
火星移动智能体技术探讨
2015-03-13 06:51王琼贾阳陶灼吉龙王昊予赵蕾
航天器工程 2015年4期
王琼 贾阳 陶灼 吉龙 王昊予 赵蕾
(1 探月与航天工程中心, 北京 100037) (2 北京空间飞行器总体设计部, 北京 100094)
火星移动智能体技术探讨
王琼1,2贾阳2陶灼2吉龙2王昊予2赵蕾2
(1 探月与航天工程中心, 北京 100037) (2 北京空间飞行器总体设计部, 北京 100094)
在火星表面巡视探测任务中,环境的复杂性、火地之间遥远的距离和探测器的安全性要求,决定了火星车必须具有较强的自主能力,自主实现环境感知、路径规划、科学探测、故障诊断等功能。移动智能体技术的发展和应用,为上述功能的更好实现提供了可能。文章通过对火星车自主能力的发展历程进行调研,结合当前我国巡视器技术的发展状况,从任务规划、能源管理、热控管理、通信管理等方面对火星移动智能体技术的应用需求进行了分析,提出了一种采用三层递阶式体系结构的解决方案框架,可为火星乃至其他地外天体移动智能体的技术实现提供参考。
人工智能;移动智能体;火星车;火星环境;自主
1 引言
火星是太阳系内与地球最为相似的星球,曾经存在过乃至仍然可能存在液态水[1],并且可能存在过生命。这些重大的科学发现和科学问题,使得火星成为相当长时间内人类深空探测的持续热点区域。世界主要航天国家和组织纷纷制定了规模宏伟、形式多样的火星探测计划。利用火星车(巡视器)进行火星表面巡视探测,能够克服着陆误差的影响,接近所关注目标进行近距离探测,拓展了探测范围,提高了探测精度,丰富了探测手段,已经成为继环绕遥感、着陆探测之后火星探测的主要手段。
火星表面的尘暴、低气压和低温环境,是火星车必须克服的问题[2]。地火之间距离遥远,通信时延长达几十分钟,加上星体遮挡的影响,使得通信窗口受限,火星车遥操作效率很低。一旦火星车遇到危险状况,地面操作人员无法及时获悉,而当火星车收到地面发出的处置命令时可能已经失控。这种依靠地面进行天地大回路控制决策的工作方式效率十分低下,难以满足火星巡视探测任务需求。因此,火星车必须变得更加智能,自主感知危险、迅速决策并执行恰当的应对措施,及时化解风险。
从1955年正式提出人工智能概念[3]算起,近60年来,人工智能技术取得了长足的进步,已经发展成为一门应用广泛的交叉和前沿学科。现在的人工智能系统也已经变得十分“聪明”,例如,2011年2月,IBM公司的超级计算机“沃森”在电视智力竞赛节目中战胜两名最优秀的人类冠军对手;谷歌公司研制的自动驾驶汽车已经上路行驶逾百万千米,尚未发生任何事故。1986年,Marvin Minsky教授在《Society of Mind》一书中提出了“智能体”[4]的概念。所谓智能体,是指通过感知手段获得所处环境的信息并通过执行器完成行为或行为序列,进而对环境产生作用,实现任务级目标的计算实体,包括移动智能体、非移动智能体、软件智能体等[5]。其中移动智能体技术是在自动导引车、地面机器人、无人作战平台、地外天体巡视器的自主导航控制技术发展过程中逐渐形成的。
将人工智能领域中的移动智能体技术应用到火星车上,能够提高火星车的自主能力,保证火星车安全高效地运转,降低地面团队工作强度,扩大科学数据产出量,具有重大意义。
本文对火星车的自主能力需求进行分析,包括自主任务规划、自主能源管理、自主热控管理、自主通信管理等方面,提出了采用移动智能体技术满足火星车任务需求的技术方案框架。
2 火星车自主能力的发展历程
迄今为止,成功抵达火星表面并开展巡视探测的火星车共有4辆,均为美国研制。
1)索杰纳号
火星探路者(Pathfinder)任务使用的索杰纳号(Sojourner)火星车,于1996年12月发射,控制模式采用遥控方式[6]。地球和火星之间的时延使得地面人员不能实时控制索杰纳号。火星车通过着陆器与地面进行周期性的通信, 火星车仅执行简单的命令序列。着陆器与地球之间的通信每天进行两次,每次2 h,火星车遥测分析是由地面火星车控制工作站完成的,当火星车每天工作结束时,地面科学家小组利用火星车和着陆器拍摄的图像,指定火星车下一步运动的目标位置及移动路径。索杰纳号有限的自主能力主要体现在自主地形穿越、突发事件处理和资源管理三个方面。
2)勇气号和机遇号
火星探测巡视器(Mars Exploration Rover, MER)任务中使用的火星车勇气号(Spirit,2003年6月发射)和机遇号(Opportunity,2003年7月发射),主要工作模式是自主导航加遥操作[7]。具体来说,MER的任务执行模式是以每个火星日为周期来开展的,早晨发送的命令序列基于前一天传回的图像和数据,由地面遥操作科学家小组处理,专门用于当天火星日的活动。活动结束后,火星车将获得的图像和数据传回地面。每个火星日的活动时间大约为4 h,一般集中在中午时分。MER的自主性解决了数小时的无人监测、复杂地形的运动控制等难题。
3)好奇心号
火星科学实验室(Mars Science Laboratory, MSL)任务中使用的火星车好奇心号(Curiosity,2011年11月发射),主要工作模式是长距离自主导航加遥操作[8],且器上有强大的在轨软件维护能力,可以实现使其工作模式由飞行状态转换到火星工作状态。好奇心号在火星行走时所进行的高效路径规划决策,以及在采样过程中对机构的精准控制,均由器上自主完成。
从三代火星车的技术发展历程看,随着运载能力的提高和进入、下降与着陆(Entry, Descent and Landing, EDL)技术的创新,火星车已经从小型(10 kg级)发展到中型(100 kg级),并进一步向大型(1000 kg级)火星车发展。随着敏感器、车载计算机和导航控制算法的发展,火星车的自主能力越来越强,从只能完成简单的任务,发展到可以完成比较复杂的科学探测任务,所需人工干预越来越少,效率则越来越高,已经从遥控型,逐渐发展到遥操作型、智能体型火星车。图1表示已成功发射的月球车、火星车的自主技术发展历程。可以预见,未来的火星车将具有更强的探测能力、更快的移动速度、更好的地形适应能力以及更强的自主能力。

图1 巡视器的自主能力发展Fig.1 Development of rover autonomous capability
3 火星移动智能体技术需求分析
火星移动智能体(即智能火星车,以下部分场合简称“火星车”)既是一种具有高度智能化的巡视器,也是一种运行在火星表面特殊环境中的移动机器人,还是一种结合了软件和硬件的移动智能体。如图2所示,火星移动智能体是巡视器技术、机器人技术、智能体技术集成发展的结果。结合这三者的特点,火星移动智能体应当具有移动性、适应性、自主性、主动性、社会性、进化性等6个基本特性[9-10]。
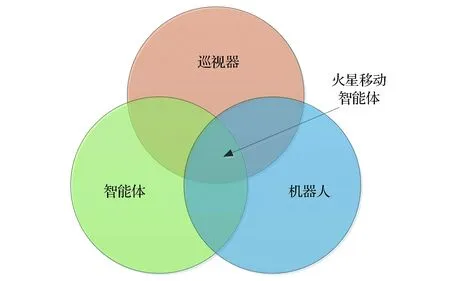
图2 火星移动智能体与巡视器、智能体、机器人的关系Fig.2 Relationship among Mars intelligent mobile agent, rover, agent and robot
基于对火星表面巡视探测任务的认识和当前我国巡视器技术的发展状况,梳理出火星移动智能体技术需求如下。
3.1 任务规划
火星移动智能体的任务规划,需在满足火星表面地形和环境、星历、火星车工作能力和分系统自主控制需求等一系列约束的前提下,合理高效地规划出火星车从初始状态转换到目标状态的行驶路径点和行为序列,保证其安全有效地完成各种工程任务和科学探测活动[11]。火星车状态可包括位置、能源状况、温度水平、通信条件及其他资源占用情况,状态间的转换是通过行为来实现的,包括感知、行驶、充电、科学探测、数据传输、休眠等。任务规划既需要规划路径,又需要调度安排行为。行为与路径是高度耦合的。路径的选择直接影响了沿路径安排的行为内容和时序,而行为的安排也会影响路径的选择[10]。
行为规划应允许并行行为,比如火星车在行驶的同时,太阳翼对日定向进行充电,定向天线对轨道器定向进行数据传输。路径规划通常需深入分析火星地形的可通过性和适宜度,并且融合获得全局通过性。
3.2 自主能源管理
火星移动智能体的自主能源管理功能主要包括:
1)能量平衡估计
火星移动智能体根据任务计划和系统当前状态(蓄电池组放电深度等),结合星历预估一段时间内(通常为24 h)火星车的电能收支平衡情况。在这个过程中,如果能源一直处于安全状态,则无需采取措施;否则需要缩短大功率设备的工作时间来降低电能消耗,或者将大功率设备调整到电能充裕时工作来实现收支匹配,或者调整太阳翼指向以扩大电能输入。
2)太阳翼指向的一维调节
在不调整火星车航向的情况下,一维调节太阳翼指向,以获得尽可能大的发电功率。这种调节的效果与航向相关,当航向为正东或正西时,正午时获得的峰值电能最大,但从一个火星日的综合效果来看,调节所带来的收获较小;当航向为正南或正北时,整个火星日内的综合收获较大。
根据星历、火星车所在位置经纬度、车体姿态等参数,计算出太阳翼最佳指向,并进行调节。若制导、导航与控制(GNC)分系统提供的姿态参数不可信,还可以采用太阳扫描法,在允许的范围内转动太阳翼,寻找太阳翼发电电流最大的最佳指向。
随着太阳的运动,太阳翼最佳指向将发生变化,需要及时更新最佳指向数据。这些计算可以在火星车上完成,也可以由地面或轨道器计算完成,并将转动角度随时间的变化关系序列传送给火星车。也可以利用太阳翼发电电流进行反馈环路控制,保持太阳跟踪状态。
3)太阳翼指向的二维调节
在太阳翼输出功率由于火星尘沉积等原因出现大幅度下降的情况下,为了最大程度地获得电能,需要实现太阳翼指向的二维调节。但是在火星车上配置太阳翼二维转动系统,代价太大,因此一般是通过调整车体航向加上太阳翼一维转动的方式来实现二维调节。但这样会对车体航向产生限制,导致工作效率降低。特殊情况下,可以通过分别在两个正交的航向上转动太阳翼进行太阳翼发电电流扫描,实现航向角的粗略确定。
4)系统低功耗模式
为了确保能源安全,当蓄电池放电深度大于某阈值(如60%)时,系统进入最小工作模式,只有中心计算机、测控应答机等少量设备工作,保持可以接收地面指令的状态,其它设备均关机。
5)系统休眠
在长时间尘暴等极特殊情况下,火星车的能源状况进一步恶化(如蓄电池放电深度大于80%),且预期在短时间内无法得到改善,则全系统断电,进入休眠模式。直到光照条件得到改善,太阳翼发电功率超过某阈值,系统自主唤醒,进入充电模式。
6)电源系统数学模型自学习
太阳翼输出功率将随着火星尘沉积而变化,火星移动智能体可以建立能源预估模型,并根据实际运行过程中太阳翼输出功率的衰减情况进行自学习,提高能源平衡估计的准确性。
3.3 自主热控管理
加热回路控制是航天器普遍具备的功能。通常设置高温和低温2个温度阈值,如果传感器温度测量结果低于低温阈值,则启动加热回路;如果高于高温阈值,则断开加热回路;处于两者之间时,维持当前状态不变。从可靠性角度考虑,加热回路通常设计有备份,可以在确认主份故障的情况下再使用备份,也可以通过设置合适的温度阈值的办法,在主份无法达到控制效果的时候,备份自主参与工作。
除此之外,火星移动智能体需实现的热控管理功能包括:
1)服务热控的航向调整
尽管中午时火星土壤温度最高只有30 ℃,但如果火星车上大功率设备长时间工作,会产生设备温度过高的问题。这种情况的应对策略是,将车头方向调整成东西方向,自主控制竖起阳面的太阳翼,形成遮阳伞,减少对车体的热量输入,创造有利于设备散热的条件。
2)服务热控的侧倾角调整
若火星车配置了主动悬架,当常规热控手段无法满足要求时,可以通过车体侧倾角的调整,提高热控制能力。在保持航向与阳光方向近似垂直的情况下,如果需要提高车体温度,则调整侧倾角使得车体向朝阳方向侧倾,反之,向背阳方向侧倾,有利于降温。侧倾角调整范围在±10°之间。
在更极端的情况下,还可以通过车轮刨土的方式,建立局部地形,实现俯仰角、侧倾角的调整,改善热控条件[12]。通过这种方式的姿态角调整范围通常在±3°之间。
3)服务热控的工作模式调整
系统还可以通过任务规划,调整后续的工作模式、行为序列,实现整器温度水平的预先控制。当车体温度较低时,规划后续工作模式为通信、感知、探测等大功率模式,提高温度水平;反之,则规划后续进入小功率工作模式,并推迟大功率工作模式,降低温度水平。这种调整方式层次更高、带有预判性,能够将整器温度水平控制得更加平稳,因此也更加智能。
3.4 自主通信管理
火星移动智能体上通常设计了UHF频段、X频段的数传链路。UHF频段链路作为主用数传链路,实现对轨道器的数据传输,数据率适中,但传输距离有限,只有当轨道器处于近火星弧段时才能通信。出于简单方便考虑,UHF天线通常设计为固定天线,没有自主指向控制需求。X频段链路采用可转动式定向天线,可以实现直接对地传输,但数据率太低,难以满足常规数据传输需求,通常用于应急状态;也可以实现对轨道器的数传,数据率相对较高,但天线存在指向控制需求,当轨道器位于近火星弧段时,由于其方位角和高度角快速变化,对火星车定向天线提出了更高的指向控制要求。
1)码速率自适应
使用UHF频段数传时,由于通信距离的较大范围变化,相应地可以选用的码速率挡位差别也很大。为了在有限的时间内,尽可能传输更多的数据,需要根据链路裕度情况,实现码速率的自适应调整。
2)定向天线对地指向控制
对地指向的难点在于火星车定位精度较差的情况下,如何实现对地指向跟踪。实现方案是在地球附近的天区范围内进行螺旋扫描,扫描策略应考虑到地球运动轨迹,保证搜索范围能够覆盖。
3)定向天线对轨道器的指向控制
轨道器处于远火星弧段时,视运动角速度比较小,火星车定向天线对轨道器的指向控制策略可与对地指向控制策略相同。轨道器处于近火星弧段时,视运动角速度较大,火星车定向天线可以采用正交搜索策略,自主实现对轨道器轨迹的锯齿状跟踪。
4 实现方案框架
图3给出了火星移动智能体的实现方案框架。整个框架采用分层递阶式体系结构,自上而下分为智能规划层、导航控制层、驱动层三个层次。
(1)智能规划层主要是综合能源、热控、数据管理、通信、科学探测等方面的控制需求,通过任务规划顶层规划出火星移动智能体的目标点序列、行为序列和工作模式。其中,任务规划包括智能体能力描述模型、约束条件描述模型、搜索算法等模块,自主能源管理包括电量计、太阳翼输出功率分析自学习模型等模块,自主热控包括加热器控制等模块,自主科学探测包括科学仪器标定、智能探测等模块,自主数据管理包括星历计算、智能遥测、数传数据组织、智能压缩算法、码速率自适应算法、安全监测、故障诊断等模块。
(2)导航控制层根据任务规划结果,进行环境感知、建模,姿态、位置确定以及更精细的路径规划,给出各执行机构的控制策略。其中,导航控制层包括姿态计算、位置确定、移动里程估计、滑移率估计、图像三维恢复、可通过性分析、适宜度分析、全局通过性融合等模块,环境感知包括太阳敏感器、惯性测量单元、导航相机、避障相机等敏感器,机构智能控制包括太阳翼指向一维扫描、一维跟踪和二维控制,桅杆转动序列控制,定向天线扫描、跟踪,机械臂控制,机构运动安全锁等模块。
驱动层根据导航控制层给出的控制策略,通过控制器和驱动器,转化为相应指令,控制执行机构完成各项动作。其中,执行机构主要包括驱动轮、转向轮、主动悬架、太阳翼机构、桅杆机构、定向天线机构和机械臂等。
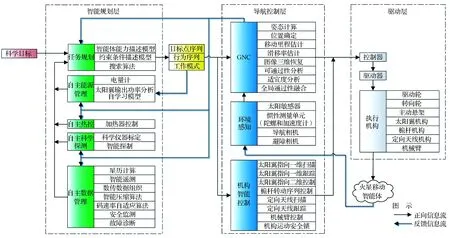
图3 火星移动智能体方案框架Fig.3 Framework of Mars mobile agent scheme
三个层次自上而下逐步分解任务,上一层的计算结果作为下一层规划的目标,通过分层求解的方法分解复杂的火星移动智能体规划和控制问题,完成从科学目标到指令单元之间的映射。三个层次自下而上逐步反馈信息,执行动作后的结果信息由下一层反馈到上一层,作为上一层的输入或者约束。比如,驱动层执行的动作将导致控制对象——火星移动智能体的状态变化,并通过敏感器的感知反馈到导航控制层;而导航控制层计算出的姿态和位置数据又将反馈到智能规划层,作为任务规划、能源管理、热控管理、数据管理、通信管理、科学探测管理等模块的输入条件或者约束条件。
5 结束语
在火星车上采用移动智能体技术,自主实现环境感知、路径规划、科学探测、故障诊断等功能,能够提高火星车工作效率和安全性,扩大科学数据产出量。从索杰纳号、勇气号和机遇号、好奇心号三代火星车的发展历程看,火星车已经从遥控型、遥操作型,逐渐发展到智能体型。基于对火星表面巡视探测任务的认识和当前我国巡视器技术的发展状况,本文对火星移动智能体在任务规划、能源、热控、通信等方面的自主管理需求进行了梳理,提出了采用三层递阶式体系结构的火星移动智能体实现方案框架。三个层次分别为智能规划层、导航控制层、驱动层,自上而下逐步分解任务,自下而上逐步反馈信息。但具体的技术实现途径仍需开展进一步深入研究。未来小行星、彗星探测等更加遥远的任务中,在一些关键环节探测器必须自主做出实时任务决策,智能体技术具有广泛的应用前景。
References)
[1]Martin Torres J, Zorzano M P, Valentin Serrano P, et al.Transient liquid water and water activity at Gale crater on Mars[J]. Nature Geoscience, 2015, 8(5): 357-361
[2]Barlow N G. Mars: an introduction to its interior, surface and atmosphere[M].Cambridge: Cambridge University Press, 2008
[3]Mccarthy J, Minsky M, Rochester N, et al. Proposal for the Dartmouth summer research project on artificial intelligence[J]. AI Magazine, 1955, 27(4): 12-14
[4]Minsky M. The society of mind[M].New York: Simon & Schuster Inc., 1986
[5]程显毅, 刘一松, 晏立. 面向智能体的知识工程[M]. 北京: 科学出版社, 2008
Cheng Xianyi, Liu Yisong, Yan Li. Agent-oriented knowledge engineering[M]. Beijing: Science Press, 2008 (in Chinese)
[6]Mishkin A H, Morrison J C, Nguyen T T, et al. Experiences with operations and autonomy of the mars pathfinder microrover[C]//1998 IEEE Aerospace Conference.New York:IEEE, 1998: 337-351
[7]Maimone M W, Leger P C, Biesiadecki J J. Overview of the mars exploration rovers’ autonomousmobility and vision capabilities[C]//2007 IEEE International Conference on Robotics and Automation, New York:IEEE, 2007
[8]Grotzinger J P, Crisp J, Vasavada A R, et al. Mars Science Laboratory mission and science investigation[J]. Space Science Reviews, 2012, 170(1-4): 5-56
[9]Wooldridge M J, Jennings N R. Intelligentagent: theory and practice[J]. Knowledge Engineering Review, 1995, 10(2): 115-152
[10]王琼, 于登云, 贾阳. 星球巡视器任务规划技术发展综述[J]. 航天器工程, 2014, 23(5): 245-253
Wang Qiong, Yu Dengyun, Jia Yang. Review on mission planning technologies of planetary rover[J]. Spacecraft Engineering, 2014, 23(5): 245-253 (in Chinese)
[11]Li Q Z, Jia Y. Research on mission planning of teleoperation system of lunar rover[C]//Proceedings of Global Lunar Conference, Beijing: IAF, 2010
[12]Sun Z Z, Jia Y, Zhang H. Technological advancements promotion roles of Chang’e-3 lunar probe mission[J]. Science China Technological Sciences, 2013, 56(11): 2702-2708
(编辑:张小琳)
Discuss on Mars Mobile Agent Technologies
WANG Qiong1,2JIA Yang2TAO Zhuo2JI Long2WANG Haoyu2ZHAO Lei2
(1 Lunar Exploration and Space Engineering Center, Beijing 100037, China) (2 Beijing Institute of Spacecraft System Engineering, Beijing 100094, China)
In Martian surface roving exploration missions, because of environmental complexity, long distance between Mars and earth and safety requirement of the probe, Mars rover is required high autonomous capabilities including environment sensing, path planning, scientific exploration, fault diagnosis etc. The development and application of mobile agent technology provide a better implementation approach of these functions. In this paper, development process of autonomous capabilities of Mars rovers is firstly overviewed. By combining with the state of the art of rover technology in China, the application requirements of Mars mobile agent technologies in terms of path planning, energy management, thermal control and communication management are analyzed. A solution frame adopting three-layer hierarchical structure is proposed to serve as a reference for technological realization of the mobile agents on Mars and even other extraterrestrial celestial bodies.
artificial intelligence; mobile agent; Mars rover; Mars environment; autonomy
2015-06-17;
2015-07-05
国家重大科技专项工程
王琼,男,硕士,高级工程师,从事月球与深空探测总体设计、星球巡视器任务规划、深空测控通信技术等研究。Email:wangq2006@163.com。
V448.2
A
10.3969/j.issn.1673-8748.2015.04.005
猜你喜欢
海外文摘(2021年7期)2021-08-31
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
太空探索(2021年6期)2021-06-16
小哥白尼(神奇星球)(2020年12期)2021-01-18
军事文摘(2020年18期)2020-10-27
大科技·百科新说(2020年10期)2020-03-01
福建基础教育研究(2019年6期)2019-05-28
少年科学(2006年2期)2006-02-20
