
基于单片机控制的太阳能智能小车
2015-03-22 00:54:36钟伟东
太原城市职业技术学院学报 2015年3期
钟伟东
(广东河源技师学院,广东河源517000)
基于单片机控制的太阳能智能小车
钟伟东
(广东河源技师学院,广东河源517000)
太阳能智能小车以STC89C52单片机为控制核心,在单片机的控制下实现前进、后退、转弯、停止、前后方障碍物判断、遥控信号接收与解码、运动状态显示以及太阳能充电等功能,通过红外遥控器对小车进行启动、停止和后退。当小车驱动电源低于8.4V时,可通过太阳能自动充电控制系统对充电锂电池进行充电,保证小车有足够的驱动电压。
单片机;太阳能;环保;智能小车
随着工业的快速发展,环境污染状况加剧,倡导使用新能源产品已迫在眉睫,发展环保新能源技术是解决问题的关键所在。太阳能智能小车结合新能源产品的要求,采用环保新能源技术研制而成。在遥控器的控制下,小车可前进、后退、停止,并在车载LED屏上显示相应的运动状态。在前进过程中,若遇前方有障碍物,小车通过超声波电路的检测进行避障;在后退在过程中,如遇后方在所设范围内有障碍物,小车马上停止运动,避免撞到障碍物;当小车电源电压不足8.4V时,太阳能充电控制系统将自动启动充电功能,通过太阳能电池板光电转换,对电源进行补给,保证小车能正常运行。
一、智能小车电路方框图及实物图
太阳能智能小车主要由单片机主控电路、红外遥控接收电路、前后方障碍检测电路、电机驱动电路、太阳能自动充电控制系统、小车底盘和电源等8个部分组成如图1和图2所示。
二、智能小车主控电路及其控制过程
1.主控制电路原理图
主控制电路主要由单片机STC89C52、12MHZ时钟电路和自动复位电路组成,如图3所示。单片机是将CPU、RAM、ROM、定时器/计数器以及输入/输出接口电路等计算机主要部件集成在一块芯片上,这样所组成的芯片级微型计算机称为单片微型计算机,简称为单片微机或单片机。随着电子技术的发展以及应用需求的发展,单片机以其高可靠性、高性价比、低电压、低功耗、体积小、应用灵活等一系列优点,近几年来得到迅猛发展和大范围推广。尤其在控制领域几乎无处不在,从工业过程控制到家用电器控制,从尖端科学技术到日常生活用具,单片机控制的例子枚不胜举。本作品以STC89C52为控制核心,与红外线接收、超声波检测等接口电路相结合进行设计,单片机的P0口和P2口为车载LED点阵显示驱动接口、P1口为电机驱动接口、P3为超声波检测和红外线接收等接口。
2.主控电路程序控制流程图,如图4所示

图1 智能小车电路方框图

图2 智能小车实物图
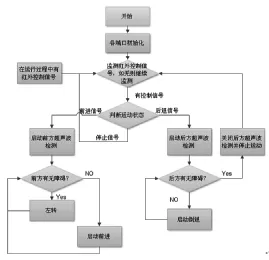
图4 小车主控电路程序控制流程图
三、小车各接口电路原理图及工作原理
(一)红外信号发射与接收电路
常用的红外遥控收发系统由发射和接收两部分组成,红外发射采用专用集成电路芯片(HT6221)进行编码调制,接收采用万能红外接收器,利用单片机对红外信号进行解码。红外信号的发射与接收过程如图5所示。从图中可知,红外信号的发射部分包括矩阵键盘、编码调制、LED红外发射;接收部分包括万能红外接收器、单片机解码电路。
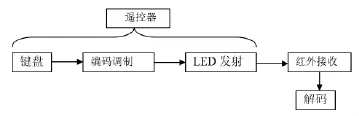
图5 发射与接收过程
1.键值编码原理
常用的红外遥控器,一般采用PPM(Pulse Position Modulation脉位调制)调制的HT6221芯片。其键码的编码原理如下:
当用户按下按键的时间超过36ms时,振荡器使芯片激活,芯片将会产生9ms头码,4.5ms的空码,低8位的用户地址码(9ms-18ms),高8位的用户地址码(9ms-18ms),8位操作码(9ms-18ms)和操作码的反码(9ms-18ms),如所有代码时间未足108ms则以空码来弥补。当按键时间超过108ms,将自动发射第二个代码,第二个代码仅发射9ms的载波信号、2.5ms的空码、0.56ms的载波信号和95.94ms(108ms-9ms-2.5ms-0.56ms=95.94ms)的空码,如还未松键,则以第二个代码的形式发射第三个、第四个、第五个代码也称之为连码发射。信号波形如图6所示。
2.键值解码原理
根据键码形成的特征,采用单片机外部中断零(p3. 3)作为遥控器数据的输入端口。当遥控器发射9ms的头码(低电平)时,将会触发单片机的外部中断并执行解码程序,接收电路原理图如图3所示(解码程序略)。
(二)超声波测距模块接口电路
小车采用超声波测距模块电路(HC-SR04)作为前后方障碍物检测模块,通过单片机的P 1.0和P 1.1脚控制切换控制电路(如图3所示)进行选择前后方测距模块,测距模块的工作原理是单片机的P3.2脚输出一个40kHz的触发信号到超声波测距模块的TRIG脚,由超声波测距模块的发射器发射超声波,由超声波测距模块的接收器接收遇障碍物返回的超声波,然后模块电路的ECHO脚产生一个回应信号,此ECHO信号被单片机所检测,时序图如图7所示。由于超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出小车距障碍物的距离,即S=VT/2。

图7 超声波障碍距离检测时序图
(三)车载LED点阵显示的基本原理及控制电路
从图8中可以看出,8X8点阵共需要64个发光二极管组成,且每个发光二极管是放置在行线和列线的交叉点上,当对应的某一列置1电平,某一行置0电平,则相应的二极管就亮;要实现显示图形或字体,只需考虑其显示方式。通过编程控制各显示点对应LED阳极和阴极端的电平,就可以有效地控制各显示点的亮灭,LED点阵的所列接至单片机的P0口,行分别接至三极管Q1-Q8的集电极,再由单片机的P2口控制Q1-Q8的基极。

图8 车载LED控制电路原理图
(四)电机驱动接口电路
电机驱动接口电路采用L293D集成电路,该集成电路是ST公司生产的一种高电压、小电流电机驱动芯片。该芯片采用16脚封装。主要特点是:工作电压高,最高工作电压可达36V;输出电流大,瞬间峰值电流可达2A,持续工作电流为1A。内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和继电器线圈等感性负载;该芯片可以驱动两台直流电机,其驱动电路原理图和电机控制逻辑表如图9和表1所示。

表1 电机控制逻辑表

图9 电机驱动原理图
四、小车电源及太阳能充电控制电路工作原理,电路原理图如图10所示
小车5V电源主要由2节3.6V锂充电电池串联,经过三端稳压管7805稳压输出后提供。
太阳能自动充电控制电路采用锂离子电池充电控制器LM3420-8.4,该充电电路可对2节3.6V串联的锂离子电池组充电。当电池组电压低于8.4V时,LM3420输出端无电流输出,三极管Q1截止,使LM317输出电流太小为1.25/RN的恒定电流,在充电过程中,电池组电压不断上升,并由充电控制器LM3420-8.4的输入端所检测。当电池组电压上升到8.4V时,控制器LM3420-8.4输出电流,使三极管Q1控制LM317的输出电压,充电电路切换到恒压充电模式,电池电压稳压在8.4V。其中三极管Q1和二极管是预防电池反充作用。
太阳电池的机械结构改进。按照太阳电池的结构,电池之间必需要用多根导线连接,导线连接必将影响小车的外观和电池的滑动。经过研究,采用折叠轨道式连接不仅解决了如上问题,而且还易于更换、增加太阳电池,使用更方便。
太阳能智能小车结合新能源产品的要求,采用环保新能源技术研制而成,具有开发成本低、操作方便、低功耗、设计新颖等特征,属绿色、环保、节能的电子产品。
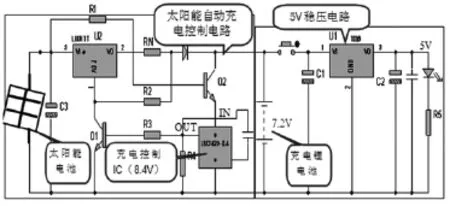
图10 小车电源及太阳能自动充电控制电路
[1]胡乾斌,李玲,甘锡英.单片机微型计算机原理与应用[M].武汉:华中理工大学出版社,1992.
[2]马忠梅,刘滨,戚军,马岩.单片机C语言Windows环境编程宝典[M].北京:北京航空航天大学出版社,2003.
[3]Michael JPont.C语言嵌入式系统开发[M].陈继辉,译.北京:中国电力出版社,2003.
[4]梁廷贵,王裕琛,晁树明,王瑞山.遥控电路可控硅触发电路语音电路[M].北京:科学技术文献出版社,2002.
T
A
1673-0046(2015)3-0191-03
猜你喜欢
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
科学咨询(2020年53期)2020-03-19 07:41:46
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
汽车维护与修理(2019年3期)2019-08-08 02:29:10
文苑(2018年22期)2018-11-19 02:54:18
汽车维护与修理(2018年5期)2018-09-29 02:41:46
汽车维护与修理(2018年23期)2018-07-03 07:10:10
电子制作(2018年8期)2018-06-26 06:43:02
