
装甲车辆发电机故障辨识器研究与设计
2015-03-15 11:08黄捷音李光升谢永成
通信电源技术 2015年1期
黄捷音,李光升,谢永成,魏 宁
(1.装甲兵工程学院控制工程系,北京100072;2.装甲兵工程学院外训系,北京100072)
0 引 言
装甲车辆发电机是装甲车辆电源系统的重要组成部分,为保障全车用电设备正常工作,发挥着举足轻重的作用,其任何一种故障,都可能导致全车用电设备的工作不正常或停止工作。然而在我军现行发电机故障诊断模式中,发电机状态监测能力还比较低下,检测手段单一,缺乏一定的推理分析能力[1]。尤其是不易检测、故障样本少的结构单元,其状态监测能力不足的问题尤为明显,由于传统故障诊断方法难以实施,需设置专用故障辨识器进行故障诊断。
1 研究对象
在某型装甲车辆发电机工作过程中,旋转励磁机在发动机带动下工作,随发动机转速变化而变化,旋转整流器更加容易出现故障。根据统计显示,旋转整流器故障约占该型发电机故障总和的五分之一。其在发生短路故障时,发电机迅速受损,故障特征明显;而在发生开路故障时,发电机在此状态下继续使用,故障特征并不显著,使用单位、维修单位均不易察觉,致使供电质量下降。针对这一问题,选取某型装甲车辆发电机旋转整流器开路故障为研究对象,建立专用故障辨识器,对确保发电机供电质量,提高发电机故障诊断能力具有重要意义。
2 故障特征分析
目前已经有许多学者对桥式整流器的故障诊断进行了相关研究:鄢仁武等[2]通过研究发电机的输出电压,对其进行谐波分析,进而获取整流器故障特征信号,实现对整流器的故障诊断分析;邵兵、程延伟、康洪铭等[3,4,5]采用小波神经网络提取整流器故障特征,利用支持向量机等进行模式辨别故障诊断。然而,对于该型发电机旋转整流器故障,受限于旋转整流器安装于发电机内部,其直流侧电压不易测量的现状,故不便将整流输出电压直接作为故障辨识中的故障特征信号,需再考虑其他故障特征信号。在发电机工作运行中,考虑到旋转整流器的输出负载为励磁线圈,根据发电机工作原理及结构关系,可以选取励磁绕组电流作为发电机整流二极管故障的特征信号,进行故障辨识研究。首先,建立旋转励磁机Matlab仿真模型,如图1所示。
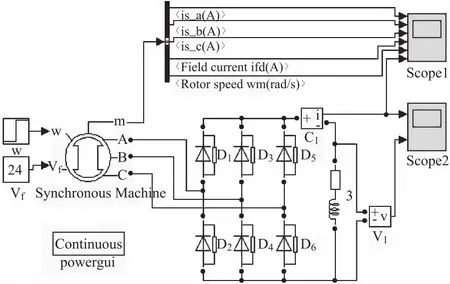
图1 旋转励磁机仿真模型
未注入故障状态下,Matlab仿真模型输出励磁电流波形和谐波,如图2、图3所示。借助实验室搭建的发电机故障模拟诊断平台,对仿真波形的有效性进行验证,图4、图5为平台实测波形及谐波幅值。通过对比实测波形可以发现,励磁机Matlab仿真模型输出的仿真波形和幅值图与平台获取的励磁电流波形与幅值图基本一致且特征明显,表示仿真模型是准确可行的,下一步可通过在励磁机Matlab仿真模型上设置故障实现故障特征信号的获取。
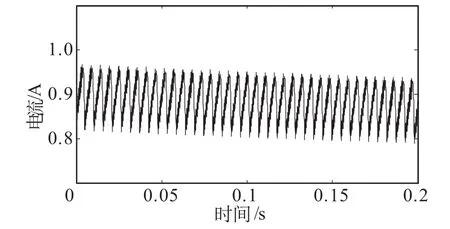
图2 无故障时励磁电流波形图
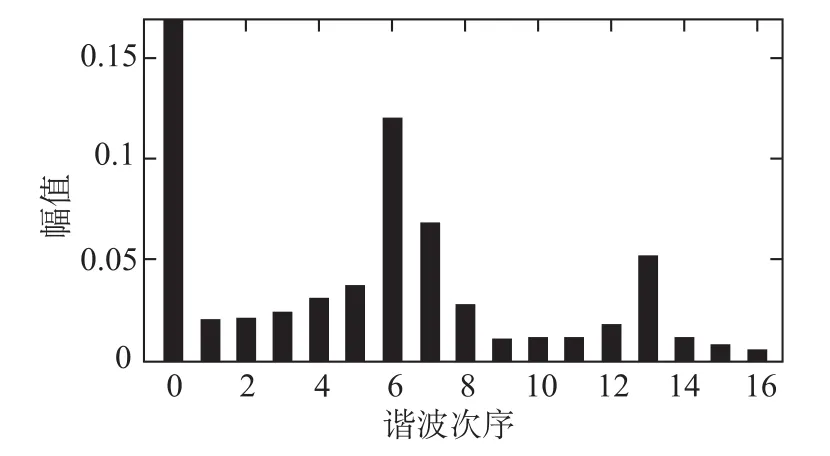
图3 无故障时励磁电流谐波幅值图
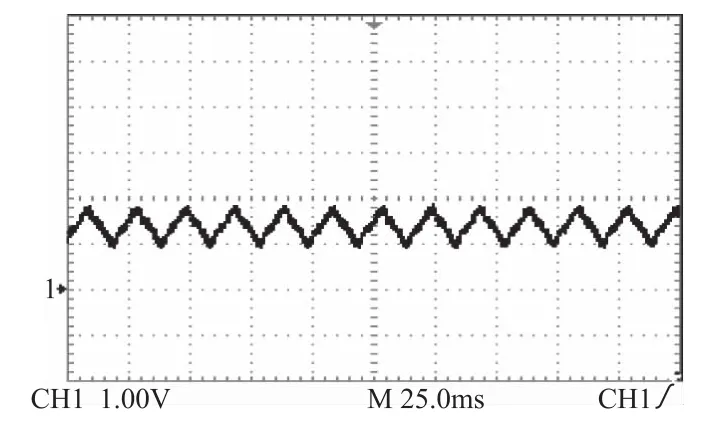
图4 实测励磁电流波形图
将旋转整流二极管开路故障具体分为以下5种:故障模式1:无故障;模式2:单个二极管开路;故障模式3:同相两个二极管开路;故障模式4:同半桥两个二极管开路;故障模式5:既不同相也不同半桥两个二极管开路。则可得到各个模式下的谐波分析图如图6~图13。

图5 实测励磁电流谐波幅值图
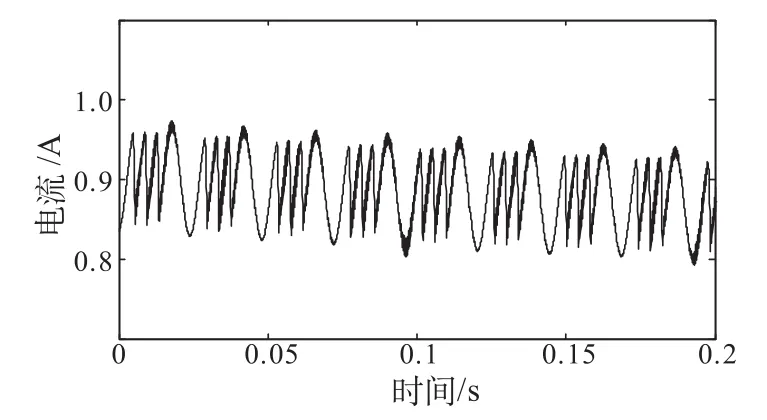
图6 故障模式2励磁电流波形图
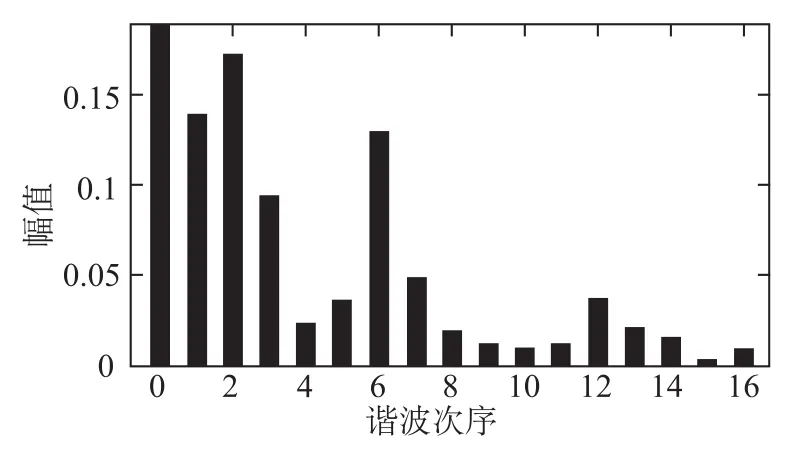
图7 励磁电流谐波幅值图
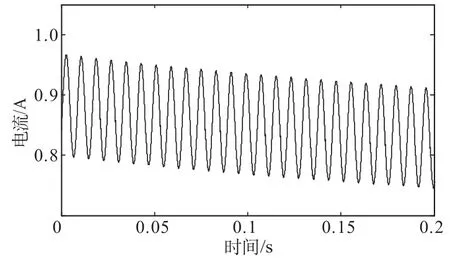
图8 故障模式3励磁电流波形图
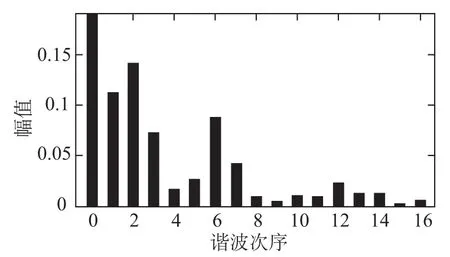
图9 励磁电流谐波幅值图
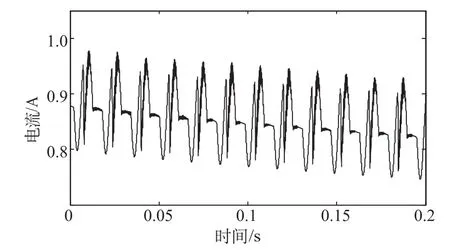
图10 故障模式4励磁电流波形图
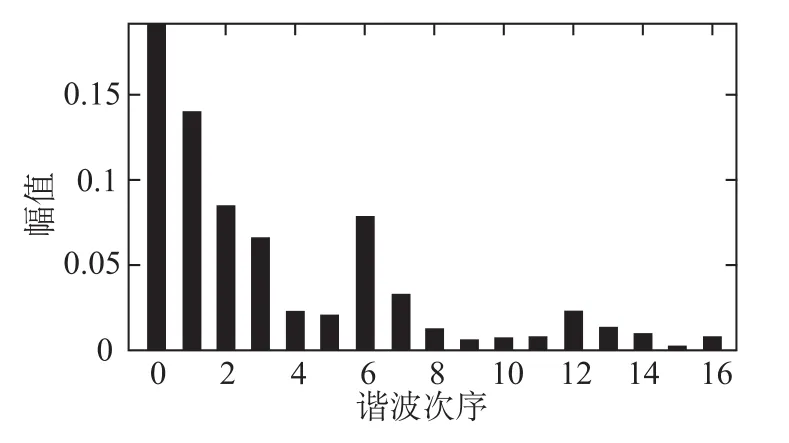
图11 励磁电流谐波幅值图

图12 故障模式5励磁电流波形图

图13 励磁电流谐波幅值图
从各模式下的谐波分析可以发现,整流二极管发生开路故障后,6次以上谐波变化不大,1次、2次、3次谐波幅值在不同故障模式下皆有不同程度升高,2次、6次谐波幅值变化最为显著。发生单个整流二极管开路故障时,1、2、3次谐波增幅最大,与无故障状态相比变化明显;当发生同相两个二极管开路故障时,1、2、3次谐波相对增加,2次谐波增幅相对明显,6次谐波减小;发生同半桥两个二极管开路故障时,1、2、3次谐波相对增加,1次谐波增幅相对明显,6次谐波减小;发生既不同相也不同半桥两个二极管开路故障时,1、2、3次谐波相对增加,6次谐波减小,1、2次谐波增幅明显,于3次谐波,因此,选取励磁电流的1次、2次、3次、6次谐波信号为故障特征信号。
3 故障辨识器的设计实现
故障辨识器的设计步骤如下:
(1)利用Matlab仿真模型获取的励磁电流的1次、2次、3次、6次谐波信号作为故障特征信号,设置故障进行仿真,选取20个训练样本,得到输入层X为4×20矩阵,用R表示,输出层Y为5×20矩阵,用P表示,1次、2次、3次、6次谐波信号用X1至X4表示,故障1至故障5的输出数据用Y1至Y5表示;
(2)对样本进行归一化处理;
(3)根据Kol mogorov定理[6],故障辨识器选用3层BP神经网络结构,则其中输入层、隐含层及输出层节点数分别为N、2N+1、M,则输入层节点数为4,隐含层节点数为9,输出节点数为5;
(4)选用正切S型函数tansig()作为隐含层传递函数,对数S型函数logsig()作为输出层传递函数,设置迭代次数为300,期望误差为0.01;
(5)在Matlab中编写神经网络训练程序,对建立的神经网络进行训练,当达到误差要求或最大迭代次数时,停止训练;
(6)对得到满足误差要求的网络,选择已准备的测试样本对网络进行验证,当测试样本输出误差满足要求时,即完成了故障辨识器的设计,若测试样本输出误差没有满足要求时,重新设计调整网络。
得到的误差收敛曲线如图14所示。

图14 误差收敛曲线
4 测试验证
选取测试样本对故障辨识器的有效性进行测试验证,表1所示为部分测试样本。运用建立好的故障辨识器对测试样本辨识,得到表2。

表1 部分测试样本

表2 测试样本网络输出量
从表2可以得到,测试样本的网络输出值与期望输出值差值在误差允许范围内,基于BP神经网络故障辨识器的故障辨识能力满足基本要求,可以实现对不易监测、故障样本少的结构单元的故障辨识作用,具有一定实际意义。
5 结束语
本文根据我军装甲车辆发电机故障诊断中存在的不足,针对不易监测、不易更换的结构单元,开展故障辨识研究。建立旋转励磁机Matlab仿真模型,对励磁电流进行谐波分析,选用1次、2次、3次、6次谐波信号为故障特征信号,并借助BP神经网络建立故障辨识器,通过测试,验证了该故障辨识器的有效性,提高了发电机状态监测诊断能力。
[1] 董今朝.装甲车辆电源系统故障机理分析与诊断方法研究[D].北京:装甲兵工程学院硕士学位论文,2013.
[2] 张 超,夏 立.基于谐波分析的旋转整流器故障检测[J].电机与控制应用,2008,35(11):51-53.
[3] 胡 青,王荣杰.基于支持向量机的电力电子电路故障诊断技术[J].中国电机工程学报,2008,28(12):107-111.
[4] 邵 兵.基于相关性模型的导弹发射装置故障诊断[J].航天发射技术,2011,2(2):228-231.
[5] 程延伟,吕 强,谢永成.装甲车辆电源系统智能故障诊断方法研究[J].计算机测量与控制,2011,19(6):1410-1413.
[6] SI MOTION SCOUT basic functions [Z].SIEMENS A&D,2007.
猜你喜欢
大电机技术(2022年3期)2022-08-06
河北电力技术(2021年2期)2021-07-29
河北电力技术(2021年2期)2021-07-29
建材发展导向(2021年7期)2021-07-16
科学家(2021年24期)2021-04-25
自动化学报(2019年12期)2020-01-19
青年歌声(2019年2期)2019-02-21
电子制作(2018年1期)2018-04-04
中国公路(2017年16期)2017-10-14
电子制作(2017年19期)2017-02-02
