
一种静止同步补偿器的滑模控制研究
2015-03-15 11:08易志威
通信电源技术 2015年1期
易志威,张 敏
(湖南科技大学信息与电气工程学院,湖南湘潭411201)
静止同步补偿器(简称STATCOM)在无功补偿领域应用得非常广泛[1]。这种补偿器(STATCOM)是无功补偿技术的主力军。STATCOM的优点在于能够克服传统无功补偿装置以及谐波治理装置所具有的缺点,更好地实现了动态无功补偿,为电力网络和用电负荷提供了保障。STATCOM实际上是以瞬时无功功率的概念为基础,由自换相逆变器和小容量储能元件构成的无功补偿装置[2]。
实际上有两种不同的STATCOM,一种是电压源逆变型(VSI)的STATCOM,另一种是电流源逆变型(CSI)的STATCOM[3]。现在应用最广泛的还是电压源逆变型的STATCOM。目前,针对STATCOM,一些业内学者研究了较为先进的控制方法,其中就有文献[4]的模糊PID控制,以及文献[5]的通过极点配置的反馈线性化。而本文将对静止同步补偿器进行一种双幂次趋近律滑模控制的研究。
滑模控制还有另外一个名字,即变结构控制。归根到底它也是非线性控制方法中的一种,具有控制的不连续性特点。这种方法最大的优点是滑动模态的设计与对象参数及扰动无关,物理实现简单,响应快速。故本
文将采用一种滑模控制来对静止同步补偿器进行研究。
1 STATCOM的建模分析
在图1所示的STATCOM中直流电容C的作用是为逆变提供稳定的直流电压,需从电网吸收部分能量,以便维持自身电压稳定,交流侧电抗L的作用是对STATCOM发出的无功电流进行滤波;R为回路等效电阻。由于是并联型装置,相比串联型无功补偿装置,它的安装更加灵活,损耗更小[6]。
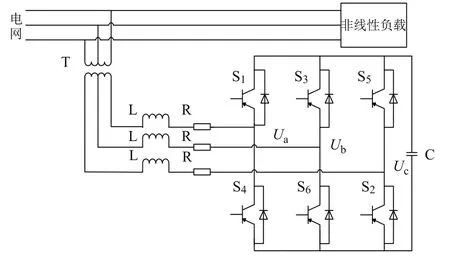
图1 STATCOM电路结构原理图
根据图1写出STATCOM三相KVL方程组:

由能量守恒关系可以得出:

用Park变换将前面的式子变换到同一坐标系下,将式(1)和式(2)重写为:

建立dq坐标系,整理得:
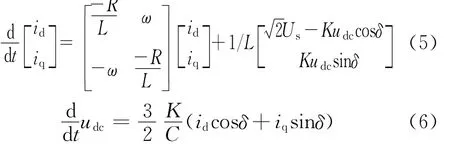
转换为矩阵,得到数学模型[7]

2 无功电流检测
STATCOM是一种动态补偿装置,无功电流检测环节对其而言是尤为重要的。它对检测的灵活性、快速性、准确性有一定的要求。在无功电流检测环节采用的是ip、iq检测法[8],如图2所示。
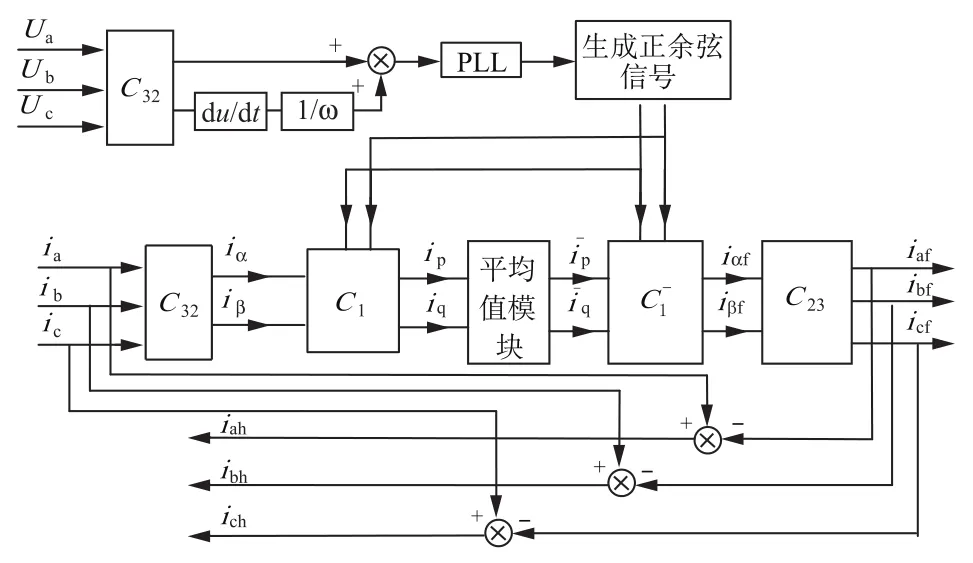
图2 i p、i q 检测法
在ip、iq检测法中,需要通过锁相环(PLL)和正余弦信号发生器来得到与A相电网电压同相位的正余弦信号,如图3所示。根据瞬时无功功率理论可知,应该通过PARK变换,把负载电流解耦成基波分量和谐波分量;断开iq通道,得到的指令电流包含基波无功和谐波,经低通滤波器(LPF)滤波得出基波分量。
3 滑模控制的设计
滑模变结构(SMC)一般有以下几种设计方法:
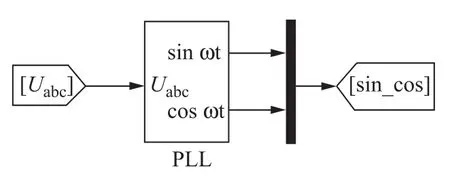
图3 锁相环模块的设计
(1)常值切换控制:

(2)函数切换控制:

这是以等效控制ueq为基础的形式。
(3)比例切换控制:
由于系统存在空间与时间上的延迟滞后,模态必然会出现一定程度的抖动,抖动的问题是影响滑模控制广泛应用的主要障碍[9]。我国专家高为炳提出了一种趋近律的概念来抑制抖振。
高为炳教授提出了一系列趋近律的概念,例如等速趋近律、指数趋近律和幂次趋近律,消弱了系统的抖振,较好地实现了滑动模态。它们有着共同的特点:需要恰当地选取参数以确保趋近段特性。它们也有着各自的缺点,例如:等速趋近律趋近速度很慢;指数趋近律在接近模态时抖动是比较大的;幂次趋近律虽然整体性能较好,但是在状态远离模态的那一段,其速度过小,时间过长。
现采用一种双幂次趋近律[10],比传统趋近律拥有更好的运动品质和速度。如式(8)所示:

式中,α>1,0<β<1,k1>0,k2>0。在远离滑动模态的那个阶段,也就是当|σ|>1,式中的-k1|σ|αsgn(σ)这一部分起决定性作用;而当|σ|<1时,后面的-k2|σ|βsgn(σ)起决定性作用;而-k3σ2可以缓解系统在分界点的不连续性,削弱系统抖振。这几部分的配合,良好地确保了滑模的运动品质。
4 仿真研究
为了验证这种双幂次趋近律滑模控制方法在STATCOM中的有效性,在Matlab/si mulink中搭建仿真模型,系统电压定为380 V,设定STATCOM接入点的电压为220 V,Udc为800 V,连接电阻R=0.05Ω,电感L=0.002 H,直流电容C=0.004 F。图4所示为无功功率变化情况,从0.01 s到0.1 s之间,无功功率波动,而图5则是负载电流在这段时间的变化曲线,在0.1 s后得到了有效的控制。

图4 无功功率变化
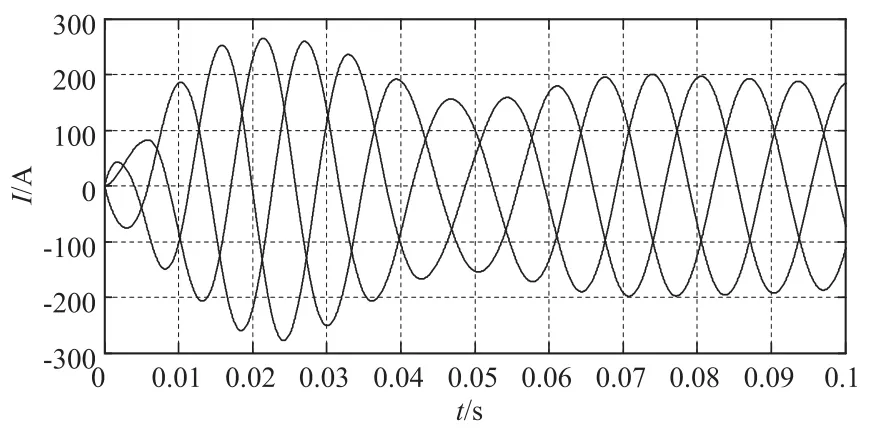
图5 负载电流的变化
5 结束语
本文建立了STATCOM在ABC三相坐标系下的数学模型,再通过PARK变换将ABC三相坐标转化为dq旋转坐标,对无功电流进行快速准确的检测。采用一种双幂次趋近律滑模控制,在Matlab/si mulink中搭建仿真模型,仿真结果表明了该控制器的有效性,STATCOM的系统稳定性较好。
[1] 罗 安,欧剑波,唐 杰,等.补偿配电网电压不平衡的静止同步补偿器控制方法研究[J].中国电机工程学报,2009,29(6):55-60.
[2] 吴文辉,刘会金.静止同步补偿器(STATCOM)技术的研究现状与发展[J].华东交通大学学报,2005,22(2):89-90.
[3] 王 刚.电流源逆变器型STATCOM技术研究[D].沈阳:沈阳工业大学,2007:6-7.
[4] 林媛媛.基于模糊PI控制器的STATCOM研究[D].辽宁:辽宁工程技术大学,2010.
[5] 朱 夏,王 杰.凸极式发电机励磁与非理想STATCOM的协调控制[J].电网与清洁能源,2013,29(1):58-59.
[6] 佟 雷.基于滑模变结构控制的静止同步补偿技术研究[D].哈尔滨:哈尔滨工业大学,2011.
[7] 茅靖峰.静止同步补偿器滑模变结构控制及数字系统设计[D].镇江:江苏大学,2008.
[8] 李 超,公茂法,李岚冰.ip-iq谐波和无功电流检测法的改进及 MATLAB仿真[J].电气时代,2014,4:78.
[9] 刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2012.
[10]张合新,范金锁,孟 飞,黄金峰.一种新型滑模控制双幂次趋近律[J].控制与决策,2013,28(2):290.
猜你喜欢
导弹与航天运载技术(2022年2期)2022-05-09
建材发展导向(2021年19期)2021-12-06
湖南电力(2021年4期)2021-11-05
统计与决策(2019年7期)2019-05-05
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年2期)2017-05-17
北京航空航天大学学报(2016年7期)2016-11-16
哈尔滨理工大学学报(2016年3期)2016-11-05
通信电源技术(2016年1期)2016-04-16
