地面激光扫描仪在铁路工程滑坡监测中的应用研究
2015-03-16 11:34石德斌郑顺义张志刚
铁道勘察 2015年2期
许 磊 石德斌 郑顺义 张志刚
(1.铁道第三勘察设计院集团有限公司,天津 300251;2.武汉大学,湖北武汉 430079)
Research on Railroad Landslide Monitoring Using Terrestrial Laser Scanner
XU Lei1,2 SHI Debin1 ZHENG Shunyi2 ZHANG Zhigang1
地面激光扫描仪在铁路工程滑坡监测中的应用研究
许磊1,2石德斌1郑顺义2张志刚1
(1.铁道第三勘察设计院集团有限公司,天津300251;2.武汉大学,湖北武汉430079)
Research on Railroad Landslide Monitoring Using Terrestrial Laser Scanner
XU Lei1,2SHI Debin1ZHENG Shunyi2ZHANG Zhigang1
摘要采用三维激光扫描技术对铁路工程附近的滑坡体进行监测。对多站扫描数据进行配准、拼接,获取监测区域的完整点云数据;对拼接后的激光点云数据进行地形滤波,获取监测区域的地形数据;最后,对不同期次的点云数据进行对比分析,得出监测区域的变形值。
关键词铁路工程滑坡监测地形滤波点云拼接
目前,滑坡的变形监测主要有以下几种手段:(1)基于传统测量仪器的监测,如GNSS、全站仪、电子水准仪等,在此基础上实现基于网络化和智能化的监测系统。(2)基于各类传感器的监测,如基于地表倾斜监测仪、重力加速度计(Shape Accel Array,SAA)的自动化变形监测,以及其他光纤类型的自动化监测仪器。(3)基于地面激光扫描仪、移动式激光扫描仪等激光扫描技术的变形监测是近年来研究的热点。相对前两种监测手段,利用三维激光点云数据,可以建立三维立体模型来分析铁路附近滑坡体的变形情况。
采用地面激光扫描技术,实现滑坡体的扫描与点云数据拼接。对拼接后的点云数据进行植被滤波,建立扫描数据的八叉树结构。采用Hausdorff Distance算法,对不同期次的监测数据进行对比分析,不同的变形量用不同的颜色值表示,并配上“颜色-变形量”比对表,再将颜色值赋予点云数据,可以直观、形象地表达滑坡的变形量,用不同的结构断面,从细节上表达变形体局部的变形情况。
1基于激光扫描技术的滑坡监测技术设计
1.1 外业数据采集
地面三维激光扫描仪主动发射激光束,经过被测物体的反射,扫描仪接收反射回的激光束,进而计算被扫描物体的三维坐标。受扫描仪有效距离、扫描仪与被测物体之间的通视条件、被测物体的反射率以及地形与周边大气环境的影响,需要多次设站,获得整个监测目标的点云数据。
首先,在滑坡体范围外埋设一组监测基准点。为了获得基准点的高精度平面坐标和高程值,分别对基准点进行平面和高程测量,平面测量采用导线网布设方式、全站仪多测回测角的方式进行观测,精度满足四等导线精度要求;高程采用电子水准仪进行高程观测,精度满足二等水准测量要求。在进行扫描时,把扫描仪靶标安装到基准点的预埋件上,同步获取扫描靶标的激光点云数据。
对滑坡区域进行现场踏勘,选择扫描仪设站位置,并现场标记。扫描仪设站位置的选择要满足以下条件:(1)每站能够扫描到不少于3个靶标。(2)扫描仪设站数量尽可能少。(3)经过拼接的点云,能够覆盖滑坡监测区域。为保证重复扫描测量时获得的监测区域点云分布一致,扫描设站位置应固定,并且每次设站的仪器高度大致相同。外业扫描测站布设如图1所示。
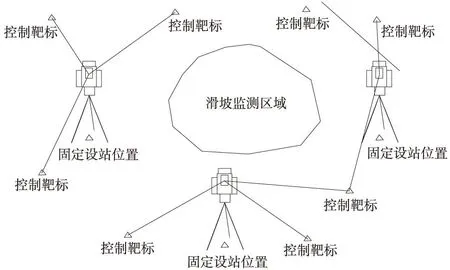
图1 扫描仪设站位置布设示意
1.2 多站点云拼接
地面三维激光扫描仪获得激光点云是相对于扫描仪中心的三维坐标,如果要获得扫描区域完整的点云数据,要利用多次扫描站数据进行配准、拼接。通过对控制靶标点云数据进行拟合,计算靶标中心点的三维坐标,再利用基准点坐标进行坐标转换,坐标转换采用布尔沙转换模型。如式(1)所示,当控制靶标数量多于3个时,通过最小二乘原理,计算转换参数,完成测站坐标的转换。把完成坐标转换的点云进行拼接、分割,即可获得监测区域内的激光点云。
(1)
式中X1,Y1,Z1——原坐标系坐标;
X2,Y2,Z2——目标坐标系坐标;
Tx,Ty,Tz,D,Rx,Ry,Rz——七参数。
1.3 点云数据的滤波
当滑坡体监测区域有植被信息时,需要对植被进行滤波,确保分析的数据只含有地形数据。如果使用的地面激光扫描仪具有多次回波数据,可以利用多次回波数据对数据进行初始滤波,以剔除部分植被信息。对滑坡监测区域内的激光点云建立八叉树(Octree)结构,再根据地形坡度信息,对监测区域进行地形滤波,并对滤波后的区域进行三角化和平滑处理,以获得监测区域内地形数据。
1.4 点云数据的变化检测
采用三维激光扫描仪对滑坡区域进行扫描,获得滑坡区域的多期监测数据,通过内业分析计算,进而获得滑坡区域的变化量。有以下3种方法可以采用:
①在监测体上设置固定的反射目标,利用三维点云数据,提取反射目标的三维坐标信息,通过不同期次的三维坐标比较,获得滑坡监测体上的反射标志变形量。
②将需要对比分析的两期点云数据建立八叉树结构,通过遍历循环本期点云上所有点,搜索在上期点云(参考数据)的最近点,再通过计算两点(本期点与参考期点)之间的距离,反应两期点云的变形量。
③将参考点云建立格网(mesh)模型,通过遍历用作比较分析的点云所有点到mesh模型的最短距离,反应监测体的变形信息(如图2所示)。用作参考期次的点云建立mesh模型,遍历循环对比分析的所有点云到模型的距离方式进行变化监测,可以在建立mesh模型过程中,采用地形滤波的方法,对点云数据进行数据滤波,消除噪声点对监测结果的影响。

图2 基于Hausdorff Distance算法的变形监测
2实例及分析
2.1 项目概况
工程为某铁路车站附近的滑坡体变形监测,数据采集时间为2014年3月至6月,监测范围约0.35 km2。采用RIEGL VZ-1000扫描仪进行分站式扫描,在监测区域外相对稳定的区域埋设12个基准点,共计监测12期数据,每期间隔一周。每期监测扫描3站,通过控制靶标进行拼接、融合(如图3所示)。

图3 扫描仪获取的点云数据
2.2 滑坡变形量计算
对拼接后的点云数据进行地形滤波,消除植被数据,获得监测区域地形点云数据,如图4所示。利用不同期次的地形数据进行对比分析,用不同的颜色值表示监测区域的变形量,并附上颜色对比表,如图5所示。

图4 地形数据滤波

图5 两期监测数据对比分析
2.3 断面测量
在监测区域布设一定数量的监测断面,利用地形滤波后的点云数据,自动搜索断面点,生成断面线。通过不同期次的断面线叠加,获取断面位置处滑坡体变形情况,如图6所示。
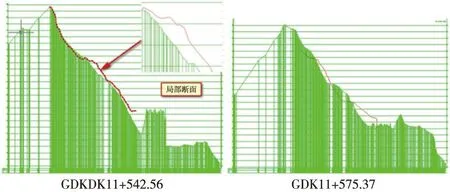
图6 不同期次的断面线叠加
3结论
采用三维激光扫描技术可以快速获取监测目标的三维点云数据,不仅测量精度和监测效率高,可以有效实现铁路工程滑坡变形监测,而且更加全面、直观地反应监测目标的变形情况。通过不同期次数字表面模型的比较来分析具体的滑坡体变形趋势,也为地质专家判读解译滑坡体形变的诱因提供较好的数据模型。
参考文献
[1]罗力.三峡库区滑坡监测GPS统测构网研究及应用[D].武汉:武汉大学,2013
[2]岳建朋.基于地表倾斜变形监测仪器的铁路边坡监测预警研究[D].石家庄:石家庄铁道大学,2014
[3]刘锦程.三维激光扫描技术在滑坡监测中的应用研究[D].西安:长安大学,2012
[4]D Girardeau-Montaut, Michel Roux, Rapha⊇l Marc, Guillaume Thibault. Change Detection on Points Cloud Data Acquired with a Ground Laser Scanner. ISPRS Workshop Lasers Scanning 2005
[5]韩三琪.三维激光扫描仪单点精度的检验及分析[J].铁道勘察,2013(6):9-11
[6]徐进军.地面三维激光扫描仪应用综述[J].工程勘察,2008,22(3):26-27
[7]官云兰,程效军,詹新武,等.地面三维激光扫描仪系统误差标定[J].测绘学报,2014,43(7):732-735
[8]李滨,王汉顺,段奇三,等.点云监测技术在高速公路边坡监测中的应用[J].城市勘测,2014(4):20-26
中图分类号:P225
文献标识码:B
文章编号:1672-7479(2015)02-0011-03
作者简介:第一许磊(1983—),男,2009年毕业于武汉大学摄影测量与遥感专业,在读博士研究生,工程师。
收稿日期:2014-12-29
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
陕西水利(2021年8期)2021-09-15
河北地质(2021年1期)2021-07-21
模具制造(2019年3期)2019-06-06
中国地质灾害与防治学报(2018年3期)2018-07-26
中国公路(2017年18期)2018-01-23
北方交通(2016年12期)2017-01-15
山东青年(2016年3期)2016-02-28
现代营销·经营版(2015年3期)2015-04-20
科技视界(2014年33期)2014-01-02