
一种小型航行自控系统伺服执行机构设计*
2015-03-15 00:50胥文清
舰船电子工程 2015年4期
胥文清
(中国舰船研究设计中心 武汉 430064)
一种小型航行自控系统伺服执行机构设计*
胥文清
(中国舰船研究设计中心 武汉 430064)
航行自动控制系统是降低船舶在风浪中运动响应的重要装置,而开展水池缩比船模试验是研究航行姿态控制系统有效性的重要手段。论文提出了一种适用于水池缩比船模试验的航行自动控制系统伺服执行机构设计方案,经实际水池船模试验验证,该系统能够有效满足航行自动控制系统要求,为船舶航行自动控制系统研制及试验提供参考。
航行自动控制; 执行机构; T型水翼; 压浪板
Class Number TP273
1 引言
在运用自动控制技术来降低船舶在航行过程中的运动响应,改善船舶的耐波性方面,国外开展了大量的研究工作,早在1972年Carley利用操舵会引起横摇的特性,将自动舵和减摇鳍联合起来进行船舶运动的综合控制[1],穿浪双体船具有良好的耐波性、稳性和快速性[2~3],对于穿浪双体船或小水线面船[4]的运动控制技术,国外目前主要采用首部配置T型水翼,以及在船艉部配置压的方式来实现[5~7],如日本建造的100m穿浪双体船,澳大利亚INcat公司为西班牙建造的98m穿浪双体船,AUSTUL为美国建造的独立级濒海战斗舰等,而国内对于采用T型水翼和压浪板作为执行机构来控制穿浪双体船、三体船在波浪中的运动响应方面尚没有成功应用,处于研究阶段。如何验证控制系统的有效性是研究船舶航行自动控制系统的难点之一,仿真分析具有局限性,建造实船试验造价高昂,采用水池船模[3]试验验证航行自控系统是验证控制系统及算法有效性的重要手段,但是船模载荷能力小,摇摆周期短,对航行自动控制系统伺服执行结构要求高。针对这一问题,本文提出的一种适用于水池船模试验的航行自动控制系统伺服执行机构,重量轻,响应速度快,经实际双体船水池船模试验验证,该机构能够有效满足船模自动控制系统要求。
2 执行机构总体方案
伺服控制系统[8~9]由三套执行机构组成,包括二套安装在艉部两舷的压浪板和一个安装在艏部中央位置的T型水翼。每套执行机构均采用直流无刷伺服马达、直流无刷伺服驱动器、四头高速滚珠丝杆、直线导轨、谐波减速器等实现机械控制和传动,采用增量编码器作为伺服控制器的速度反馈,T型水翼及压浪板角度检测元件。通过检测伺服机构运行距离,推算水翼和压浪板角度。
T型水翼位于船体中间靠艏位置,压浪板位于船艉左右两侧,具体如图1所示。实船98m,船体模型按1∶25设计制作。
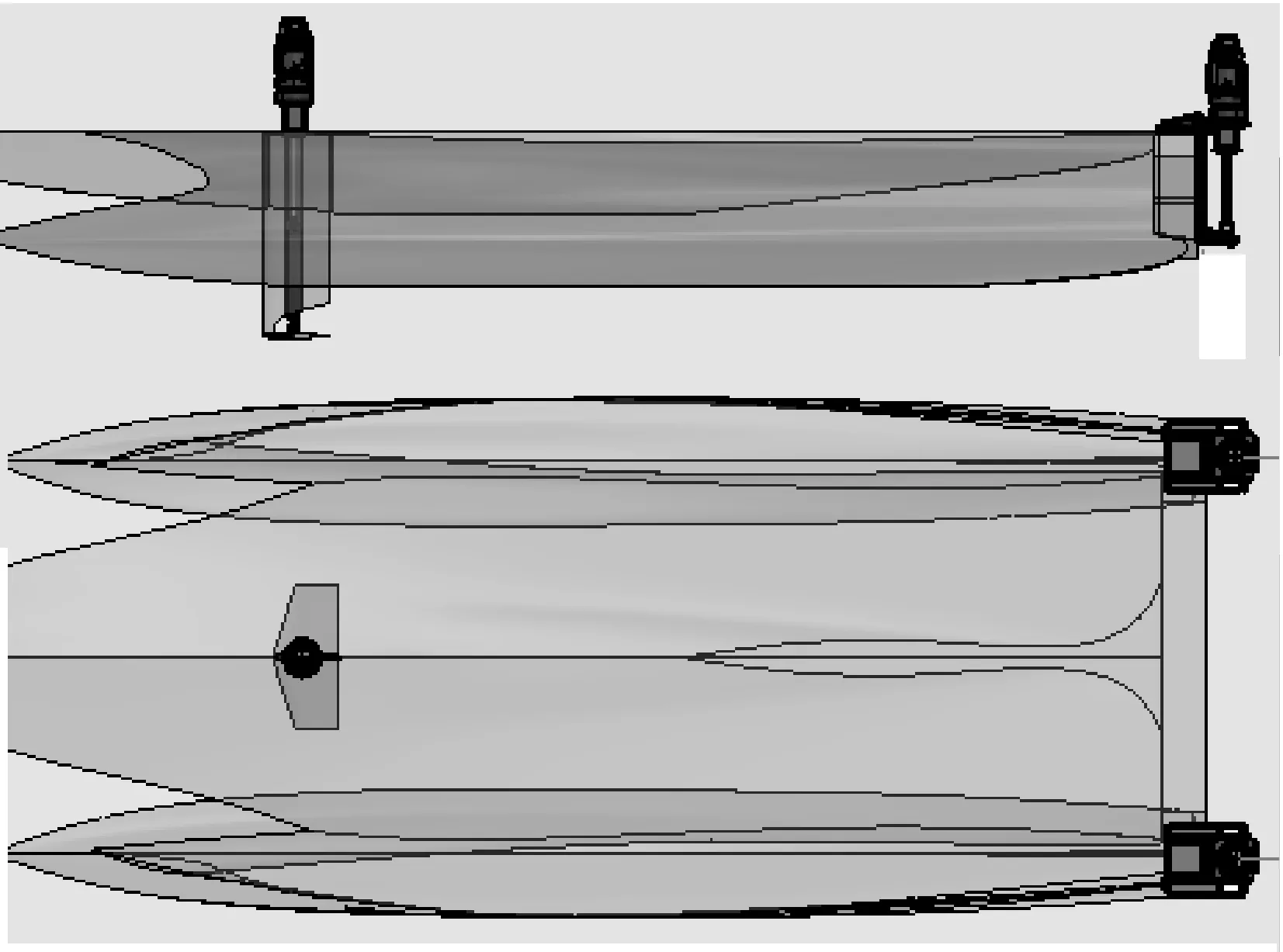
图1 执行机构布置安装示意图
3 执行机构传动设计
3.1 T型水翼传动设计
T型水翼传动结构如图2所示,其中T型水翼包括固定翼和活动翼,活动尾翼和固定尾翼通过铰链连接,T型水翼采用直流无框架电机+滚珠丝杆+传动杆直接驱动水翼转动的方案,全部机构对称布置,T型水翼的设计最大角度运动范围为-20°~+20°。

图2 T型水翼传动结构
直线传动装置伸出一个直线推杆,直线推杆和传动杆通过铰链连接。传动杆和活动尾翼亦通过铰链销轴和铰链支座连接,电机工作时,带动传动直线机构上下运动,实现活动尾翼与固定尾翼产生不同的夹角,从而产生不同的水作用力,实现对船模运动姿态的控制。T型水翼活动翼面的运动情况如图3所示。

图3 T型水翼运动示意图
3.2 压浪板传动设计方案
船艉压浪板的传动设计方案中,直线传动机构、驱动马达、驱动器等和T型水翼的直线传动机构完全相同,以减少零件和备件的种类。铰链销轴及铰链支座按照压浪板的尺寸设计,尽量减小体积和迎水横截面积,以减少对水流的影响。与T型水翼不同的是,T型水翼旋转轴是固定尾翼和活动尾翼的连接处,而压浪板的活动轴是压浪板与船尾的连接部位。船艉压浪板的设计最大角度运动范围为-20°~+20°,T型水翼活动翼面的运动情况如图4所示。

图4 压浪板运动示意图
T型水翼和压浪板伺服执行机构实物照片如图5所示。

图5 T型水翼(左)和压浪板(右)
4 电机功率计算及负载测试
设计艏部T型水翼和艉压浪板的行程为±20°,船模纵摇周期最小为0.5s。假定船模在水池拖曳航行时T型水翼和艉压浪板随船体的纵摇做正弦运动。角速度方程为
最大线速度计算:
1) T型水翼
活动翼长度为l1,牵引点为端部,故旋转轴半径长度为R=l1。
最大线速度:
2) 艉压浪板
活动翼长度为l2,牵引点为艉压浪板中部,旋转半径最大长度为R=l2/2。
· 最大线速度:
· 最大推力计算:
T型水翼和压浪板推力Fi计算如下
式中,Ai为水翼或压浪板面积,Ci为升力系数曲线的斜率,α为T型水翼和压浪板攻角,ρ为水密度,U为航速。
· 最大功率计算:
最大功率计算时,最大考虑适当余量,以最大推力和最大线速度之积为最大功率,即:
Pmax=Fmax×Vmax
经计算T型水翼最大功率为15.48W,压浪板最大功率为25.8W。为统一选型去25.8W为最大功率,传动机构效率按照60%考虑,所需电机功率为43W,现选择60W无刷电机,直流电机按照2倍过载能力考虑,设计最大输出功率为120W。
为了验证执行机构的响应速度能够满足使用需求,对执行机构加载20kg负载,上位机系统输出正弦控制命令,测试条件频率范围从1Hz~4Hz,角度范围为±2°~±10°,对响应延迟时间进行了测试,测试结果如表1所示。

表1 响应延迟时间测试结果表
5 伺服控制系统
执行机构伺服系统采用PID控制[10~11],由伺服机构集中控制器、伺服驱动器、伺服电机、滚珠丝杠、T型水翼和压浪板组成。伺服驱动器、伺服电机和滚珠丝杠一共三套,三套伺服装置采用CAN总线组网,使用CANopen现场总线,通讯速率500Kbps,保证了水翼的快速响应。伺服机构集中控制器与上位DSP采用串口通讯,DSP发送来的水翼与压浪板角度值,经过计算与转换后,将运动指令通过CAN总线发送给三个伺服驱动器,驱动电机经传动机构使水翼和压浪板运动到指定的角度。同时伺服机构集中控制器会采集水翼和压浪板当前的角度值,并通过串口发送给上位DSP。
CANopen是一种架构在控制局域网路(Control Area Network,CAN)上的高层通讯协定,包括通讯子协定及设备子协定常在嵌入式系统中使用,也是工业控制常用到的一种现场总线。
CANopen实现了OSI模型中的网络层以上(包括网络层)的协定。CANopen标准包括寻址方案、数个小的通讯子协定及由设备子协定所定义的应用层。CANopen支援网络管理、设备监控及节点间的通讯,其中包括一个简易的传输层,可处理资料的分段传送及其组合。
1) 伺服机构集中控制器
由于三套伺服是以CANopen总线组网,一个主站CANopen设备作为集中控制器。采用带有CAN接口的单片机板,使用主流芯片SJA1000作为CAN控制器,82C250作为CAN驱动器,支持CAN2.0A和CAN2.0B(PeliCAN)协议。此单片机板上还具有RS485总线接口,自带USB-UART,方便调试与通讯。
2) 伺服驱动器

图6 上位机DSP与伺服系统程序流程
配有三通道线驱增量式光电编码器,选用Elmo的HAR-A5/50CG直流电机驱动器。此驱动器具有小体积,高功率密度,高刚性,高可靠性,智能化,并且同时支持有刷和无刷电机。Elmo伺服驱动器拥有PTP,PVT,PT,ECAM等多种运动控制功能,可在内部编写负载的运动控制程序。驱动器标配CANopen接口,支持DS301、P402协议,控制简单,功能强大。驱动器自带的IO口还可以直接通过软件配制成限位开关与原点开关,实现自动回零。上位机DSP与伺服系统程序流程如图6所示。
伺服机构每20ms给DSP2812控制器发送一次角度数据作为反馈。DSP2812控制器每20ms给伺服机构发送一次数据作为命令。
上位机DSP对伺服机构命令程序:
void Load_SA()
{
signed int TempA,i;//起始符
SentCharA[0]=0x55;
SentCharA[1]=0xAA;
//T型水翼角度
TempA = Ang_CT*1000;
SentCharA[2] = TempA >>8;
SentCharA[3] = TempA & 0x00FF;
//压浪板
TempA = Ang_CL*1000;
SentCharA[4] = TempA >>8;
SentCharA[5] = TempA & 0x00FF;
//右压浪板
TempA = Ang_CR*1000;
SentCharA[6] = TempA >>8;
SentCharA[7] = TempA & 0x00FF;
//异或校验
TempA=0;
for (i=2 ; i<10 ; i++)
{
TempA=SentCharA[i]^TempA;
}
SentCharA[10] = TempA & 0x00FF;
//结束符
SentCharA[11]=0xAA;
SentCharA[12]=0x55;
//}
6 结语
本文提出的一种适用于水池船模试验的航行姿态自动控制系统伺服执行机构,重量轻,响应速度快,有效解决了采用船模验证航行姿态稳定系统有效性时,船模载荷能力小,摇摆周期短,对航行姿态稳定系统伺服执行结构响应时间要求高的问题,经实际双体船水池船模试验验证,该系统能够较好的满足船模自动控制系统要求,为船舶航行自动控制系统试验研究及其它伺服执行机构设计提供参考。
[1] 金鸿章,王科俊.智能技术在船舶减摇鳍系统中的应用[M].北京:国防工业出版社,2003.
[2] 董文才,夏翔,左文锵,等.高速轻型穿浪双体船型及性能试验研究[J].中国造船,2008,49(3):118-26
[3] 张晓阳,李铁骊,林焰.穿浪双体船阻力性能预报与模型试验分析[J].大连理工大学学报,2009,49(3):396-400.
[4] 黄鼎良.小水线面双体船性能原理[M].北京:国防工业出版杜,1993.
[5] CRUZ D L, LUCAS J M D, ARANDA P, et al. A research on motion smoothing of fast ferries[C]//IFAC Conference — Control Aplications in Marine Systems 2001(CAMS 2001). Italy,2001.
[4] GIRON J M, ESTEBAN S. Frequency domain study of longitudinal motion attenuation of a fast ferry using a Tfoil[C]//Proceedings of the 17th World Congress of the International Federation of Automatic Control. Koera,2008.
[7] 金亨哲.双体小水线面水翼复合型高速船(HYSWATH)概念设计与性能研究[D].上海:上海交通大学,2005.
[8] 杨盐生.舰船运动控制研究[J].交通运输工程学报,2003(3):34-39
[9] 梅生伟,等.现代控制理论与应用[M].北京:清华大学出版,2003.
[10] 李岳林,王立标,曾志伟.汽油机怠速稳定性的复合模糊-PID控制方法研究[J].内燃机工程,2010,31(3):57-60.
[11] 陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,2000.
Design of A Small Servo Actuator of Ship Ride Automatic Control System
XU Wenqing
(China Ship Research and Development Center, Wuhan 430064)
Ship ride automatic control system is an important device for reducing the ship motion in waves, carrying out towing ship model test is an important means to study the validity of ship ride automatic control system. The paper designs a small servo actuator of ship ride automatic control system for towing ship model test. The actual towing ship model tests validate that the servo actuator satisfy the requirement of the system, provide a reference for study or test of ship ride automatic control system.
ship ride automatic control, servo actuator, T-foil, trim tab
2014年10月21日,
2014年11月30日
胥文清,男,硕士,工程师,研究方向,舰船电子信息,自动控制。
TP273
10.3969/j.issn1672-9730.2015.04.015
猜你喜欢
天然气与石油(2022年4期)2022-09-21
北华大学学报(自然科学版)(2021年3期)2021-07-13
电脑爱好者(2020年6期)2020-05-26
农业技术与装备(2020年1期)2020-03-04
北京航空航天大学学报(2017年5期)2017-11-23
舰船科学技术(2016年1期)2016-02-27
中国高新技术企业(2015年17期)2015-05-18
安徽电气工程职业技术学院学报(2015年3期)2015-05-04
小学生时代·大嘴英语(2014年6期)2014-11-04
航海(2014年4期)2014-08-28
