
导航与控制系统方案设计
——以小型空天飞行器制导为例
2015-03-17 11:54马林
河北省科学院学报 2015年3期
马 林
( 北京航空航天大学,北京 100191)
导航与控制系统方案设计
——以小型空天飞行器制导为例
马 林
( 北京航空航天大学,北京 100191)
现代科技的迅猛发展,军事体系逐渐走向科技化、智能化。此次研究基于小型空天飞行器制导作为研究主体,设计一种符合制导特性的导航与控制系统方案。首先明确方案设计的基本任务需求,对飞行剖面以及各阶段性能要点进行详细阐述;其次,导航与控制系统的构成要素进行协调分析,分析各个模块的构成要素为方案设计提供基础保障;最后,明确基本原理并制定系统设计方案。研究结果表明,导航与控制系统方案设计具备自主性、高可靠性以及高精度等要求。
小型空天飞行器;制导导航;控制系统
2010年美国已经成功发射小型空天飞行器X-37B,并且在完成运行270天后轨道机动任务之后,成功的返回地面,于机场跑道着陆。该事件成为推动小型空天飞行器发展的导火索,各国研究领域关注度较高。该类型能够实现地面侦查、在轨服务、对地打击等多项任务,在军事应用领域中的价值十分显著。站在我国安全战略角度分析,我国也应该展开对小型空天飞行器的研究,提高军事实力以及满足相关技术的先进性。
1 导航与控制系统任务需求及构成
1.1 任务需求分析
在此次研究的开展中,小型空天飞行器自地面到空间轨道中,主要依靠火箭助推完成,在轨道长时间停留之后完成既定目标任务,包括对地观测、轨道机动以及在线维护等,在完成上述任务之后通过自身GNC控制系统进行离轨机动处理,一旦满足高度120km、马赫为25左右时,以大攻角进入到大气层中,到达能量管理高度后,实现减速飞行,进而实现自主着陆[1]。但需要注意的问题是,在该阶段所表现出的动态化参数需要依据空天飞行器自身特性进行纠正与重新设定。经过下滑与拉平,实现合理的接地角度,进而准确的停在跑道之上,关于小型空天飞行器的整个飞行过程如图1所示。
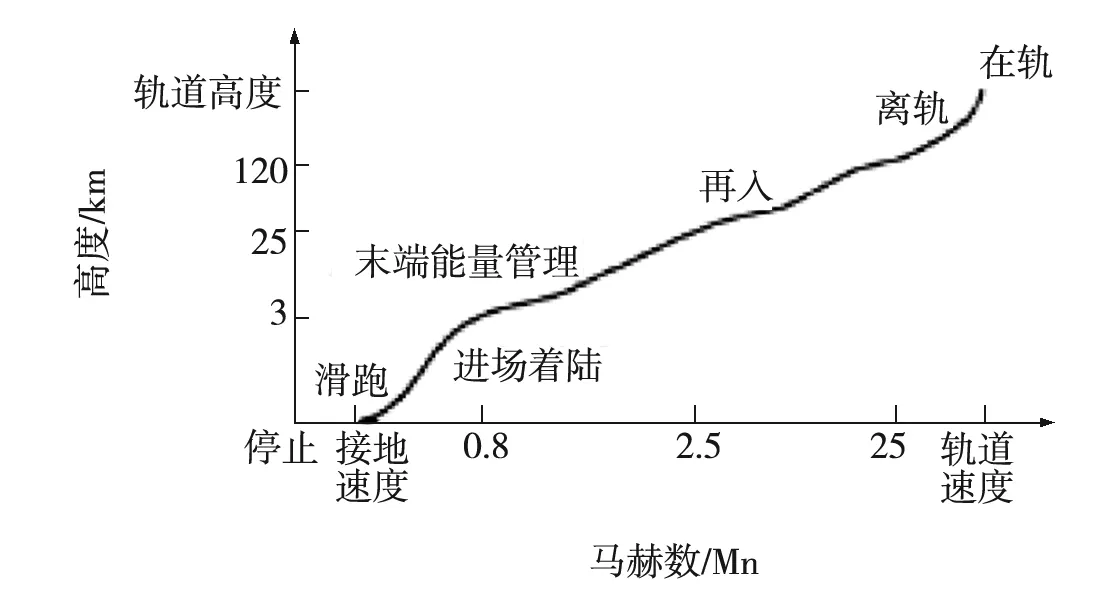
图1 小型空天飞行器飞行任务示意图
依据图1当中所表现出的飞行任务分析,其中涉及到的各个环节主要表现在以下几个方面,包括在轨运行、离轨、再入、末端能量管理、自主着陆以及滑跑等环节。各个环节均具备不同的高度数与马赫数。当然,所表现出的性能状况也存在明显的差异,具体包括以下几个方面:
(1) 在轨段:该阶段,导航系统能够提供精准的运行状态与所处姿态的相关信息,制导系统能够实现自主计算与发出变轨质量与信号;控制系统在该阶段应该最大限度上的满足轨道机动能力以及日常所需基本控制要求,实现高精度控制标准,一旦接收到相关指令,发动机需要对飞行器的运行姿态进行机动处理。
(2) 离轨段:导航凭借自身高精度的要求与特点,制定并控制轨道姿态的相关信息要求;制导系统根据变轨姿态对离轨指令进行制定,满足再入窗要求;控制系统制定整个飞行器机动系统的开关状态,满足时间最优与能量最优的要求。
(3) 再入段:导航系统飞行器位置、速度、姿态等多项信息进行导航信息提供;制导系统控制飞行器热流、动压以及过载等限制,为进入到末端的能量管控端做好基础准备;控制系统需要对飞行器的姿态控制,在角速度作用下进行准确控制,保证控制精度得以提升。
(4) 末端能量管控段:进入到末端能量管控阶段,导航系统依旧需要提供高度、速度、姿态角以及姿态角速度等各项信息;制导系统进入到末端能量管控端,应该对制导轨迹进行准确的测算,实现对轨迹的规划;控制系统通过自动控制,满足减速板速度及能量要求,为进入自主着陆窗口提供依据。
(5) 自主进场段:自主进场阶段,导航系统多速度、下沉率、姿态、舵向等因素准确提供;制导系统对进场角度进行测算,最终得出计算量,明确各项控制指令;控制系统基于气动舵面的基础之上,控制飞行高度与下沉率,减少舵向偏差的产生。
(6) 地面滑跑段:导航系统提供地速、飞行器轮速、舵向偏差、姿态角度等准确数据;制导系统利用主轮差动刹车以及方向舵的控制,协调减速伞、减速板以及气动舵等共同实现减速;控制系统执行控制的过程中,确保滑跑距离以及安全减速的范围,使其能够停留在跑道上。
1.2 小型空天飞行器制导导航与控制系统组成
小型空天航空器导航与控制系统进行方案设计,为满足自主性、高精度以及高度可靠性等基本要求,在实现性能分析之后,得出GNC系统的构成方案,具体构成如图2所示。

图2 空天飞行器GNC系统构成图
依据图2当中所表现出的各项内容,各项系统构成了整个导航与控制系统,能够为制导效果提供系统性的保障。在导航系统当中,包括惯性导航系统、星光敏感器、太阳敏感器、导航系统、雷达高度表、航姿参数系统以及人气数据系统。在制导控制计算机方面,由三套制导控制系统构成,形成一个完整的控制体系[2]。而对于执行机构而言,包括姿态控制、轨道控制以及驱动舵面控制等机构,为整个GNC系统提供功能支持。
2 导航与控制系统基本原理及方案设计
对于小型空天飞行器制导而言,导航与控制系统的设计其基本原理以及方案设计,为空天飞行器的正常运行奠定良好的基础,提升我国理论领域对于该层面的研究进展以及深度,最大限度上提高军事应用价值。
2.1 在轨段原理及方案设计
空天飞行器在在轨段的运行,主要包括惯导系统、太阳敏感器、星光敏感器以及导航系统等。飞行器进入轨道之后,通过惯导系统对初始姿态角进行分析,利用星光敏感器实现高精度的定姿。在完成上述操作之后,运用GNSS导航系统获取导航位置精度,实现自主定轨。运用太阳敏感器位置信息,实现帆板的对日定向。
控制系统的实现通常使用反作用控制系统,消除飞行器与火箭分离所产生的飞行器姿态扰动,最大限度上的减少扰动的产生。针对在小型飞行器导航与控制系统方案的设计,结合精度要求,设定控制参数,对姿态进行调整。
2.2 离轨段原理及方案设计
在离轨段原理方面的分析,主要包括以下几个方面的内容,分别采用惯性导航、星光敏感器、GNSS等导航系统,运用惯性导航与星光敏感器组合并建立高精度姿态基准,实现高精准度的位置信息获取[3]。
在导航与控制系统的设计环节,接受飞行器离轨指令,进而通过RCS对飞行器的预期值实现处理,得到准确的飞行器姿态数据。在各项离轨机动协调处理完成之后,得出离轨指令,让小型空天飞行器实现具体制动,进而保证离轨操作。针对其中存在的姿态偏差进行纠正,对特征参数进行具体处理。
2.3 再入段原理及方案设计
针对空天飞行器再入段的设置,需要运用捷联惯性导航系统与CNSS导航系统,对飞行器的高精度角以及姿态角信息进行处理,提高对飞行器精度的有效控制,得出相关速度的具体信息。
依据飞行器的飞行特点,得出具体的方案设计,共分为两个阶段。再入段的初期阶段,空气稀薄并且大气的密度变差较大,在制导控制的过程中无法实现精准的控制。基于此,在此阶段需要采取准确的制导方式,优化制导方案的具体设计。根据任务需求特点,确定固定的切角与倾斜角。结合飞行器的重力因素能够实现平衡,为飞行器的平稳运行提供基础保障。制导方法也主要采取标准制导法,满足纵向制导的基本要求;再入段的末期,姿态控制方面主要围绕RCS展开,依靠启动舵向使其得以平衡。对于动压而言,一旦动压超出阀值,则应该采取CRS与气动舵向结合的模式,实现两者的复合控制。如果动压依旧高于阀值,则需要采取气动舵面进行系统化的控制。

图3 末端能量管理段轨迹运行图
2.4 末端能量管理段原理及方案设计
对于末端能量的管理段而言,应该结合惯性导航系统、GNSS导航系统以及大气数据等内容,最终得出精准的数据信息,满足高精度位置信息的获取。对于末端能量管理制导方案设计,提供马赫数、动压、攻角以及侧滑角等。末端能量管理段方案设计过程中,应该基于以下四个阶段作为基本的切入点,即S转弯段、搜索飞行段、航向校准段以及着陆前飞行段[4]。该阶段方案设计过程的轨迹运行如图3所示。
基于上述的整个轨迹运行图而言,则应该进行具体阶段性的控制,得出控制手段与控制方案,使得方案设计能够更加完善。S转弯段为减少航行段能量消耗过剩,通过滚转翻转的方法对轨迹偏离进行充分处理;搜索飞行段则依据航向校正飞行,实现向航校准段的圆柱相切,确保校准段能够对准跑道;着陆前飞行段应该调整中心线之间的偏差,满足自主进场着陆。
2.5 自主着陆段原理及方案设计
自主进场着陆段导航系统中包括捷联惯性导航系统、GNSS导航系统、大气数据系统、雷达高度表以及航姿参数系统等[5]。自主着陆的基本原理主要是通过惯性导航系统提供基础的导航信息,大气数据系统提供动压、攻角等数据,雷达高度表则是确保信息精度的提升,航姿参数对系统进行辅助与备份,得出航向姿态。
自主着陆的轨迹主要是经过坡下滑、拉起、浅下滑以及拉平的方式,通过上述四个阶段的处理,得出整个弧线的滑动过程,减少小型空天飞行航空器下沉率,满足着陆要求。通过这样的方式,对飞行器的整个下滑过程进行控制,满足制导标准与要求。
2.6 地面滑跑段原理及方案设计
地面滑跑是整个导航与控制系统方案的最后阶段,其中涉及到的基本原理包括的主体因素为惯性导航、GNSS导航、大气数据导航等。惯性导航提供飞行器在跑道上的位置以及速度等相关信息,大气数据提供相应的马赫数、动压以及攻角等。通过飞行器的轮载传感器,进而对接地信号进行获取[6]。
对导航以及控制方案系统进行设计,控制系统的主轮接触跑道之后,转变改出模式,避免由于滑跑过程中受到机身倾斜产生的损伤,为着陆安全性提供保障。同时,为减缓速度需要通过各项减速工具实现减速,运用差动刹车消除飞行器与跑道的偏离度,为安全着陆提供基础保障。
3 结论
综上所述,针对小型空天飞行器制导的导航与控制系统方案设计,主要结合空天飞行器的飞行流程作为切入点,对在轨段、离轨段、再入段、末端能量管理段、自主进场着陆段以及地面滑跑段等各阶段的基本原理与设计要求进行总结。在方案设计完成投入应用中,取得的效果良好,满足各阶段自主性、可靠性以及高精度的要求,任务要求合理可行。
[1] 朱建文,刘鲁华,汤国建,等.空天飞行器迭代制导初值生成方法研究[J].航天控制,2012,10(03):61-64.
[2] 晁涛,王松艳,杨明.小型空天飞行器制导导航与控制系统方案[J].航天控制,2012,10(05):15-20.
[3] 郭鹏飞,于加其,赵良玉.临近空间高超声速飞行器发展现状与关键技术[J].飞航导弹,2012,5(11):117-121.
[4] 张丽静,刘东升,于存贵,等.高超声速飞行器[J].航空兵器,2010,10(02):13-16.
[5] 黄伟,罗世彬,王振国.临近空间高超声速飞行器关键技术及展望[J].宇航学报,2010,4(05):125-126.
[6] 穆育强,孙晓松,王军权,等.再入飞行器精确制导技术发展分析[J].飞航导弹,2015,4(03):67-70.
The navigation and control system design——case guidance to small aerospace vehicle
MA Lin
(BeihangUniversity,Beijing100191,China)
With the rapid development of modern science and technology,the military system is becoming more and more scientific and intelligent.The study is based on the small aerospace vehicle guidance as the research subject,design a consistent character guidance navigation and control system scheme.Firstly,the basic task requirements of the scheme design,the flight profile and the performance of each stage is described in detail.Secondly,the elements of navigation and control system are analyzed,and the elements of each module are analyzed.The results show that the navigation and control system design has the requirements of autonomy,high reliability and high precision.
Small aerospace vehicle; Navigation guidance; Control system
2015-06-28
马 林(1994-),男,北京人,研究方向:导航与控制.
1001-9383(2015)03-0031-05
TN964
A
猜你喜欢
军民两用技术与产品(2022年7期)2022-08-06
军民两用技术与产品(2022年3期)2022-06-05
军民两用技术与产品(2021年7期)2021-10-13
风机技术(2021年3期)2021-08-05
湖北农机化(2020年4期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
小哥白尼(军事科学)(2018年5期)2018-06-15
现代防御技术(2016年1期)2016-06-01
中国惯性技术学报(2015年1期)2015-12-19
采矿与岩层控制工程学报(2015年3期)2015-12-16
