
基于模糊自适应PID控制的反应釜系统的设计与仿真
2015-03-15 06:31:59罗小燕于孟陈斌蒙鹏宇
有色金属科学与工程 2015年5期
罗小燕, 于孟, 陈斌, 蒙鹏宇
(江西理工大学,a.机电工程学院;b.材料科学与工程学院,江西 赣州341000)
基于模糊自适应PID控制的反应釜系统的设计与仿真
罗小燕a, 于孟a, 陈斌a, 蒙鹏宇b
(江西理工大学,a.机电工程学院;b.材料科学与工程学院,江西 赣州341000)
针对我国现有低品位白钨矿分解设备普遍存在能耗高、产品质量不稳定,以及控制系统简单等问题,根据白钨碱压煮的工艺要求,建立了反应釜温度控制数学模型;以釜内温度为主被控量、夹套温度为辅助被控量,构建了串级控制系统;采用模糊自适应方法选择最优PID参数,开发了基于单片机的温度智能控制系统,实现了白钨碱压煮工艺过程的自动化.通过仿真表明,模糊自适应PID控制系统具有误差小、响应速度快的特性;采用串级控制方法的温度控制系统可以克服反应釜系统的纯滞后现象,实现了反应釜内温度的精确控制,保证了钨碱压煮工艺产品质量的稳定.
白钨矿;反应釜;模糊自适应PID;串级控制;单片机;仿真
随着我国黑钨矿资源的不断消耗,开发利用白钨矿已成为必然趋势,但传统的碱分解设备存在着能耗高、产品质量不稳定等问题[1-2].拟在反应釜中采用二次碱压煮工艺技术,使三氧化钨的浸出率得到提高[3-5].但因反应釜在工作过程中具有非线性、大时滞等特点,且影响氧化钨浸出率的工艺因素多,以经典 PID控制很难达到理想的控制效果[6-7].因此,需通过设计模糊自适应控制器,建立反应釜温度串级控制系统,以提高系统的抗干扰能力和稳定性.
1 白钨碱压煮反应釜系统的数学模型
本文中白钨矿分解采取具有回收环节的二次碱压煮工艺,在即将达到白钨碱压煮工艺所设定的反应温度时,在反应釜夹套中通以一定的冷却介质来移走反应放出的多余热量,要求反应釜内物料温度恒定在160℃,并保温60 min,以提高三氧化钨的浸出率.根据化学反应中的热量平衡关系[8],式(1)为反应釜内温度与热量平衡方程,即

式(2)套内温度与热量平衡方程,即

根据式(1)、式(2)可得到反应釜温度的基本动态方程,再经过线性化处理并进行相应的拉式变换,可推导出各通道中冷剂流量对反应釜温度的传递函数[9].式(3)为反应釜温度控制系统的总传递函数,即

式(4)为夹套内冷剂流量对夹套温度的传递函数,即

式(5)为釜内冷剂流量对反应釜温度的传递函数,即

2 模糊自适应PID控制器的设计
2.1 确定输入、输出变量和量化因子
根据所选工艺,反应釜内的最佳温度为160℃,变化区间为[155,165].设温度偏差e的基本论域为[-5,5]℃,偏差的变化率ec的基本论域为[-1,1].依据模糊PID控制器的控制规律同时兼顾控制精度,将输入的e和ec和输出的△Kp、△Ki、△Kd分为7个模糊集,为{NB,NM,NS,ZO,PS,PM,PB},均选用三角形和高斯型[10-13].
应用模糊合成推理PID参数的整定算法,第K个采样时间的整定为

式 (6)中 Kp0,Ki0,Kd0为 PID控制器的初始参数,△Kp、△Ki、△Kd为 PID参数的变化量,Kp、Ki、Kd为最终送至PID控制器的参数,k为叠加次数.
经过整定得出Kp0=110,Ki0=1 500,Kd0=3.
Gorillas live in groups(群组).Their leader(领导者)is often a male(雄性的)gorilla.They are always big and strong.They beat(拍打)their chests(胸)to make loud noises.They also shout and show their teeth to make gorillas from other groups scared(害怕的).
由于基本论域中的实际测量值X在[Xmin,Xmax]之间,与模糊集合论域[-6,6]范围不一致,为了便于系统输入,输出参数需要映射到论域内,即经过变换公式转化为[-6,6]中的语言变化量 Y.其中,Xmax=(-Xmin)=x,Ymax=(-Ymin)=6,则实际测量值X与语言变化量Y之间的关系为[9]根据误差因子确定模糊化因子为:使其作为模糊子系统仿真模型的输入参数的增益值;解模糊因子得到:K1=0.5,K2=0.01,K3=0.01,使其分别作为模糊子系统仿真模型的3个输出参数的增益值,即模糊化因子将基本论域转化为模糊集合论域[-6,6].

2.2 控制规则与模糊控制表
系统偏差e和系统偏差的变化率ec经过模糊化后分别为模糊变量E和EC.经模糊推理后的输出量为PID参数Kp、Ki、Kd的模糊输入量,再经过解模糊后对应的精确量则为PID控制器的参数变化量△Kp、△Ki、△Kd.此PID参数即为适应于当前环境的具有动态变化的参数,通过运算可控制冷剂阀门的开度,从而精确控制反应釜温度[7].根据上述特性可归纳出对于不同e和ec的参数Kp、Ki、Kd的自整定原则,经过MATLAB的M语言调试,得到其 Kp、Ki、Kd实时输出曲线如图1所示,△Kp的模糊规则如表1所示,△Ki、△Kd的模糊规则可相对应△Kp而建立.
2.3 模糊推理
选用Mamdani型模糊推理办法,经过规则匹配和触发、规则前提推理,最后利用重心平均法进行解模糊操作[10],得出参数变化量△Kp、△Ki、△Kd,根据式 (6)将以上参数变化量与初始参数△Kp0、△Ki0、△Kd0整合,送至经典PID控制器,就可以在当前暂态获得理想的控制效果.其模糊推理规则及模糊系统稳定性曲面如图2和图3所示.
通过图2可知:偏差e和偏差的变化率ec的收敛响应变化较快,且趋于零值,模糊输出量对应误差输入量分布合理,说明模糊推理规则较为科学;通过图3可知,模糊曲面的梯度分布较为明显,且图形坡度平缓,说明所设计的模糊系统从误差和误差变化到3个PID参数变化量的模糊映射与理论设计匹配良好.
2.4 在SIMULINK中建立模糊子系统
建立如下模糊模型和PID模型,并分别将其封装成子系统如图4所示.
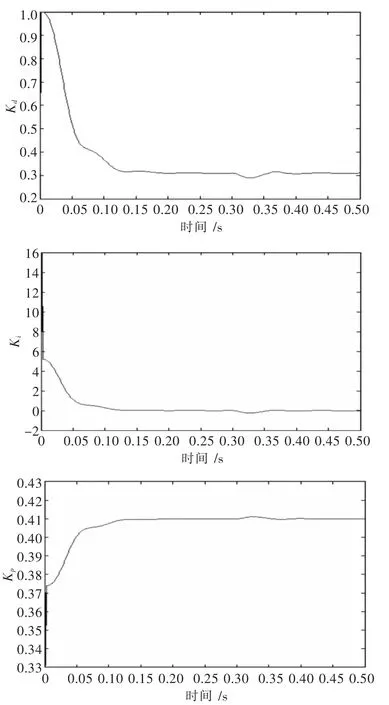
图1 Kp、Ki、Kd的自适应调整Fig.1 Adaptive adjustment of Kp、Ki、Kd
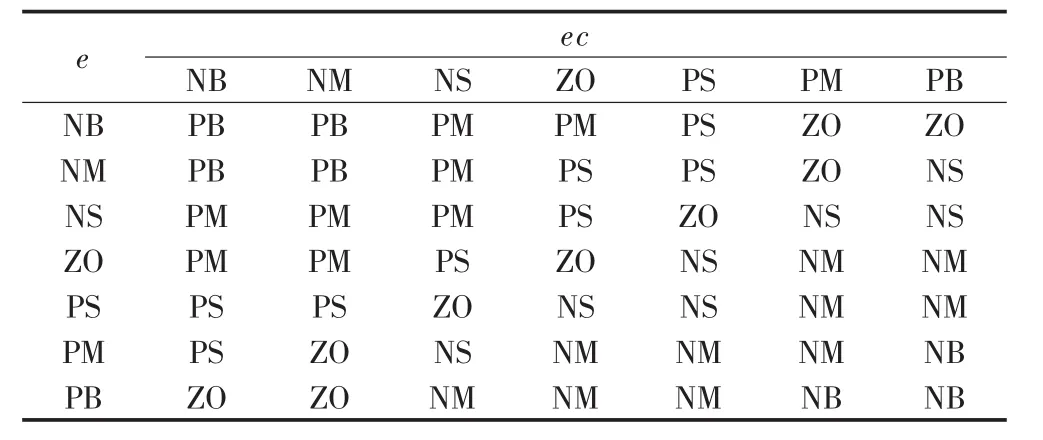
表1 ΔKp模糊规则表Table 1 Fuzzy rule table of ΔKp

图2 模糊推理规则图Fig.2 Diagram of fuzzy inference rules
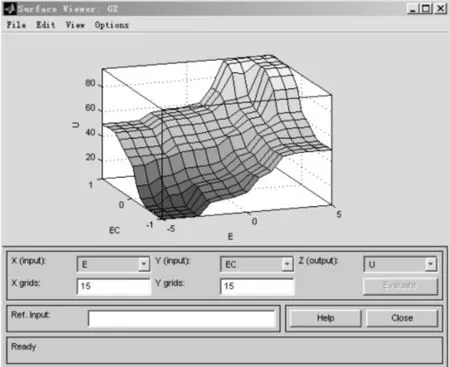
图3 模糊系统稳定性曲面Fig.3 Fuzzy system surface
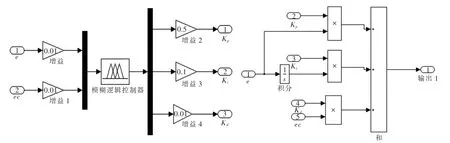
图4 模糊模型和PID模型子系统Fig.4 Fuzzy model and PID model subsystem
2.5 利用子系统对控制系统进行SIMULINK建模
在已调试参数△Kp0=110,△Ki0=1 500,△Kd0=3的基础上,将模糊控制器的输出控制信号△Kp、△Ki、△Kd与已调试参数相加求和一起送到经典PID控制器进行在线参数整定.依照以上要求,在模糊逻辑控制器前后分别代入模糊化因子和解模糊因子,建立基于参数修改的模糊自适应PID模型并封装成子系统如图5所示.
模糊PID控制系统的响应曲线如图6所示:曲线1表示经典PID控制器的系统输出;曲线2表示模糊PID控制器的系统输出.分析图6可知,模糊自适应PID控制器较经典PID控制器能够更为迅速、平稳的进入稳态,且稳态精度高.而且模糊自适应PID控制器的超调量仅为0.2%,大约是经典PID控制器的1/100.因此,模糊自适应PID控制器具有良好的动态特性和稳态特性.
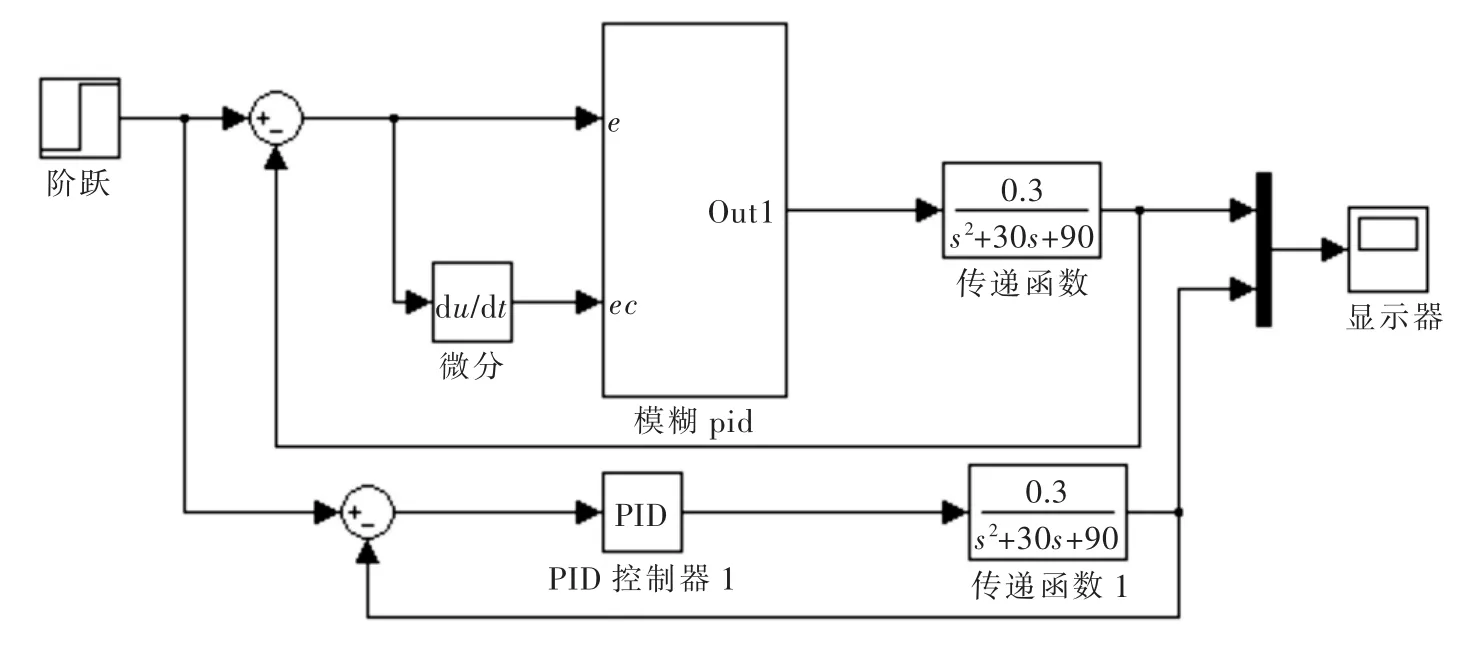
图5 控制系统SIMULINK模型Fig.5 Control system of SIMULINK model

图6 模糊PID控制系统的响应曲线Fig.6 Response curve of fuzzy PID control system
3 (釜内)温度-(夹套)温度串级控制的设计及仿真
3.1 串级系统设计
在单回路控制系统中,“冷剂阀至釜内温度传感器”的控制通道太长,会引起检测滞后;“控制器至釜内温度”控制通道很长,也会造成控制滞后.因此在反应釜这种存在较大纯滞后和干扰反复出现的情况下,无论模糊自适应PID控制器采取怎样的控制作用,仍不能及时调节温度.而串级控制可以通过缩短控制通道来克服这些滞后,进一步提高控制质量[11-13].
设釜内温度为主被控量,夹套温度为副被控量,冷剂流量为操纵变量,副控制器采用PID控制器,主控制器选用模糊自适应PID控制器,串级控制系统的各控制环节及其正反作用方式的确定如图7所示.
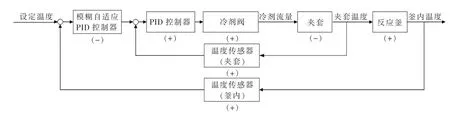
图7 反应釜温度串级控制框图Fig.7 Reactor temperature cascade control diagram
3.2 串级系统的仿真与分析
串级控制系统模型如图8所示,串级控制系统的响应曲线如图9所示.图9中曲线2表示单回路控制系统的响应曲线,曲线1表示串级控制系统的响应曲线,通过对比可以看出,串级控制系统比单回路控制系统的响应时间更短,且无超调,克服了原控制系统的纯滞后.
4 基于单片机的温度控制系统设计及仿真
将上述设计的模糊自适应PID算法及串级控制转换为C语言写入单片机AT89S52中,通过检测夹套和釜内温度,使单片机自动调用模糊自适应PID程序和串级程序控制步进电机转角以调节冷剂阀的开度,达到控制釜内温度的目的[14-16].基于单片机的proteus仿真电路如图10所示.通过仿真证明,此温度控制系统可以实现对釜内温度的精确控制.
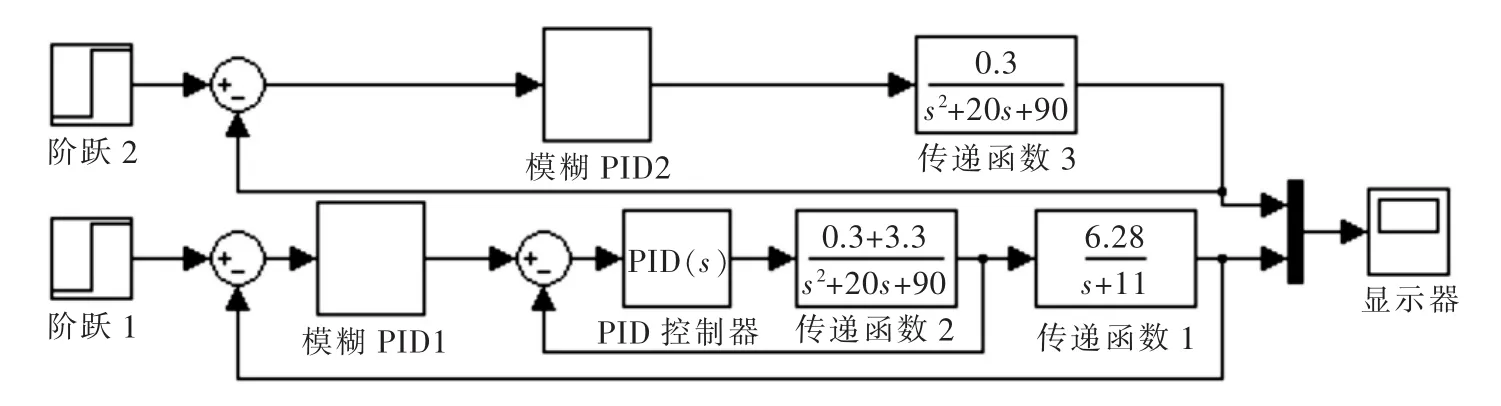
图8 串级控制系统SIMULINK模型Fig.8 SIMULINK model of cascade control system
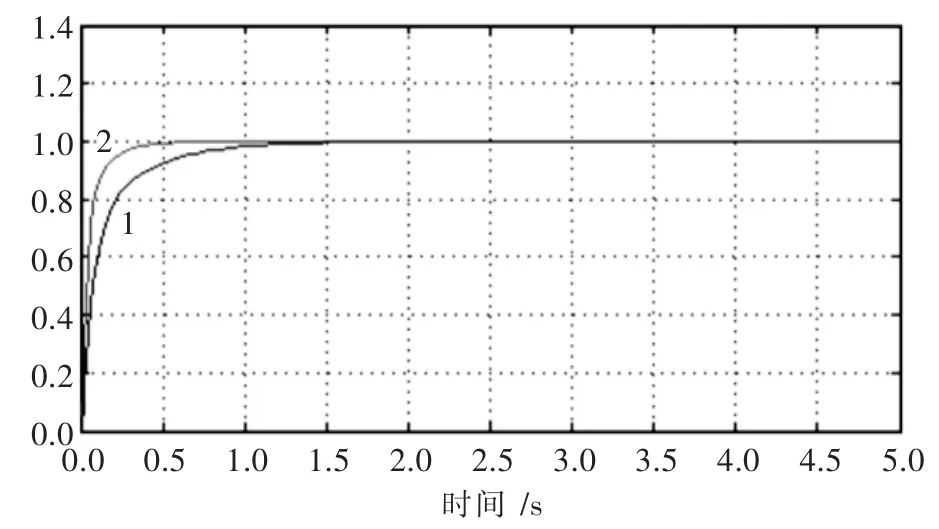
图9 串级控制系统的响应曲线Fig.9 Response curve of cascade control system

图10 单片机系统的仿真电路Fig.10 Simulation circuit of single chip microcomputer
5 结 论
1)将现场工艺与理论分析推导相结合,建立了反应釜温度控制系统的数学模型,并采用模糊控制与PID控制相结合的策略,在线自动整定PID参数,实现了系统自适应的要求;
2)采用串级控制手段,克服了反应釜的纯滞后,提高了系统的抗干扰能力;
3)以模糊自适应PID及串级控制算法为核心,设计了基于单片机的控制系统,可验证实现工艺过程的自动化.结果表明,控制系统提高了参数整定的精度和控制品质.
[1]赵中伟,李江涛,陈星宇,等.我国白钨矿钨冶炼技术现状与发展[J].有色金属科学与工程,2013(5):11-14.
[2]万林生,黄小晶,杨亮,等.钨酸钠溶液氢氧化钙苛化-沉淀白钨的研究[J].有色金属科学与工程,2014,5(4):23-27.
[3]宋善章.一种分解白钨矿的方法,中国,CN03118385.9[P].2003-05-14.
[4]Takashi Tijima,PYoshiaki Nakajima,Yasushi Nishiwaki,Application of fuzzy control system for reactor feed water control[J]. Fuzzy Sets and Systems,1995,74(l):381-383.
[5]Hah,Yung Joon Lee,Byong Whi.Fuzzy power control algorithm for a pressurized water reactor[J].Nuclear Technology,1994,106(2):242-253.
[6]何贵香 ,何利华,曹才放,等.氢氧化钠分解白钨矿的热力学分析[J].粉末冶金材料科学与工程,2013(3):368-372.
[7]罗小燕,蔡改贫,熊奇,等.白钨矿反应釜温度控制系统设计与仿真[J].中国钨业,2015(4):68-71.
[8]马泽宇,李季.基于模糊-PID的小型反应釜控制系统设计[J].自动化技术与应用,2013,32(12):29-34.
[9]马刚.一种小型反应釜模糊-PID控制系统研究[D].大庆:东北石油大学,2010.
[10]马琳,王建华.基于Matlab的模糊PID控制研究[J].现代电子技术,2013,36(3):65-67.
[11]Niu H,Zhang Q L,Yang C Y,et al.Variable structure control for three-variable autocatalytic reaction[J].Control Theory and Technology.2013,11(3):393-400
[12]Rute Caetano,Maria Amelia Lemos,Francisco Lemos.Modeling and control of an exothermal reaction[J].Chemical Engineering Journal.2014,238:93-99
[13]曾青云,汪金良,张传福.基于自适应模糊神经网络的铜闪速熔炼渣含Fe/SiO2模型研究[J].有色金属科学与工程,2011,2(1):5-8.
[14]王磊,李桂香,王元麒.基于Pt100热电阻的温度检测系统设计[J].中国仪器仪表,2014(12):33-35.
[15]卢超.基于Proteus的步进电机控制系统仿真设计[J].实验室研究与探索,2010,29(6):54-57.
[16]吴剑威,孔慧芳,唐立新.智能模糊自适应PID在化学反应釜温度控制系统中的应用[J].计算机与应用化学,2013(2):121-124.
Design and simulation of reactor system based on fuzzy adaptive PID
LUO Xiaoyana,YU Menga,CHEN Bina,MENG Pengyub
(a.School of Mechanical and Electrical Engineering;b.School of Materials Science and Engineering, Jiangxi University of Science and Technology,Ganzhou 341000,China)
To address the problems like high energy consumption,unstable product quality and simple control system of the low grad synthetic scheelite equipment in China,the temperature mathematic model was established based on the process requirements of the alkali autoclave process for scheelite.The cascade control system was constructed by applying the reactor temperature and jacket temperature respectively as the major controlling variable and supplementary controlling variable.The automation of alkali autoclave process for scheelite was realized by developing the intellective control system based on single chip temperature control system using adaptive fuzzy adaptive controller to choose the optimal parameters.Simulation experiments show that fuzzy adaptive PID control system has characteristics of quick response and good fault tolerance.The application of the temperature control system of cascade control can overcome the lagging effect of reactor and achieve precisely control of temperature in reactor by ensuring the stability of product quality.
scheelite;reactor;fuzzy adaptive PID;cascade control;single chip microcomputer;simulation
TH811.2;TF841.1
A
1674-9669(2015)05-0129-06
10.13264/j.cnki.ysjskx.2015.05.024
2015-05-08
国家自然科学基金资助项目(5146017);江西省自然科学基金资助项目(20132BAB206022);江西省高校科技落地计划项目(KJLD1304(45))
罗小燕(1967- ),女,副教授,主要从事机电系统智能监测与控制方面的研究,E-mail:LXY9416@163.com.
猜你喜欢
化工机械(2023年4期)2023-08-21 10:41:08
佳木斯大学学报(自然科学版)(2022年6期)2022-12-15 10:33:14
化工机械(2022年5期)2022-11-02 08:43:20
矿冶(2020年4期)2020-08-21 08:16:24
中国钨业(2019年2期)2019-10-21 09:30:02
纯碱工业(2018年5期)2018-10-19 06:07:38
中国有色金属学报(2018年2期)2018-03-26 07:58:45
石油化工建设(2017年2期)2017-06-05 08:52:52
工业设计(2016年10期)2016-04-16 02:44:12
化工装备技术(2015年1期)2015-04-12 01:20:04
