
捷联双态陀螺罗经模型研究*
2015-03-15 00:50陈建国张迎辉
舰船电子工程 2015年4期
陈建国 张迎辉
(1.海军驻上海地区水声导航系统军事代表室 上海 201108)(2.上海航海仪器有限责任公司 上海 200129)
捷联双态陀螺罗经模型研究*
陈建国1张迎辉2
(1.海军驻上海地区水声导航系统军事代表室 上海 201108)(2.上海航海仪器有限责任公司 上海 200129)
捷联系统是惯性导航设备发展的必然趋势。传统双态陀螺罗经模型具有抗干扰能力强、在高纬度区可正常使用、在线测漂等优点,可借鉴到现代捷联罗经设计中。论文介绍了捷联罗经应用传统双态陀螺罗经模型的思路和方法,并给出了模型框图和程序流程图。
双态罗经; 捷联系统; 方位仪状态
Class Number U666.12
1 引言
电控陀螺罗经是常用的舰船导航设备,它为载体提供航向信息,保障航行安全。现代固态陀螺的出现和计算机技术的快速发展,为开发捷联罗经提供了可能。捷联罗经将惯性敏感元件(陀螺和加速度计)直接“捆绑”在载体上,由高速计算机代替框架结构,完成指北功能。与传统罗经系统相比,它有如下优点[1]:
1) 采用软件实现指北,采用数字滤波方法克服载体摇摆误差,实现灵活,更新方便;
2) 捷联系统无框架结构,体积小,重量轻;
3) 减少了各种加工误差风险,敏感元件便于安装、维修和更换;
4) 捷联系统在传统罗经提供航向的基础上,还提供水平信息和姿态角速度信息,内容更丰富;
5) 捷联系统敏感元件易于重复布置,实现冗余技术,这对提高性能和可靠性十分有利。
虽然传统罗经与捷联罗经在硬件结构上有较大差别,但其基本原理却是相似的。即通过敏感元件测量当地地球旋转角速率和重力加速度信息,找到当地北向信息,这个过程即惯性导航系统中的对准[2]。双态陀螺罗经含罗经状态和方位仪状态,在低纬度下,工作在罗经状态;高纬度或测漂需要时,可工作在方位仪状态。将传统罗经双态模型借鉴到捷联罗经设计中,可提高系统抗干扰能力,扩大导航区域,增加在线测漂能力等;传统理论与现代科技结合,具有十分重要意义。
2 传统双态罗经模型
传统电控陀螺罗经采用框架结构,利用电磁摆(或加速度计)和陀螺仪敏感重力和地球自转角速度信息,经计算输出电磁力矩,控制陀螺仪跟踪当地北向,框架结构起到隔离载体运动的作用。双态陀螺罗经含罗经状态和方位仪状态,在低纬度下,摆信号输出经控制系统放大,输给水平力矩器(水平修正回路)及方位力矩器(方位修正回路),形成闭环,驱动陀螺主轴指北,保证罗经精度,这就是所谓罗经状态[3]。在高纬度下(一般大于±70°),由于地球自转的水平分量减弱,找北能力急剧下降,罗经模型误差大,这时一般拉断方位修正回路(纬度补偿依然存在),形成开环,这就是所谓方位仪工作状态,其原理图见图1,虚线部分在方位仪状态断开。
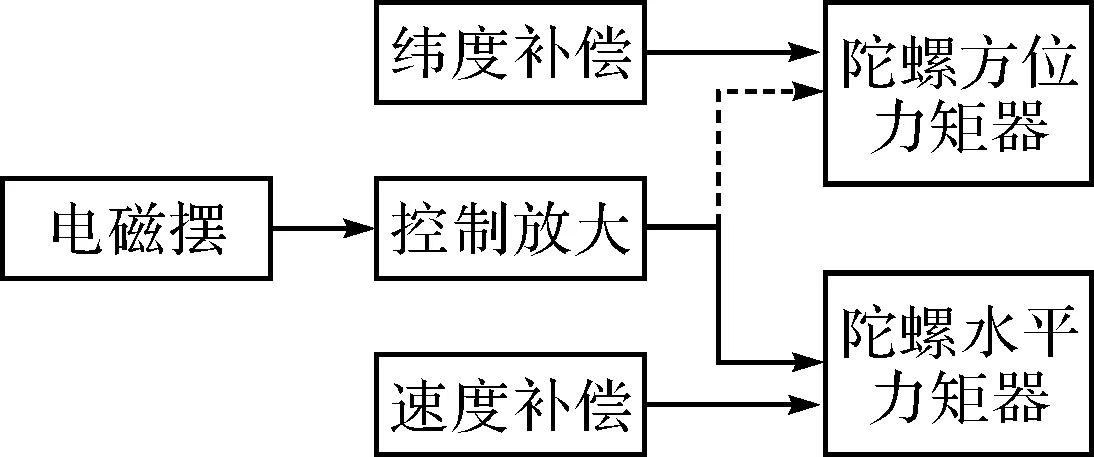
图1 电控陀螺罗经状态原理图
具体实现中,传统罗经在启动后经历修平和快稳两个阶段,称之为初始罗经对准,然后才进入罗经导航状态。“修平”阶段,电磁摆(或加速度计)输出的电压信号经放大、相敏整流后的全部电流都输送给陀螺水平力矩器,使主轴快速修正至一定水平精度。“快稳”阶段,由电磁摆输出的电压信号经放大、相敏整流后,几乎全部流入方位力矩器,以产生最大的找北力矩,使陀螺球主轴以最快的速度靠近子午面;整流后的很小部分电流流入水平力矩器,产生快稳阻尼。这两个阶段的信号来源都是电磁摆信号,但由于参数设计不同,分配给陀螺水平力矩器和方位力矩器的力矩大小差异较大;罗经状态是两者参数的折中,方位仪状态与修平状态模型基本相同。
双态罗经的方位仪工作状态在高纬度下可减小罗经原理本身带来的大误差,为用户提供了另一种选择,在有其它高精度导航设备的参照下,还可估计出陀螺仪的漂移,并实时补偿,因此,在面世之初,受到极大好评。但由于方位修正是开环的,其航向误差与惯性导航系统一样,随时间积累,其误差积累速度取决于陀螺仪本身的漂移误差[4]。随着现代材料、工艺的发展和新型陀螺仪表的出现,陀螺精度较以前有了大幅度的提升,双态罗经的开发与研究仍然具有现实意义。
3 捷联罗经模型及参数
捷联罗经实现方案较多,比较典型的有传统罗经法、卡尔曼滤波法等。卡尔曼滤波法找北速度快,但对外界测量信息的准确性依赖较强,抗干扰能力较差[5];罗经法具有理论成熟、对外界信息依赖小、动态误差稳定的特点,仍然在现代捷联罗经设计中有一席之地,但由于罗经原理限制,振荡周期较长(无阻尼振荡周期达84.4min),找北速度较慢[6]。将两者有机结合将是一个不错选择。
论文先介绍捷联系统的罗经指北方案,该方案是通过构造数学平台代替传统罗经系统的真实平台,因此可以将框架系统的罗经对准方法移植到捷联系统中,也就是说将传统罗经对准中用于控制平台运动的信号流,使用数学方法实现。数学平台构造原理如图2所示[7]。
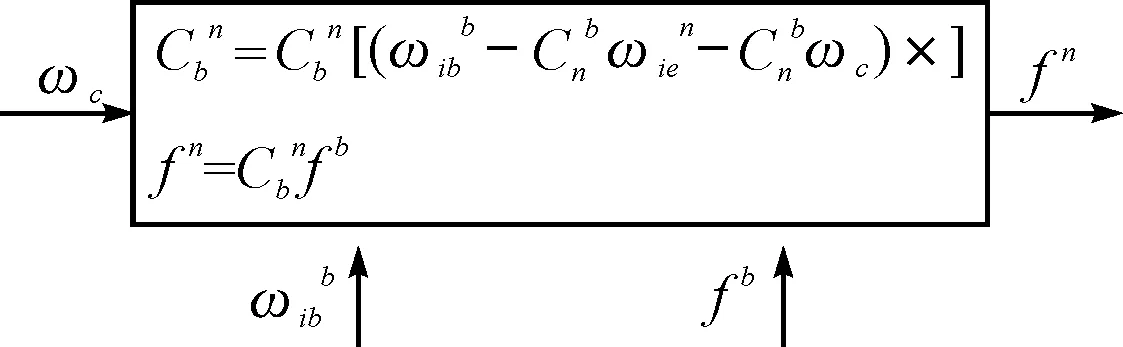
图2 捷联罗经数学平台

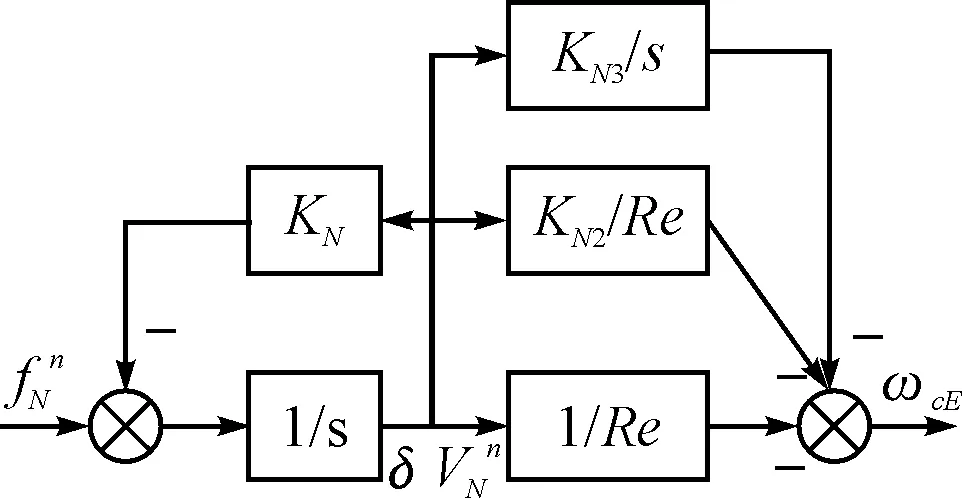
图3 捷联罗经对准北向水平通道
对反馈网络离散化,即可得到罗经状态北向通道的计算模型:
Δt为系统解算周期。
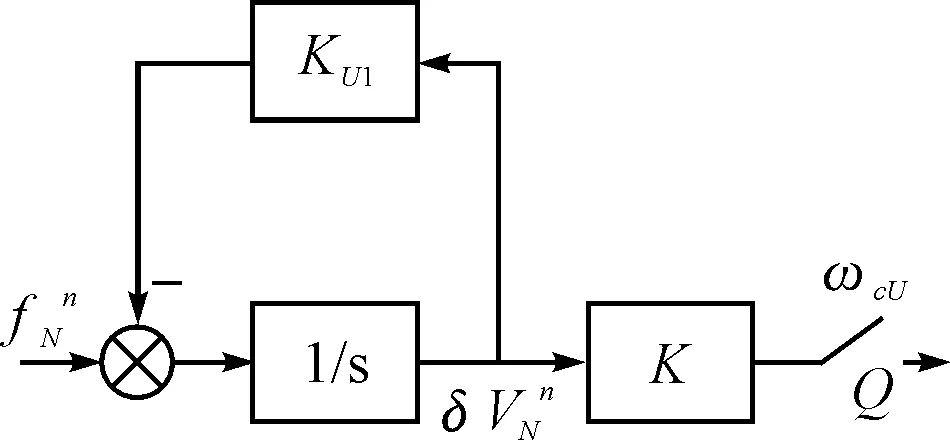
图4 捷联罗经对准方位通道
同样,得到方位通道的计算模型:
KN1、KN2、KN3、KU1、K(s)等参数的选取,应根据实际使用环节,结合准确性和快速性要求,经仿真后,适当选取[8]。参照传统罗经,初始对准分为修平阶段和快稳阶段;在修平阶段,KN2、KN3较大,KN1较小,开关Q(如图4)断开,即仅提供修平力矩;在快稳阶段,开关Q闭合,KU1较小,K(s)增益较大,以保证将主轴较快“拉”到子午面。与Kalman滤波对准相比,罗经对准不依赖外部信息,但速度较慢;在有外接准确信息(如速度、位置等),一般采用Kalman滤波对准,对准速度较快。进入导航状态后,捷联罗经的两种工作状态,罗经状态和方位仪状态,当开关Q接通时,反馈信息接入捷联平台,设备工作于罗经状态;Q断开时,捷联平台处于开环状态(纬度补偿依然存在),设备处于方位仪状态。这时,捷联解算平台方位驱动角速度为ωcU=ωiesinφ,即地理坐标系当地地球自转角速度的垂直分量,由于陀螺漂移及外界干扰引起的罗经误差将无法补偿,航向误差随时间积累,这也是方位仪状态无法长期工作的主要原因。方位仪状态在载体静态或匀速直航状态下,利用外界较高精度的航向信息,可估计出陀螺的航向漂移量,利用这一信息,可对捷联平台的陀螺漂移量进行定期补偿,这是方位仪状态的另一大优势[9]。
4 捷联罗经软件流程
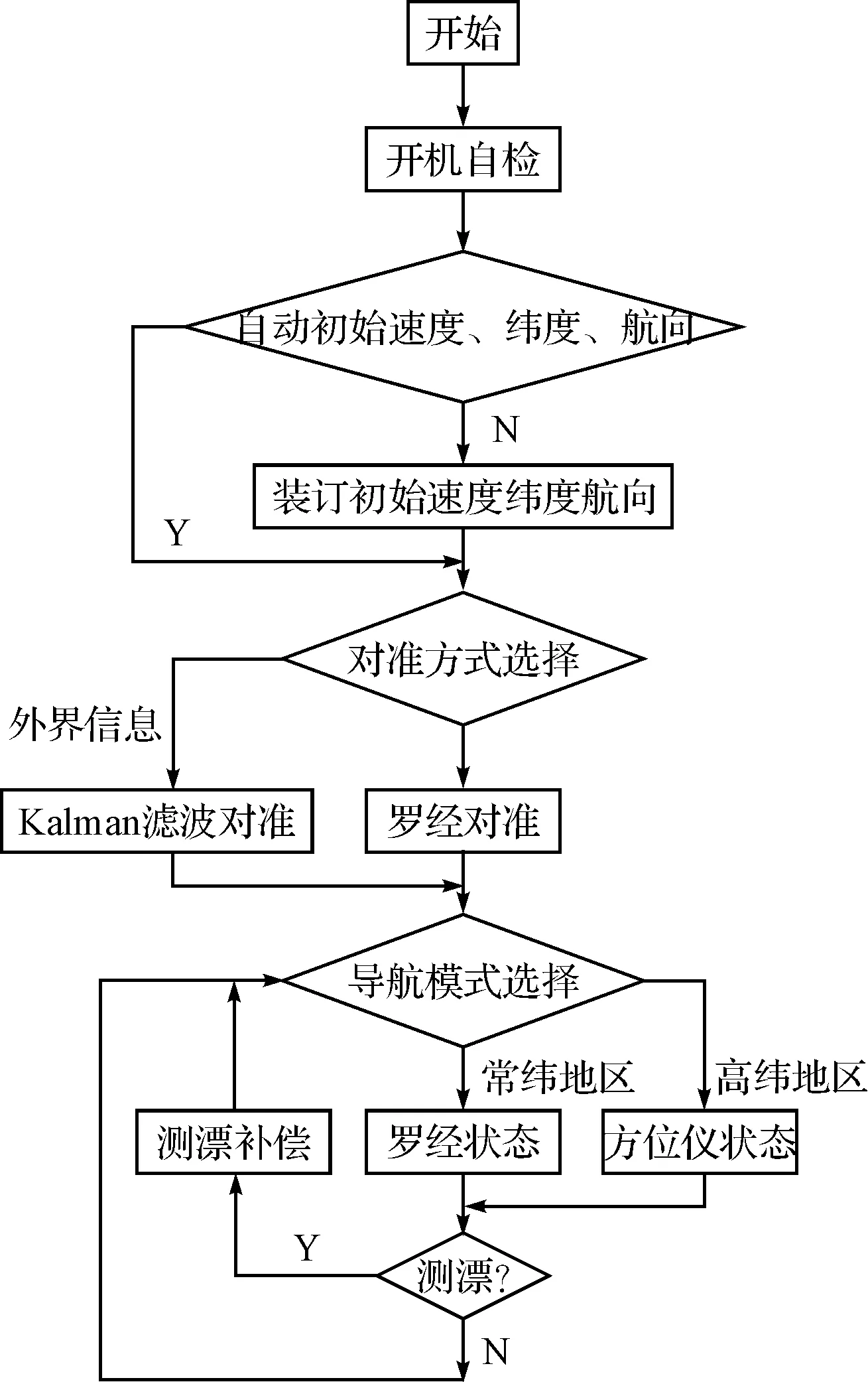
图5 捷联双态罗经程序流程图
有了借鉴传统双态罗经的基本思路,在确定参数并对模型进行离散化后,就可考虑软件的设计了。某捷联双态罗经的程序流程图如图5所示。该流程中,初始对准方式可选择,在系统可获得准确速度或位置信息,并且载体静态或匀速直航状态时,采用Kalman滤波对准方式,否则采用罗经对准方式;导航模式根据纬度不同,设置为罗经状态或方位仪状态,在预知舰船机动航行时间较长的情况下,也可进入方位仪状态,待机动航行结束后,重新进入罗经导航方式;在设备使用一段时间(一般以月计)后,陀螺仪漂移可能发生一些变化,在设备软件流程中设置了测漂选择(模型与方位仪状态相同),在载体静态或匀速直航状态(横摇和纵摇角较小),可进入测漂功能,利用一段时间(可取1小时),测出漂移值,系统自动进行航向补偿;在某捷联罗经中将该方案实施,通过了静态试验、摇摆试验及跑车试验证明,传统双态罗经模型借鉴到捷联罗经是可行、有效的。
5 结语
随着固态陀螺技术和捷联系统技术的不断发展和成熟,由于有结构简单、性能可靠、输出信息丰富的优点,捷联罗经成为未来舰船自主导航设备的发展趋势[10]。它利用现代卡尔曼滤波技术,实现快速稳定;利用数字滤波手段,灵活克服摇摆干扰。借鉴传统双态罗经模型,对外部信息依赖小,抗干扰能力强;可克服高纬度区域航行罗经误差大的原理性弊端,可在线估算陀螺漂移误差。因此,将传统双态罗经模型借鉴到捷联罗经设计中,取长补短,可取得不错的效果。
[1] 陈建国,等.船用捷联惯性导航系统研究[J].船舶,2009(4):30-33.
[2] 陈建国.舰艇自主导航设备特点比较及发展前景[J].船舶,2011(1):44-47.
[3] 陈建国,孙钟阜.电控罗经的变传递系数阻尼方法[J].海军航空工程学院学报,2010(4):388-390.
[4] 许江宁.陀螺原理[M].北京:国防工业出版社,2005:135-139.
[5] 周亢,闫建国.卡尔曼滤波在捷联惯导系统初始对准中的应用[J].计算机仿真,2008(9):46-49.
[6] 黄德鸣,等.平台罗经[M].北京:国防工业出版社,1994:67-75.
[7] 翁浚,等.基于大失准角时变参数罗经初始对准算法[J].中国惯性技术学报,2012(8):425-429.
[8] 陆恺,吴健中.电控罗经参数设计的探讨[J].上海交通大学学报,1980(3):9-12.
[9] 黄德鸣,程禄.惯性导航系统[M].北京:国防工业出版社,1986:166-172.
[10] 王巍.惯性技术研究现状及发展趋势[J].自动化学报,2013(6):723-728.
Study of Strapdown Double-state Gyrocompass Model
CHEN Jianguo1ZHANG Yinghui2
(1. Military Representatives Office of Underwater Sound & Navigation System in Shanghai Area, Shanghai 201108) (2. Shanghai Marine Instrument Co., Ltd., Shanghai 200129)
Strapdown system is the development trend of inertial navigation equipment. The traditional two-state gyrocompass model has strong anti-interference ability, can be used in high latitude area and can measure drift online. The model can be used in modern strapdown gyrocompass. This paper introduces the ideas and methods of the application of traditional two-state gyrocompass model in strapdown gyrocompass, and gives the block diagram of the model and the software flow chart.
two-state gyrocompass, strapdown system, directional gyro mode
2014年10月5日,
2014年11月27日
陈建国,男,硕士,工程师,研究方向:舰船导航。张迎辉,男,工程师,研究方向:舰船导航及装备维修。
U666.12
10.3969/j.issn1672-9730.2015.04.014
猜你喜欢
幼儿园(2021年12期)2021-11-06
宇航学报(2019年8期)2019-09-06
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年2期)2016-02-06
火控雷达技术(2016年1期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
