
时变加权LQT设计方法理论推导及应用
2015-03-15 08:58:20李建平陶呈纲李导
飞行力学 2015年1期
李建平, 陶呈纲, 李导
(1.成都飞机设计研究所 飞控部, 四川 成都 610091;2.西北工业大学 航空学院, 陕西 西安 710072)
时变加权LQT设计方法理论推导及应用
李建平1, 陶呈纲1, 李导2
(1.成都飞机设计研究所 飞控部, 四川 成都 610091;2.西北工业大学 航空学院, 陕西 西安 710072)
利用矩阵运算公式和极值原理,对时变加权性能指标下的线性二次型跟踪器(LQT)迭代方程进行了理论推导。以F-16飞机为例,利用飞行控制经验构建俯仰速率控制系统线性框图。在MATLAB/Simulink环境下,针对两种时变加权性能指标和一种定常加权性能指标,利用多变量优化算法完成了一个状态点的控制律参数设计,并进行了时域和频域对比分析,初步验证了时变加权LQT设计方法的工程可行性和有效性。
线性二次型跟踪器; 线性二次型调节器; 时变加权性能指标; 控制律; 多变量优化算法
0 引言
过去四十多年,现代多变量控制律综合与分析技术获得极大发展。然而,由于传统的现代控制理论设计方法需要选择较多的设计参数,且这些参数往往不具备直观的物理含义,使得工程设计人员至今仍是很勉强地接受和应用这种新技术。
时变加权LQT设计方法继承了传统控制方法较为直观的优点,在依据工程经验所选控制系统结构的基础上,能更快地同时求解所有反馈增益,避免了传统方法逐个回路试凑设计的繁琐过程,还兼顾了工程设计人员的实践经验。相比于常见的二次型,该方法采用的时变加权性能指标具有更加通用的形式,简化了状态加权阵和控制加权阵的选取,只需试凑选取少量设计参数。这些优点使其有望成为方便快捷、工程实用的多变量飞行控制律设计方法。文献[1]给出了时变加权性能指标LQT输出反馈设计方程,但未给出推导过程,也未在其他文献中发现其推导过程[2-9]。
本文利用矩阵运算求导公式和极值原理,对此设计方程进行了理论推导,并以F-16飞机为被控对象,进行了俯仰速率控制系统的参数设计,并对设计结果进行了时域和频域对比分析,初步验证了该方法应用于工程设计的有效性和可行性。
1 时变加权LQT方法
1.1 阶跃指令跟踪器问题
图1描述了一个具有期望补偿器结构的控制系统。具体到飞行控制系统中,“被控对象”对应飞机本体、作动器等;“性能输出”为期望控制的飞机响应,如俯仰速率;“补偿器”对应设计人员依据工程经验构造的控制结构,包含滤波和积分环节等。

图1 具有期望补偿器的控制系统Fig.1 Control system with desired compensator
将补偿器与被控对象的状态变量合并为x,则该控制系统可定义为:

(1)
其中:
u=-[KL]×[yv]T
再考虑输入与输出反馈成比例u=-Ky,则整个闭环系统的状态方程可表示为:

=(A-BKC)x+(G-BKF)r
(2)
在此基础上,考虑阶跃输入响应的跟随问题,可以推导并转化为如下偏差系统的调节器问题[1]:
(3)
(4)
而跟踪误差的稳态值为:
(5)
1.2 性能指标及设计方程推导
定义一个包含时间加权分量的性能指标:
(6)

(7)

假设存在Pk,使得
则有:
(8)
其中:
式中:Ωk为k维积分区域;dτk=dτk-1dτk-2…dτ0。

(9)
(10)

(11)
(12)
同理,迭代可得:
(13)
因此,存在一组{P0,P1,P2,…,Pk}满足:
(14)
至此,时变加权性能指标的优化问题(8)被转化为以一组李雅普诺夫方程(14)为等式约束条件的、不含时变加权项的常规优化问题:
(15)
为推导更快速的基于梯度的优化算法,定义下列哈密顿函数:
(16)
式中:Si为拉格朗日因子、半正定对角矩阵。
(2H)对Pi求偏导,得另一组李雅普诺夫方程:
(17)
(2H)对K求偏导:
(18)
则式(18)中右侧的三项可分别展开为:
其中:

式中:[1ij]表示该矩阵的第(i,j)个元素为1,其余元素为0;Kij为矩阵K的第(i,j)个元素。
综上所述,使H对K的偏导为零的条件为:
(19)
式(14)、式(16)、式(17)和式(19)构成时变加权性能指标下的线性二次型输出反馈设计优化迭代方程。
2 俯仰速率控制律设计与分析
2.1 俯仰速率控制系统
以F-16飞机为例,利用时变加权LQT输出反馈设计方法进行纵向俯仰速率控制律线性设计。选取设计状态点参数为:高度为海平面;Ma=0.45,对应表速VC=550 km/h。依据工程经验构造出俯仰速率控制系统框图如图2所示。

图2 F-16飞机俯仰速率控制系统Fig.2 Pitch rate control system of F-16
2.2 飞机和控制系统动态模型
飞机采用二阶线性模型,升降舵作动器模型采用二阶模型。包含飞机、作动器、滤波器和积分器的增广状态变量x和输出变量y为:
(20)
系统动态模型利用状态方程矩阵来描述,参数见表1和随后的矩阵。

表1 系统参数取值Table 1 Parameters of control system
A=[A1Α2]
B=[000wact20000]T
G=[00000100]T
F=[0001]T
H=[0000000cr2d]T
A1=
作动器和滤波器参数根据工程经验选取。控制输入u为升降舵指令:
(21)
2.3 性能指标和控制增益的确定
考虑三种性能指标,分别对应性能指标(6)中的k=2,1,0。前两种为时变加权指标,设计时选择P=HTH,Q=0,R=ρI,则只需要调节一个设计参数ρ,即
(22)
而第三种为定常加权指标,设计时需要调节两个设计参数ρ和Q。
根据经验,K的初值取[-0.1,-0.1,0.5,0.1],能够使闭环系统稳定。对于k=2,1,分别选取不同ρ值,利用MATLAB平台下的无约束多变量寻优算法求解设计方程得到最优增益。然后进行闭环系统线性阶跃响应、开环系统频率响应及稳定裕度分析,并进行等效系统拟配获得短周期频率、CAP、阻尼比等飞行品质指标,从中选取满意的设计结果。对于k=0,积分器输出加权系数固定为Q=100I。对于k=1,2利用同样方法获得满意的设计结果。表2 给出了三种指标对应的设计结果,三种情况的迭代优化过程都在数秒内收敛。由表2可以看出,k=2的迭代次数最少,最终的性能指标也最小,k=1次之,k=0最差。

表2 优化设计结果Table 2 Optimized design results
2.4 数字仿真与分析
飞机模型使用四阶线性模型,状态变量x和输出变量y分别为:
(23)
飞机状态方程和输出方程如下:

(24)
其中:

B=[0.173 7-0.002 15-0.175 550]T
D=[0000-0.048 52]T
其他模型与设计模型相同。
图3给出了闭环系统单位阶跃响应。无论是快速性、控制误差,还是阻尼特性,k=2对应的时变加权结果最好;k=1稍差,但与k=2无本质差别;k=0最差。
图4为开环系统尼克尔斯图,断开点位于升降舵指令处。可以看出,三个系统的稳定裕度都满足规范要求。但k=0的尼克尔斯图进入2.3 dB圆,系统的动态特性较差。
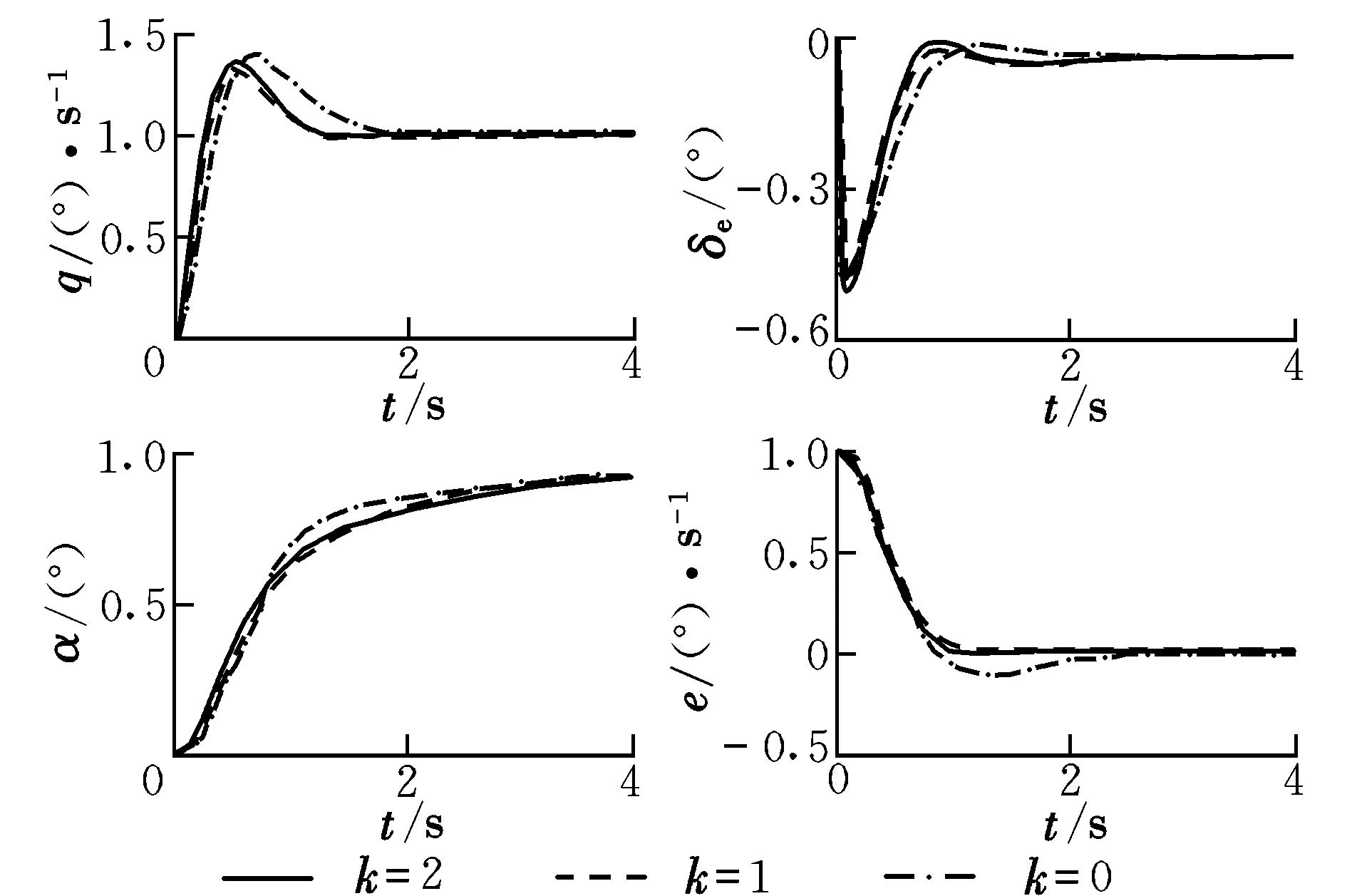
图3 闭环系统单位阶跃响应Fig.3 Unit step response of closed-loop control system

图4 开环系统尼克尔斯图Fig.4 Open-loop Nichols diagram
通过等效系统频域拟配方法,获得三个系统对应的飞机纵向短周期频率ωsp、操纵期望参数Ke和阻尼比ζsp。飞行品质指标见表3。可以看出,计算结果均满足一级品质要求,k=2,1的结果位于最优区。

表3 飞行品质指标计算结果Table 3 Results of flight quality indexes
3 结束语
本文利用矩阵运算公式和极值原理对时变加权性能指标下的LQT设计方程进行了理论推导,并以F-16飞机为例进行了俯仰速率控制系统单个状态点的参数设计,初步验证了该方法的工程可行性和有效性。
本文仅就纵向单操纵面飞机的控制律进行了应用研究,下一步希望推广应用于多操纵面高度静不安定飞机的飞行控制律设计。
[1] Stervens B L,Lewis F L.Aircraft control and simulation[M].USA:John Wiley & Sons Inc,1992:360-435.
[2] 马启鑫,黄一敏.输出反馈在飞行控制律设计中的应用研究[J].杭州电子科技大学学报,2005,25 (1):82-86.
[3] 郭锁风,申功璋,吴成富,等. 先进飞行控制系统[M].北京:国防工业出版社,2003:1-42.
[4] 谭毅伦,闫杰.基于随机鲁棒设计的高超声速飞行器线性二次型控制[J].计算机应用,2011,21(6):1723-1732.
[5] 童新,宋召青,于华国.基于遗传算法的线性二次型最优控制器设计及仿真[J].航天控制,2013,31(5):8-12.
[6] 廖志刚,章卫国,刘小雄,等.基于ALQ方法的飞行姿态控制系统设计[J].计算机仿真,2012,29(2):45-49.
[7] 于广亮,张保会,谢欢,等.基于逆系统方法的非线性最优控制[J].电力自动化设备,2008,28(6):1-5.
[8] 齐晓慧,杨志军,吴晓蓓.简单自适应鲁棒飞行重构控制律研究[J].兵工学报,2009,30(12):1733-1737.
[9] 赵彦娟.线性系统二次型性能指标的模糊最优控制[D].南京:南京理工大学,2009.
(编辑:李怡)
Derivation and application of LQT design method with time-dependent-weighting performance index
LI Jian-ping1, TAO Cheng-gang1, LI Dao2
(1.Department of Flight Control, CADI, Chengdu 610091, China;2.School of Aeronautics, Northwestern Polytechnical University, Xi’an 710072, China)
Using the matrix and extreme principles, the iteration equation focusing on Linear-Quadratic-Tracker (LQT) design method with time-dependent-weighting performance index was inferred. Pitch rate control system of F-16 was designed based on the flight control experience. Using the MATLAB/Simulink tool and multivariable optimization algorithm, LQT controllers were designed at a single state point with two different time-weighting performance indexes and a constant weighting performance index, the time domains and frequency domains responses were analyzed. The results verified that the feasibility and efficacy of time-weighting LQT method when applying to engineering design.
linear-quadratic-tracker; linear-quadratic-regulator; time-dependent-weighting performance index; control law; multivariable optimization algorithm
2014-04-17;
2014-09-17;
时间:2014-11-18 16:56
成都飞机设计研究所创新基金资助(GCDSC170)
李建平(1963-),男,河南偃师人,研究员,硕士,主要从事飞行品质和飞行控制研究。
V249.1
A
1002-0853(2015)01-0092-05
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:08:00
石油沥青(2021年1期)2021-04-13 01:31:08
中学生数理化·高一版(2021年2期)2021-03-19 08:32:06
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
智富时代(2017年4期)2017-04-27 17:08:47
制冷技术(2016年4期)2016-08-21 12:40:30
广东石油化工学院学报(2016年6期)2016-05-17 05:17:43
测绘科学与工程(2016年4期)2016-04-17 06:51:14
中国铁道科学(2015年4期)2015-06-21 06:46:08
电测与仪表(2014年16期)2014-04-22 05:20:20
