基于Magic Formular轮胎模型的整车稳定性仿真研究
2015-03-21 03:18刘文文张沙沙段红霞王瑞华
汽车零部件 2015年12期
刘文文,张沙沙,段红霞,王瑞华
(1.长城汽车股份有限公司技术中心,河北省汽车工程技术研究中心,河北保定 071000;2.重庆交通大学机电与汽车工程学院,重庆 400074)
基于Magic Formular轮胎模型的整车稳定性仿真研究
刘文文1,张沙沙2,段红霞1,王瑞华1
(1.长城汽车股份有限公司技术中心,河北省汽车工程技术研究中心,河北保定 071000;2.重庆交通大学机电与汽车工程学院,重庆 400074)
在分析整车结构及动力学特性基础上,构建十四自由度整车非线性动力学模型。采用Magic Formular模型提高轮胎在极限值外置信度和健壮性,精准描述车辆在各种工况下运动特性。同时基于虚拟样机技术建立ADAMS整车模型,结合MATLABSimulink联合仿真实验对整车运动特性进行分析。仿真结果表明:车辆模型能够保持对样车运动状态快速响应及跟踪一致性。
整车模型;非线性;Magic Formular轮胎模型;联合仿真
0 引言
随着虚拟样机技术的快速发展,建立精确描述轮胎力学特性的模型成为汽车动力学仿真研究首先要解决的问题。三自由度操稳模型用于研究方向盘转角输入下车辆运动轨迹,评价操纵稳定性。七自由度整车模型用来研究路面激励下车身垂向加速度特性,评价行驶平顺性。而实际行驶中,某一单独工况下车辆模型已无法满足仿真研究需求[1-4]。
文中建立一种适用复杂行驶工况且精度高的整车模型。基于Magic Formular模型研究不同工况下轮胎响应特性,同时结合虚拟样机技术建立ADAMS整车模型,精准分析车辆运动特性。最后通过ADAMS和MATLABSimulink联合仿真实验对整车操控特性进行分析,结果表明基于Magic Formular轮胎模型的整车仿真参数可与样车实际行驶状态保持一致。
1 整车非线性动力学模型建立
整车动力学模型的建立是进行车辆操作性能仿真分析基础。文中建立动力学模型时,首先对其进行适当简化以方便建模:
(1)整车由轮胎、底盘及车身等部分组成,整车质量分为簧载质量和与之弹性连接的前后4个非簧载质量。
(2)假定轮胎与地面实时接触,忽略轮胎滚动过程中行驶阻力、路面坡度、空气动力学等环境因素影响。
(3)忽略轮胎及选型变形对车辆操作稳定性影响。
根据以上假定建立如图1所示的包括车辆纵向、侧向、垂向、横摆、侧倾、俯仰运动和4个轮胎的旋转及垂向振动在内的十四自由度整车非线性模型[5]。
根据车辆动力学及运动学特性将整车分为簧载质量、非簧载质量及车轮等部分,受力状态如图2所示。
假设车辆倾角、俯仰角很小,可得车辆十四自由度动力学动力学方程如下:
纵向运动:
(1)
横向运动:
(2)
横摆运动:
(3)
侧倾运动:
(4)
俯仰运动:
(5)
车身及车辆垂向运动;
(6)
(7)
式中:u、v、ψ、θ、φ、δ分别为车辆纵向/侧向速度、横摆角、俯仰角、侧倾角及转向轮转角;Fxi、Fyi(i=1,2,3,4)分别为轮胎纵向和侧向力,车身各参数的含义见整车参数表。
2 轮胎非线性动力学分析
轮胎模型精确度对车辆操作稳定性、行驶平顺性等动力学特性分析起到至关重要影响。常用模型有郭孔辉院士的全工况统一轮胎模型、PACEJKA教授的Magic Formular模型、SWIFT轮胎模型等[6]。
Magic Formular模型采用三角函数的组合公式拟合轮胎试验数据,该模型在侧向加速度不大于0.4g、侧偏角不大于5°情景下对常规轮胎具有很高拟合精度,在极限值外也具有较好置信度和健壮性。其输入输出变量关系如图3所示。
“魔术公式”其一般表达式为:
Y(x)=Dsin{Carctan[B(x+sh)-E(B(x+sh)-arctan(B(x+sh)))]}+sv
(8)
其中:Y(x)表示侧向力、纵向力或回正力矩,x可表示为轮胎侧偏角或纵向滑移率;sh、sv分别为水平方向漂移、垂直方向漂移;B、C、D、E分别为刚度因子、峰值因子、曲线形状因子、曲线曲率因子,由轮胎垂直载荷和外倾角确定[7]。
(1)纯纵向工况,轮胎纵向力与滑移率关系
Fx0(λ)=Dxsin{Cxarctan[Bx(λ+sh)-Ex(Bx(λ+sh)-arctan(Bx(λ+sh)))]}
(9)

(2)纯纵向工况,轮胎侧向力与侧偏角关系
Fy0(α)=Dysin{Cyarctan[By(α+sh)-Ey(By(α+sh)-arctan(By(α+sh)))]}+sv
(10)

(3)纯纵向工况,轮胎回正力矩与侧偏角关系
Fz0(α)=Dzsin{Czarctan[Bz(α+sh)-Ez(Bz(α+sh)-arctan(Bz(α+sh)))]}+sv
(11)

(4)联合工况下轮胎力学特性
车辆高速转弯或紧急制动情况下,轮胎会产生纵向滑移及侧向侧偏。联合工况下侧、纵向组合滑移率及其纵、侧向力分别为:
(12)
(13)
式中:Fx0、Fy0分别为纯纵向滑移、侧向侧偏下的轮胎纵向力及侧向力。
魔术公式轮胎拟合参数如表1所示。表中,n依次分别代表a、b、c。
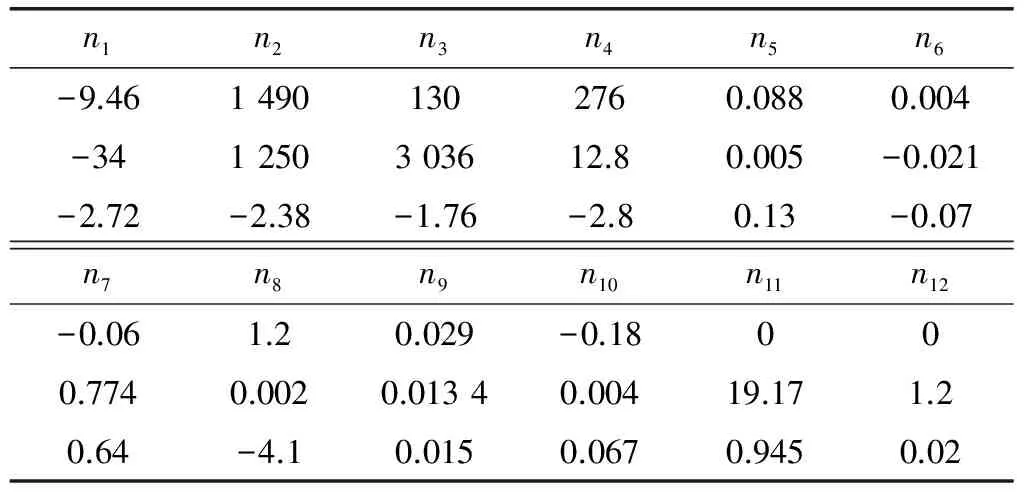
表1 魔术公式轮胎拟合参数
通过式(9)—(13)结合魔术公式的轮胎拟合参数,研究轮胎在各种工况下的纵向、侧向、回正及组合特性。
由图4可知:在滑移率低于±0.18时,纵向力与滑移率呈线性关系。滑移率在16%时制动性能最好,与试验测试时车轮滑移率δ=15%~20%时附着系数达到最大值吻合。
由图5知车辆行驶时,轮胎垂直载荷的变化对侧偏力有明显影响。
当侧偏角不大于5°时,同一载荷下轮胎侧偏力与侧偏角呈线性关系,即Fy0=Cα·α。侧偏角达到一定值时,侧向力达到附着极限保持不变,整个轮胎发生侧滑。
图6所示为侧偏角度很小时,轮胎回正力矩与侧偏角度呈线性关系。同一侧偏角下,轮胎回正力矩随垂直载增大而增加,达到峰值后逐渐减小并趋于平稳。
图7所示为联合工况下,轮胎侧偏角α=5°时,轮胎纵向力随滑移率的增加而增大,当达到理想滑移率便随之减小趋于平稳;轮胎侧向力随滑移率增加而减小,当车辆趋于纯滑动状态时轮胎侧向力几乎为0。轮胎纵、侧向力都随载荷增加而增大,符合实际情况。
3 整车动力学仿真建模
虚拟样机技术能精准分析车辆运动特性。文中参照利用MATLAB所建立的整车非线性动力学仿真模型的参数,分别建立包括悬架、转向、轮胎及车身子系统在内的ADAMS整车模型。
(1)悬架子系统建模
悬架作为车辆的减震器及车轮和车体间传动装置,它对操纵稳定性和平顺性的影响至关重要[8]。采用不等长双横臂独立悬架,悬架左右对称,经抽象简化后如图8所示。
(2)转向子系统建模
选用ADAMS中转向系为参考模型,通过修改硬点坐标完成转向系统建模。
(3)轮胎子系统建模
采用ADAMS共享文件中的Magic Formula模型,通过修改其属性文件创建轮胎模型,主要参数见表2。
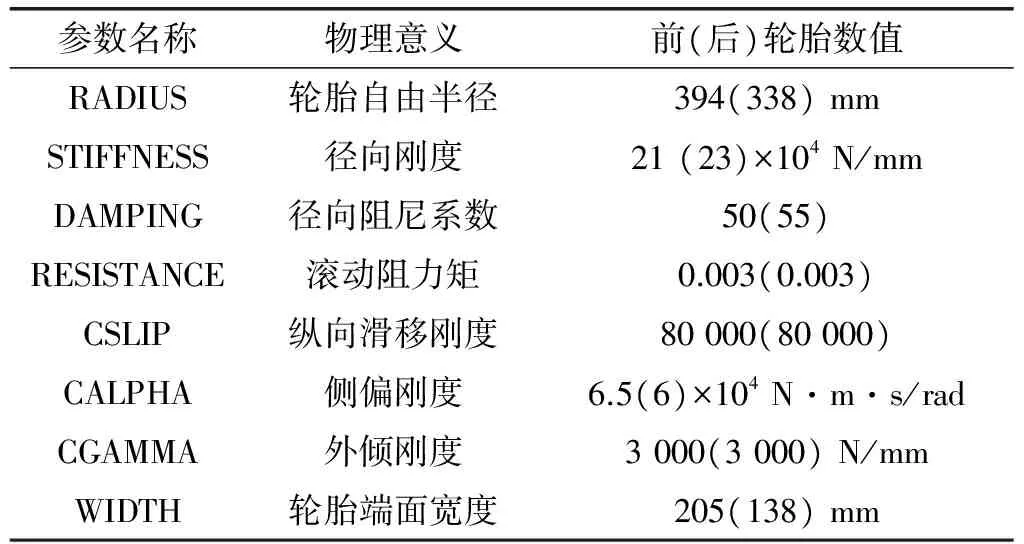
表2 ADAMS中轮胎主要建模参数
(4)整车系统建模
基于前面所建立的悬架系统模型、转向系统模型、车身模型及轮胎模型,在ADAMS/Car中按一定拓扑结构建立整车模型。所有的子系统都直接或间接地与车身相连接[9]。文中对车身及底盘作简化处理,通过定义车身质量、质心位置等参数将其集中在一个集合球体上,确定整车ADAMS模型如图10所示。
4 联合仿真分析
结合整车及轮胎非线性动力学模型,基于MATLAB/Simulink软件搭建包括整车纵向、侧向、垂向、轮胎的车辆仿真模型,主要参数如表3所示。
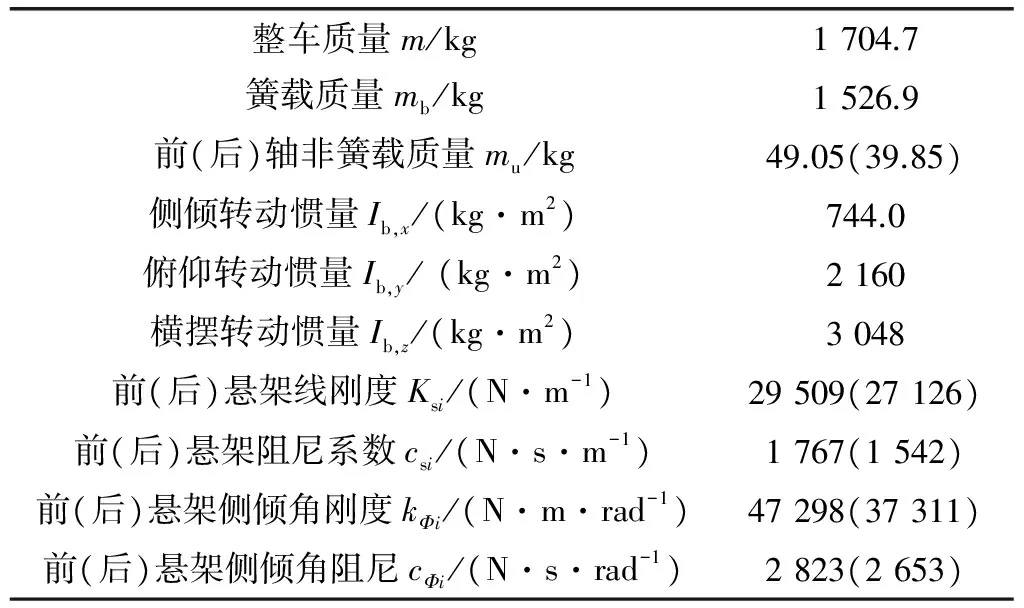
表3 汽车主要仿真参数
仿真分析采用B级路面激励,整车ADAMS模型与汽车非线性模型(见图11)采用相同的初始输入条件。即行驶车速都设定为60 km/h,1 s后施加6°的左转向角,并维持转角不变,通过仿真对比分析车辆的横摆角速度、质心侧偏角、侧向加速度阶跃响应、轮胎受垂直载荷等参数的特性曲线如图12—18所示。
图12—17所示为阶跃输入下,整车纵向、侧向响应特性曲线。可知:所建立的车辆动力学模型的纵、侧向力学特性都可及时、准确、高效地跟踪ADAMS中所建立的整车模型的各目标控制量,横摆角速度、质心侧偏角等运动特性也符合实际转向工况。
由图18可知:两种模型各车轮的垂直载荷变化趋势一致,前、后左轮作为内侧转向轮的垂直载荷都有所降低,外侧车辆垂直载荷有所增加。前、后轮胎垂直载荷的变化情况与实际车辆转向工况相符。由此证明,所建立的十四自由度整车非线性仿真模型可用于后期整车制动、转向等性能分析研发。
5 结束语
(1)建立十四自由度整车非线性动力学模型,通过研究不同工况下轮胎响应特性验证Magic Formular轮胎模型具有较好的置信度和健壮性。同时结合虚拟样机技术建立ADAMS整车模型,分析车辆运动特性。
(2)基于MATLABSimulink搭建的十四自由度车辆非线性仿真模型,采用B级路面激励分析车辆横摆角速度、质心侧偏角、侧向加速度阶跃响应及轮胎受垂直载荷等参数响应特性。
(3)通过ADAMS和MATLABSimulink联合仿真实验对整车操控特性进行分析,结果表明估计值能较好地与实际行驶工况保持一致。
【1】郭孔辉.汽车操纵动力学[M].长春:吉林科学技术出版社,1991.
【2】BAKKKER E,PACEJKAHB.TypeModeling for Use in Vehicle Dynamics Studies[R].SAE Paper 870421.
【3】李刚,解瑞春,李宁,等.基于卡尔曼滤波的车辆状态与路面附着估计[J].华南理工大学学报:自然科学版,2014,42(8):129-130.
【4】林程,周逢军,徐志峰,等.基于补偿自适应控制算法的车辆状态参数估计[J].农业机械学报,2014,45(11):1-3.
【5】梁新成,张军,代鑫,等.微型轿车七自由度模型的仿真分析与试验研究[J].车辆与动力技术,2010(2):41-43.
【6】郭孔辉,金凌鸽,卢荡.统一轮胎模型在车辆动力学仿真中的应用[J].吉林大学学报:工学版,2009,39(9):241-242.
【7】李志明.主动前轮独立转向系统分析与研究[J].计算机测量与控制,2014,22(10):3353-3354.
【8】李翔晟,陈江英,高治凌.汽车麦弗逊悬架性能仿真和优化研究[J].计算机仿真,2014,31(6):201-203.
【9】周泽,李光耀,唐传,等.基于耐久性虚拟试验的车身结构疲劳分析[J].汽车工程,2014,36(3):362-367.
Study on Handling Stability Based on Magic Formular Model for Automotive System
LIU Wenwen1,ZHANG Shasha2,DUAN Hongxia1,WANG Ruihua1
(1.R & D Center of Great Wall Motor Company, Automotive Engineering Technical Center of Hebei,Baoding Hebei 071000,China;2.School of Mechatronics and Automobile Engineering,Chongqing Jiaotong University, Chongqing 400074,China)
The fourteen DOF nonlinear dynamic model of vehicle simulation was built through analyzing the structureand dynamics performance of vehicle model.The model of ADAMS was designed according to virtual prototype technology,Magic Formular was usedto improve the confidence and robustness in the limit tire value. Through the joint simulation of ADAMS and MATLABSimulink,it is shown that vehicle simulation has a better performance in the steering characteristics and stability on vehicle.
Vehicle model; Nonlinear; Magic Formular tire model;Combined simulation
2015-07-27
刘文文(1987—),男,硕士,工程师,主要从事车辆系统动力学及综合控制方面研究。E-mail:liuwenwen2008@sina.cn。
张沙沙,E-mail:hnzhshasha@163.com。
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
军民两用技术与产品(2022年2期)2022-06-01
黑龙江大学自然科学学报(2022年1期)2022-03-29
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
学校教育研究(2020年3期)2020-02-18
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
中学物理·高中(2016年8期)2016-08-08