三指形旋转手爪的设计与实现
2015-03-14 01:09:54吴天强
机电信息 2015年12期
吴天强 徐 兵
(台州科技职业学院,浙江 台州318020)
0 引言
机器人末端执行器(手爪)是针对特定任务、特定被夹零件而设计的,手爪的通用性是装配机器人柔性的重要体现[1]。常用的二指或三指型手爪,依照抓手手指的运动方式分类,有平动和张角旋转两种。平动方式的二指手爪,手指运动范围较小;张角旋转方式的手爪,手爪指尖在运动过程中不能保持在同一高度,夹持细小物体时,对手爪运动控制要求高。
三爪自动定心卡盘采用圆锥齿轮副和平面螺纹副来实现增力夹紧,机床切削加工一般都是通过三爪、四爪卡盘夹持工件,其动作也都半依靠手动来实现,不但费时,且十分费力[2]。
本文设计的三指形旋转手爪,与张角旋转方式手爪或三爪自动定心卡盘相比较,降低了运动控制要求,提高了夹持动作的灵活性,可以抓取放置在平面上或套在定位杆中的物体,对于规则几何形状的物体具有自定心作用。例如,能夹取多种型号的螺母,完成螺母预装配等任务,适用于物体的抓取与搬运。
1 手爪结构设计
图1是三指形旋转手爪结构图[3]。手爪轴心是圆管2,细杆类等障碍物可以从圆管2中穿过。例如,将螺母旋进一根细长的螺丝,螺丝可以从空心管穿出。圆管2上开有槽孔,滑环1的电源线通过槽孔,与电机12连接。圆管2上装有轴承3、大摩擦轮4及圆柱环8。上支撑板6与下支撑板10分别由4颗沿圆周均匀分布的沉头螺钉7固定在圆柱环8上。电机12由3颗内六角圆柱头螺钉5及共用沉头螺钉7固定在上支撑板6上。

图1 三指形旋转手爪结构图
电机12为手爪手指夹紧与松开的动力源,该电机采用蜗轮蜗杆减速直流电机,利用蜗轮蜗杆的自锁特点及同步带的张力,使手爪具有断电夹持功能。同步带9带动3个沿圆周对称分布的同步轮17旋转,通过旋转臂16,使指尖15运动保持一致,3个指尖始终在同一平面,同步张开或收拢,实现手爪指尖同步自转。
电机21使用行星减速直流电机,直接驱动小摩擦轮19,带动大摩擦轮4,使三指形手爪整体旋转,实现3个手指绕轴公转。滑环1通过电刷与电源相连,为电机12供电。电刷结构使三指形手爪整体旋转圈数不受电源连线限制。摩擦轮用于限定传动力矩的上限,当发生旋转卡死时,不使电机21堵转发热而损坏。
手爪固定板11是手爪整体与其他机械装置相连接的固定部件。
2 力学特性分析
图2是手爪抓取圆形物体时指尖受力平面投影后的示意图。
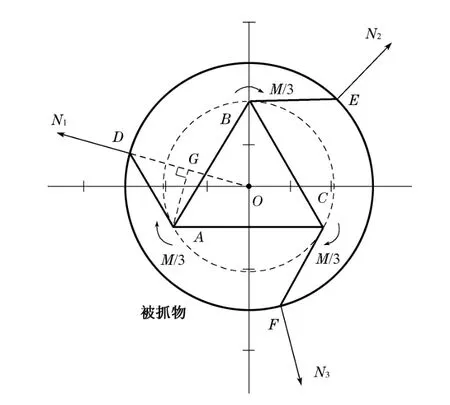
图2 手爪夹持圆形物体受力示意图
图中设手爪与被抓物均为刚体,并将受力投影到同一水平面。A、B、C三点为指尖自转轴心,AD、BE、CF是旋转臂的长度,D、E、F为手爪指端与被抓物的夹持点,设各点的弹力分别为N1、N2与N3,AG为N1的力臂。夹紧电机输出扭矩为M,被抓物重力为G。设为理想状态,由对称性,每个旋转手指分配的扭矩为M/3,夹持点弹力N1=N2=N3,以A点为瞬心得:

式中,f为抓手手指与被抓物之间的静摩擦力;μ为最大静摩擦因数。

满足式(4)时,手爪可以竖直夹持并提起被抓物体。
由以上分析可知,旋转手爪有以下3个特点:(1)夹紧电机输出扭矩保持一定时,力臂越小,可夹持提升物的重量越大;(2)手指AD张开与AO在同一直线时,力臂为0,抓手处于自锁状态;(3)爪手指尖收回到原点时,手指与被抓物之间的弹力取最小值,此时,被提升物重量最小。
3 试制结果
图3是三指形旋转手爪实物原型照片,同步轮型号为XL10,同步带为XL80齿。3个手指自转轴之间的轴心距为AB=BC=CA=50.77mm;旋转臂长AD=CF=BE=30mm;指尖长30mm;手爪最大张角位置时,指尖所在圆的直径120mm。
原型手爪可以顺利抓取平面放置的6310深沟球轴承、M20平垫圈、M16六角螺母等大小、厚薄各不相同的物体,藉由手指的绕轴公转功能,完成螺母初装配等任务。将手爪指端加以修正,使其收拢时完全闭合,可以抓取细线等细小物体。

图3 手爪实物原型照片
[1]汪新中.平面关节型装配机器人拧螺钉手爪的研究[J].机电工程,2008(6):18~20
[2]卢学玉,常德功.分体式三爪卡盘的设计[J].机械设计与制造,2005(1):29~30
[3]吴天强,徐兵,刘二强.三爪旋转抓手:中国,201320343354.7[P].2013-11-20
猜你喜欢
内燃机与配件(2022年2期)2022-01-17 23:46:44
钢管(2021年2期)2021-11-30 02:11:01
电子制作(2018年24期)2019-01-03 02:30:30
制造技术与机床(2018年12期)2018-12-23 02:41:06
制造技术与机床(2017年6期)2018-01-19 02:41:06
荣誉杂志(2017年7期)2017-08-23 08:05:59
制造技术与机床(2017年2期)2017-05-04 04:17:34
天津城建大学学报(2015年5期)2015-12-09 01:26:50
橡胶工业(2015年6期)2015-07-29 09:20:32
机械工程师(2014年12期)2014-12-23 06:44:04