小型果园升降作业平台液压系统的设计
2015-03-21 07:25:42刘大为谢方平
时代农机 2015年10期
刘大为 ,谢方平 ,2,卢 颂 ,李 旭
(1.湖南农业大学 工学院,湖南 长沙 410128;2.湖南省现代农业装备工程技术研究中心,湖南 长沙 410128)
提高果园管理的机械化水平与自动化程度,走节本增效之路,是我国果园管理机械化的终极目标。升降平台作为目前最适用于果园采摘的实用机具,载人作业时的安全、高效是其必备的性能指标。为实现平台的升降以及载人工作台的可调平,课题组设计的小型果园升降作业平台由履带行走装置、动力装置、调平装置、升降装置、载人工作台等组成。工作时,通过动力装置驱动履带式行走机构进行行走,到达工作位置后,根据载人工作台的平衡情况,由液压系统驱动调平装置对载人工作台进行调平,而后工作人员进入载人平台进行作业,并通过升降液压缸调整工作台高度,以适应果实不同的采摘高度。该机器可适应果园采摘、疏花过程中的需要频繁移动位置的作业现状,提高了整机的机动性和作业效率。
液压系统是果园升降作业平台最重要的控制单元,其工作性能的好坏直接决定了果园升降平台的操作性能、工作效率及使用寿命。针对升降平台的结构组成及功能要求,笔者对其液压系统进行了设计,推导了执行元件负载变化的理论表达式,拟定了液压系统原理图,并对各回路和液压元件进行了分析计算。
1 升降作业平台及液压系统设计要求
(1)平台结构组成及功能需求。小型果园升降作业平台由履带行走装置、动力装置、调平装置、升降装置、载人工作台、液压系统和电控系统等组成。其中升降装置由剪叉机构、底座及升降液压缸组成;调平装置由回转支承、定轴轮系以及角度调整油缸、回转液压马达等组成,如图1所示。
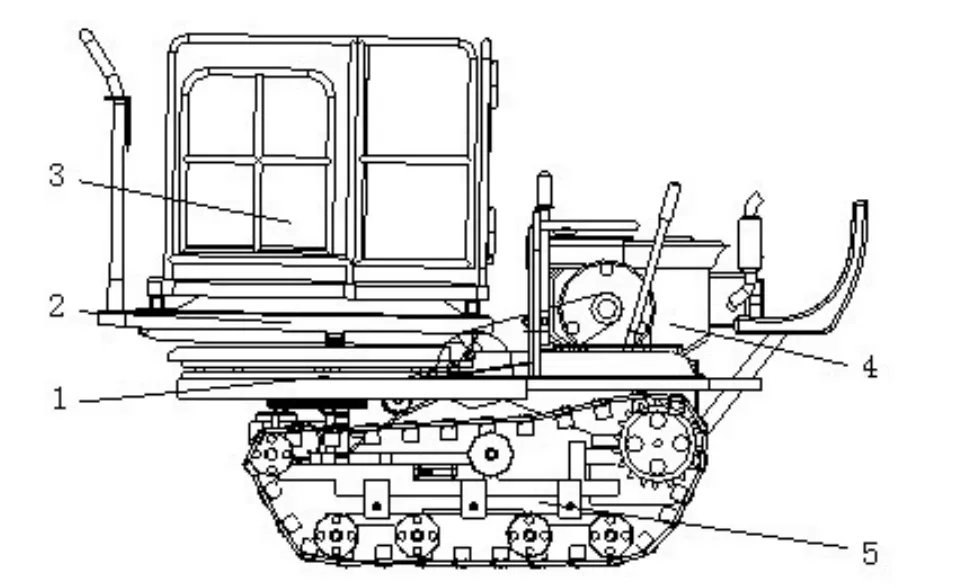
图1 小型果园升降作业平台结构图
果园升降作业平台适用于南方丘陵果园,其种植模式和作业环境决定平台必须结构紧凑、启动方便、升降灵活、作业面大、控制简便等性能。同时,控制系统应具有良好的“点动”性能,满足实际操作需求,做到能最大限度地减轻工人的劳动强度,并保证载人升降作业的安全可靠性。
(2)升降调平装置结构。升降装置的举升油缸采用斜拉剪叉梁式结构进行布置,沿举升方向初置安装角为10°。调平装置底部角度调整液压缸缸体与销轴同端,沿剪叉机构横向与销轴成垂直角度布置,液压油缸的另一端与剪叉机构底部相连,初置安装角为5°,驱动角度调整液压油缸可以使得剪叉机构绕销轴进行转动,整体结构如图2所示。
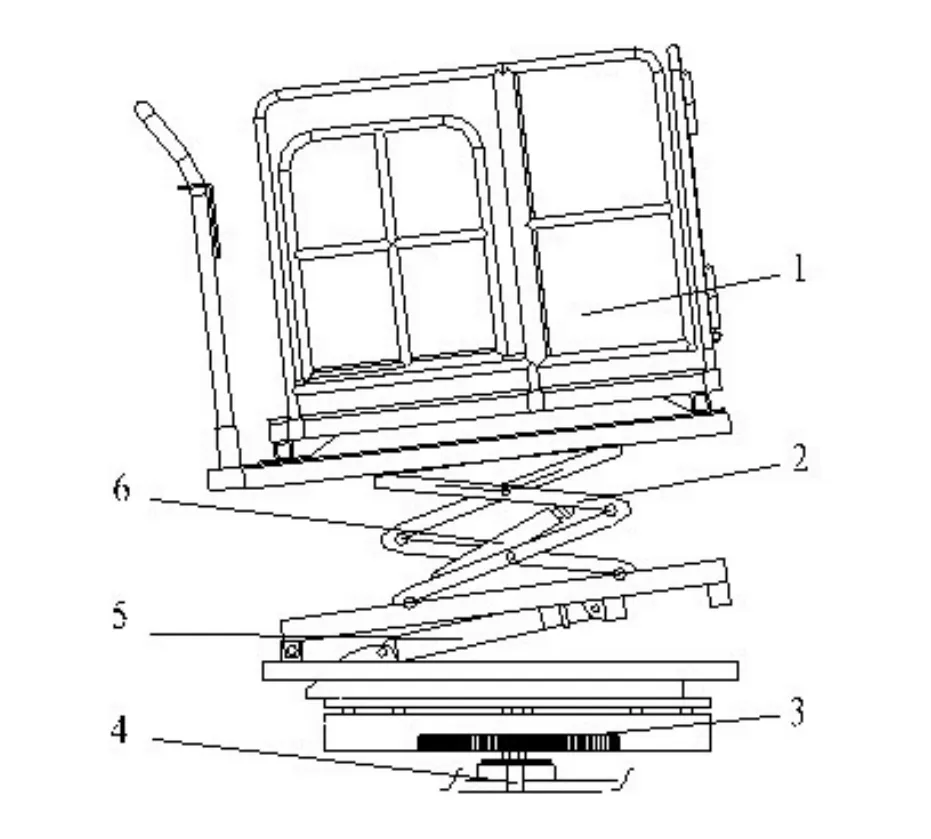
图2 可调平升降装置结构图
(3)升降平台作业流程。当整机处于任意作业位置时,由于果园地面崎岖不平以及采摘平台负载的变化,载人工作台可能处于非水平状态,甚至会发生偏转,极易造成作业人员的不安全。通过“二次调平”设计,对载人工作台进行“方向”和“角度”调平,可以让重心稳定在支承平面内保持不变,有效保证整机的稳定性能,同时减少了通过支腿支撑带来的不便捷性,提高了平台的移动效率。作业流程:果园采摘平台处于非水平状态时,由传感器对上平台倾斜状态进行信号采集,控制系统对信号进行处理,变成输出信号传递给执行部件。执行部件液压缸和液压马达进行相应的动作,对载人平台进行调平。之后,工作人员进入载人平台进,并通过升降液压缸调整工作台高度,以适应果实不同的采摘高度。
(4)平台主要技术参数。升降平台主要技术参数如表1所示。

表1 果园升降作业平台主要技术参数
(5)液压系统设计要求。小型果园升降作业平台的工作过程包括以下几个非连续性运动:工作台回转、角度调整、剪叉升降、整机行走和其他辅助运动。通过液压马达、回转支承、角度调节装置、升降装置的驱动可以实现平台调平和升降。但由于采摘对象位置多变,平台实现升降运动以及行走、载运过程中的阻力各不相同,为了满足作业需要,提高作业效率,针对“定点”作业过程中必须保障整车的稳定性要求,需要液压系统具有良好的控制特性和动作协调性。
2 液压缸工作负载计算
2.1 升降液压缸负载分析
依据瞬时功率相等原理,假设平台负荷为W,剪叉机构自重为G,剪叉臂长度为L,剪叉臂与水平方向的夹角为α,液压缸与水平面的夹角为β,把液压缸简化成滑块导杆机构,各构件编号图3所示。已知Led2=45cm,Lcd=20 cm,令m=Led2/L,n=Lcd/L,根据剪叉机构运动特点可知,点 a、a1、a2在升降过程中为同一垂直面移动,通过对升降台进行模块划分并加以分析后,运用速度多边形法来推导油缸推力F的计算公式。
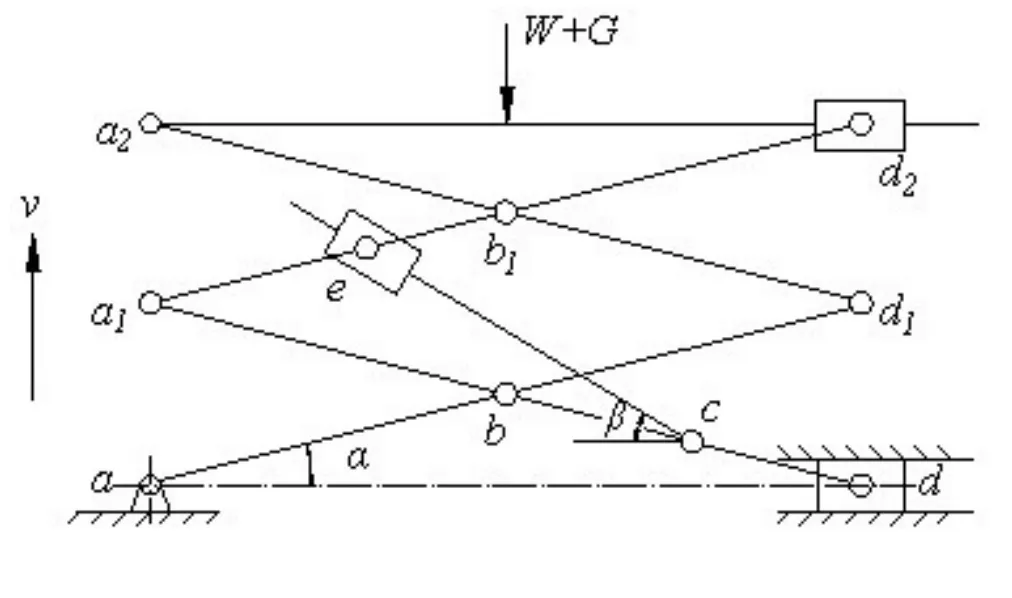
图3 剪叉机构运动及受力简图

F即为升降液压缸的负载大小。在液压缸驱动剪叉臂运动过程中,把液压缸作用力的方向看作近似于平行于同向的剪叉臂。即有:β≈α+10°,由于剪叉臂之间的最大剪叉角度为60°,有α∈[0~30°];由此可得,升降液压缸的负载变化随着剪叉角度的增大而减小,当平台最大负载,即液压缸处于起始位置时的驱动力最大。求得:Fmax=35.5kN。
2.2 调平液压缸负载分析
根据前述操作流程,当调平液压缸工作时,平台未承受负载,只需承受自重。

因此,可知在安装角位置时,调平油缸承受的力分解到垂直方向时所承受的负载最大。
由于升降作业平台的最大爬坡角度为15°,有α'∈[5°~15°],求得 Fmax=28.1kN。
由于在平台升降过程中,实际操作多为点动(启动或快退时间为 5 s,取平均速度为 0.04 m/s),由式(1)、式(2)可知,液压缸负载的变化随调平角度和平台高度的增加而减小。考虑到剪叉机构升降过程中工件间的滚动摩擦可忽略不计;根据其升降速度≤0.2m/s的要求,可知在最大负载情况下,升降油缸快退过程中液压缸所承受的负载最大。
3 液压系统方案设计
3.1 液压缸主要参数的确定
根据工作流程和两液压缸的负载计算情况,升降作业平台液压系统液压缸的最大负载为35.5kN,假设液压缸的机械效率ηm=0.9,根据负载选择执行元件工作压力参照表可知,宜取p1=4MPa。由于载人工作台在上升和下落过程速度要求较慢,均近似看作等速运动。因此,液压缸可选用单杆式,并在举升时作差动连接,其中A1≈2A2(A1为无杆腔工作面积、A2为有杆腔工作面积)。即活塞杆直径d与缸筒直径D之间的关系为:d=0.707D。在载人工作台下降操作中,液压缸回油路上必须具有背压p2,以防止重力过大时掉落。根据文献推荐数值,取p2=0.5MPa。同时,虽然举升时液压缸做差动连接,但由于油管中有压降△p存在,使得有杆腔的压力大于无杆腔,取△p≈0.5MPa,可根据无杆腔工作面积计算公式:

求得
同样求得活塞杆直径d=0.707D=8.2cm
根据GB/T2348-2001将所计算的D和d值分别圆整成就近标准直径,选取标准密封件。圆整后得:D=12.5cm,d=8cm。由此求得液压缸两腔的有效面积为:A1=πD2/4=122.7cm2,A2=π(D2-d2)=72.4 cm2。经检验,活塞杆的强度和稳定性均符合要求。同理,可求得调平液压缸的相关参数如下:A1'=83.1cm2、D'=10.3cm、d'=7.3cm,圆整后取 D'=11cm、d'=8cm、A1'=95cm2、A2'=44.7cm2。
3.2 液压缸工作压力、流量和功率
根据前述各参数,当背压按pb=0.5MPa计算时,算得升降液压缸工作过程的压力、流量和功率,代入,如下:
进油压力:

求得p1=3.5MPa
单位时间输入流量:
q=A1·V=49.1ml/s=2.94 L/min
输入功率:
P=P1·q=0.17 kW
同理,可求得调平油缸相关参数如下:
P1'=3.5MPa、q'=2.28L/min、P'=0.08kW。
3.3 液压回路的综合
根据液压系统工况,选用定量泵供油,泵的供油压力由先导式溢流阀设定,二位二通电磁换向阀用于控制液压泵的卸荷。因系统只有回转、倾角调整、升降三种动作,且无特殊工作动作要求,因此选用单活塞杆液压缸和双作用定量液压马达。考虑到平台工作位置多变,系统需要频繁启停,为防止在上升过程停留时平台下落,同时在停留期间内保持平台的高度不变,特在各支路上采用双向液压锁,从而保证用以实现执行元件的静态锁止。对于液压马达的运动,无特殊要求。将上述所选定的液压回路进行组合,液压系统原理图如图4所示。

图4 液压系统原理图
3.4 主要液压元件的计算与选择
(1)液压泵的参数计算。已知p1=3.5 MPa,考虑到本液压系统油路较为简单,选取进油路总压力损失,则液压泵最高工作压力为:

求得pp=3.9MPa
泵的额定压力可取:Pr≥1.25Pp=4.9MPa
又液压泵的最大供油量qp按液压缸的最大输入流量进行估算,取泄露系数K=1.3,则:

求得液压泵的流量qp=6.8L/min。
根据以上计算结果,查阅《机械设计手册》,选用规格相近的YB-A9B型叶片泵,其理论排量为9.1m l/r,额定压力为7 MPa,额定转速为1000r/min,输出流量为6.9L/min,泵的总效率ηp取0.85,则求得液压泵驱动电机所需的功率为:

求得P=1.3kW
选用电动机型号:Y90L-4型电机,其额定功率1.5kW,转速为1400r/min。
(2)液压马达的选择。为方便控制回转支撑的左右转动,提高回转效率,回转液压马达的选择需采用双向定量液压马达,同时,采用采用定轴轮系传动,设定其传动比5≤i≤10。
已知回转支承上平台质量及额定负载总量为450kg,平台最大升降高度为1.2m,最大爬坡角度为15°,根据回转支承计算结果,初选其产品型号为:回转支承013.25.500.10 JB/T 2300,其中da=602mm。为计算液压马达的扭矩T(N·m),我们把回转平台看作一个质量为m=450kg,直径为da的实心圆柱体,则有:

求得,液压马达所需的扭矩为67.6N.m
又知平台允许的最大回转速度为4.5r/min,根据拟定的回转支承传动比大小,可知液压马达理论上允许的最大转速为45r/min。
显然,理论算得的液压马达扭矩较小,转速较低,现有产品的性能参数与之不能匹配,可增加一级蜗轮蜗杆减速器传动,以满足马达转速要求。由于负载的确定性,马达所需的扭矩大小明确,根据马达扭矩,拟定马达转速为120r/min,查询《机械设计手册》第五版第5卷表21-5-82中,可选YM-B102B叶片液压马达。
4 结语
(1)升降平台的液压系统中液压缸设置了双向锁紧装置,使调平和升降动作平稳,提高系统的安全性和可靠性。
(2)采用液压马达直接驱动回转支承的方式,不能满足平台设计指标,需要增加一级传动,方可满足使用要求。
[1]王海波,刘凤之,王孝娣,等.我国果园机械研发与应用现状[J].果树学报,2013,30(1):165-170.
[2]刘大为.柑橘园升降作业平台的设计与试验研究[D].长沙:湖南农业大学,2013.
[3]王小龙,谢方平,刘大为,等.果园升降平台调平装置的设计与试验[J].湖南农业大学学报:自然科学版,2014,(5):548-551.
[4]刘大为,谢方平,李旭,等.小型果园升降作业平台的设计与试验[J].农业工程学报,2015,31(3):113-121.
[5]张介民.剪叉式升降机构液压缸驱动力计算[J].工程机械,1990,(12):18-22.
[6]章宏甲,黄谊.液压传动[M].北京:机械工业出版社,2003.
[7]左健民,王芙蓉,等.液压与气压传动[M].北京:机械工业出版社,2002.
[8]雷天觉.液压工程手册[M].北京:机械工业出版社,1990.
[9]GB/T2348-2001,液压气动系统及元件缸内径及活塞杆外径[S].
[10]成大先,王德夫,姬奎生,等.机械设计手册[M].第五版.北京:化学工业出版社,2008.
[11]於又玲,刘明春,曾志钢,等.剪叉式升降机液压系统的设计[J].机床与液压,2008,(11):25-26.
[12]杨林,杨洋.扒渣机液压系统设计与仿真分析[J].机床与液压,2013,41(20):82-86.
[13]赵丽梅.大型自动翻转机液压系统设计[J].机床与液压,2011,(2):71-73.
[14]沈文龙,薛金林,张永.农业车辆电控液压转向系统的设计[J].湖南农业大学学报:自然科学版,2014,40(3):325-330.
猜你喜欢
中国民间疗法(2021年5期)2021-06-09 09:21:08
机械工程与自动化(2020年4期)2020-08-25 02:06:58
制造技术与机床(2019年7期)2019-07-22 03:43:08
制造技术与机床(2019年7期)2019-07-22 03:42:28
森林工程(2018年4期)2018-08-04 03:23:38
制造技术与机床(2017年8期)2017-11-27 02:10:01
小学生导刊(2017年15期)2017-05-17 05:44:09
航天工业管理(2017年4期)2017-05-12 01:16:35
棋艺(2016年4期)2016-09-20 06:15:27
中国塑料(2016年3期)2016-06-15 20:30:00