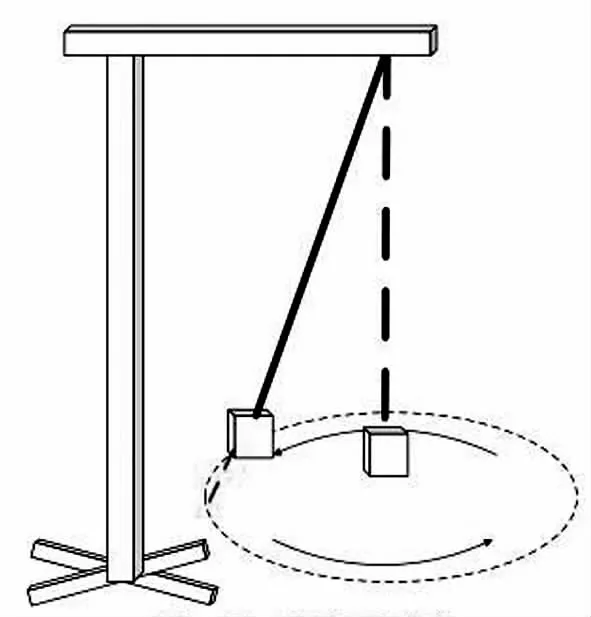
图1 风力摆结构示意图
3 电路设计

图2 风力摆设计框图
3.1 单片机控制模块
单片机最小系统为主要控制系统。单片机模块电路图如图3 所示。
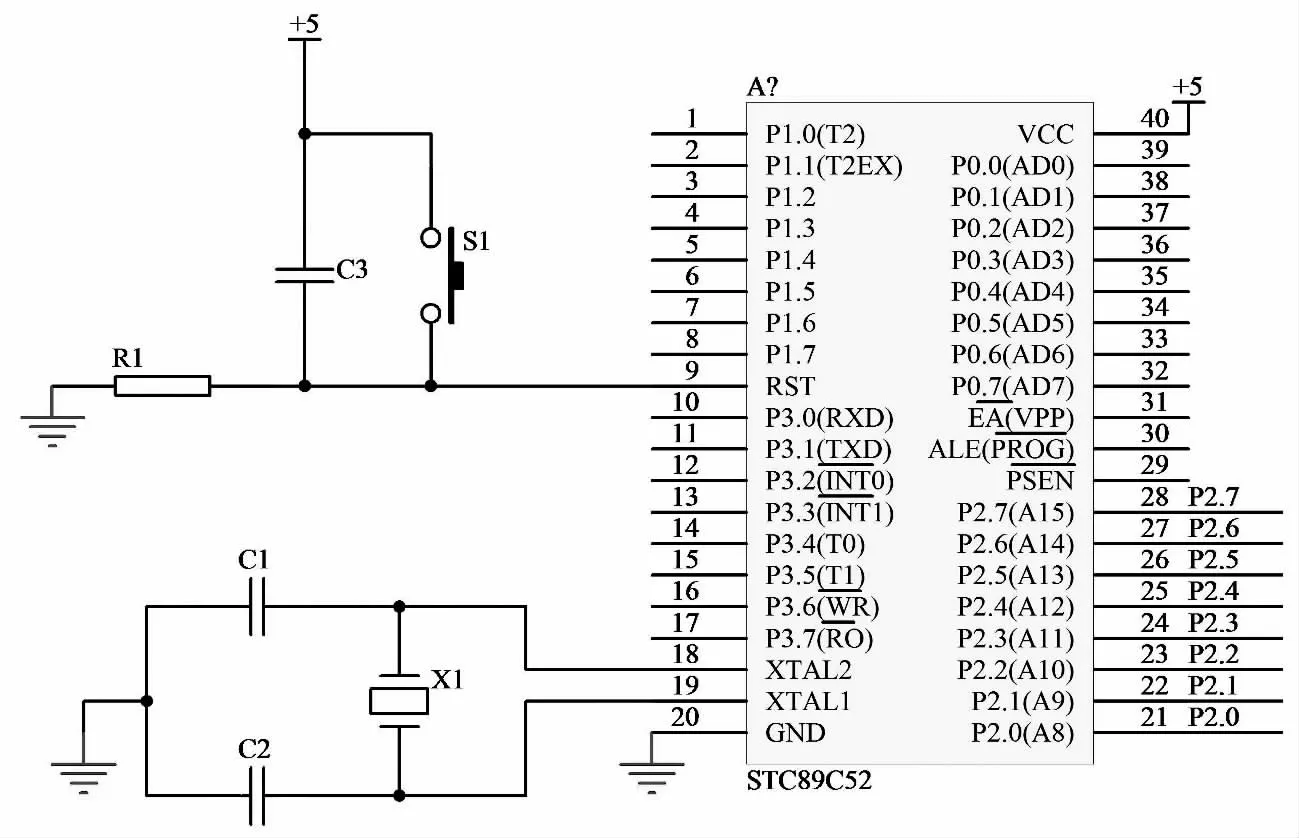
图3 单片机模块子系统电路
3.2 风机驱动模块
风机驱动模块采用L298 芯片控制两个风机的启停与风速,风机驱动电路图如图4 所示。
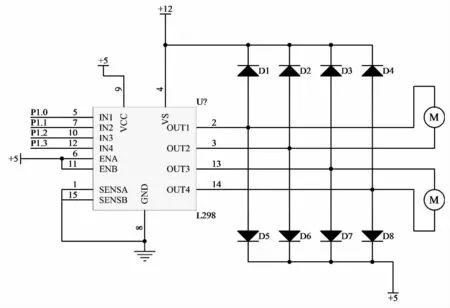
图4 风机驱动子系统电路
3.3 按键
通过按键控制风机的不同转速与启停时间,按键电路图如图5 所示。
3.4 液晶显示模块
按键功能通过单片机处理使相应功能数据在液晶屏上显示出来,液晶显示电路图如图6 所示。
3.5 电源模块
电源由变压部分、滤波部分、稳压部分组成。为整个系统提供±5V 或者±12V 电压,确保电路的正常稳定工作。这部分电路比较简单,都采用三端稳压管实现,故不作详述。

图5 按键电路
4 系统理论分析与计算
4.1 风力摆运动的分析
风力摆采用4 个直流风机作为动力系统。当一侧直流风机工作时,由于风力的作用使风力摆摆动一定的角度,单片机调节输出PWM 的占空比,从而调节风机的摆动角度的大小。
4.2 卡尔曼滤波算法
5 系统程序流程设计
本系统采用4 个独立按键输入各参数及测试模式,系统上电运行第一个基本要求,使风力摆左右摆动,然后通过按不同的按键控制不同的风速达到其他基本要求,系统程序流程图如图7 所示。

图6 液晶显示模块

图7 程序流程图
6 测试方法与结果
6.1 软件与硬件测试方案
硬件测试时,每级分开,单独测试,然后连接测试看是否达到要求。软件仿真测试时,看能否控制风机,然后风机电路和连接在一起测试看电机是否正常工作。
6.2 测试条件与测试仪器
测试条件:检查多次和硬件电路和仿真电路必须与系统原理图完全相同,并且检查无误,硬件电路保证无虚焊。
测试仪器:直流稳压电源、数字万用表
6.3 测试结果及分析
要求1:15s 内使激光笔在地面稳定地画出一条长度不短于50cm 的直线段。各测试结果如表1 所示。

表1 测试结果
要求2:15s 内使激光笔在地面稳定地画出一条长度可设定(30 ~60cm)的直线段。各测试结果如表2所示。

表2 表测试结果
经过测得的数据显示风力摆拉起一定角度后,如果不提供动力,摆杆将逐渐衰减,但是速度缓慢,因此需要提供与运动方向相反的力,阻碍摆杆运动。
7 结语
本设计采用STC89C52 芯片为控制核心,两个L298 电机驱动模块控制直流风机的转速,四个直流风机控制摆动的四个方向,四个直流风机同一时刻的不同转速,实现了风力摆在只受直流风机为动力控制下快速起摆、画线、恢复静止的功能稳定的左右摆动。基本实现了测控系统的各种要求。
[1] 谭浩强.C 语言程序设计[M].北京:清华大学出版社,2012.
[2] 李志民、张遇杰.同步电动机调速系统[M]//电气自动化新技术丛书.北京:机械工业出版社,1996.
[3] 陈伯时主编.电力拖动自动控制系统[M].2 版.北京:机械工业出版社,1992.
[4] Leonhard,W.Controlof Electrical Drives[M].2nd ed.Springer-Verlag,1996.
[5] 王兆安,黄俊.电力电子技术[M].4 版.北京:机械工业出版社,2000.
[6] 李仁定.电机的微机控制[M].北京:机械工业出版社,1999.
猜你喜欢
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:36
测控技术(2021年10期)2021-12-21 07:10:20
电子制作(2021年3期)2021-06-16 03:14:26
通信电源技术(2018年3期)2018-06-26 06:33:32
山东工业技术(2016年15期)2016-12-01 05:31:27
电子制作(2016年1期)2016-11-07 08:43:05
电源技术(2015年11期)2015-08-22 08:50:36
电测与仪表(2015年10期)2015-04-09 11:48:02
少年科学(2014年2期)2014-02-24 07:23:56
家电科技(2013年4期)2013-07-09 10:55:08
