
遥感相机通信适配器的设计与实现
2015-03-12 10:27:50何欣黄金泽崔艳召
航天返回与遥感 2015年5期
何欣 黄金泽 崔艳召
(北京空间机电研究所 北京 100094)
0 引言
目前我国在轨、在研遥感相机计算机控制系统的通信接口有多种类型,例如早期的存储器加载指令通信接口,使用较多的CAN总线通信接口和1553B总线通信接口[1]等。遥感相机的研制也都是针对所对应的卫星平台进行,所研制的遥感相机计算机控制系统通信接口与星务计算机控制系统的通信接口类型均一致,以保证二者间的正常通信。随着遥感卫星用户及任务量的增多,对遥感相机的性能及研制时间都提出了更高的要求,为满足用户的进度需求,搭载符合用户需求的已研制成型的遥感相机不失为一个好的解决办法。但遥感相机的通信接口有多种形式,当卫星平台搭载已研制成型的遥感相机时,因遥感相机控制计算机通信接口与遥感卫星星务计算机系统通信接口类型不一致,导致遥感相机与卫星平台无法连接。
通常,解决星务计算机系统与遥感相机计算机控制系统的通信接口类型不一致的方法有三种:
1)方案1:对遥感卫星的星务计算机系统通信接口进行改造,使其与遥感相机计算机控制系统通信接口一致;
2)方案2:对已成型的遥感相机计算机控制系统通信接口进行改造,使其与遥感卫星的星务计算机系统通信接口一致;
3)方案3:只按照遥感相机计算机控制系统与星务计算机系统之间通信接口的约定研制一种通信适配器,使其能够完成通信接口和数据格式的转换,实现二者之间的通信。
前两个方案需对已定型的卫星平台星务计算机系统或遥感相机计算机控制系统的软、硬件进行重新设计,工程量巨大,研制周期较长,投入成本高。而方案3无需对已经成型的产品进行修改,只需按卫星平台星务计算机通信接口和遥感相机控制计算机通信接口要求,研制一台遥感相机通信适配器,利用遥感相机通信适配器完成星务计算机与遥感相机控制计算机间通信接口和通信格式的转换,实现卫星星务计算机与遥感相机控制计算机间的通信。此办法省时、省力、性价比高。但这种通信适配器比普通计算机中的适配器要复杂的多,没有现成的产品可用。
本文介绍中国空间技术研究院首次通过遥感相机通信适配器,解决卫星平台星务计算机系统与遥感相机计算机控制系统间的通信接口类型不一致的实例,为今后解决此类问题提供新的思路。
1 方案设计
某型号卫星平台因任务需求,需搭载已成型的遥感相机。所搭载的遥感相机计算机控制系统的通信接口为“CAN总线通信”接口,而卫星星务计算机系统的通信接口为“存储器加载指令通信”接口,二者的通信接口类型不一致,需通过遥感相机通信适配器解决以上问题。图1为用遥感相机适配器解决遥感相机控制计算机通信接口与遥感卫星星务计算机系统通信接口类型不一致的方案示意图。图中,GATE为门控,CLK为时钟,DATA为数据。
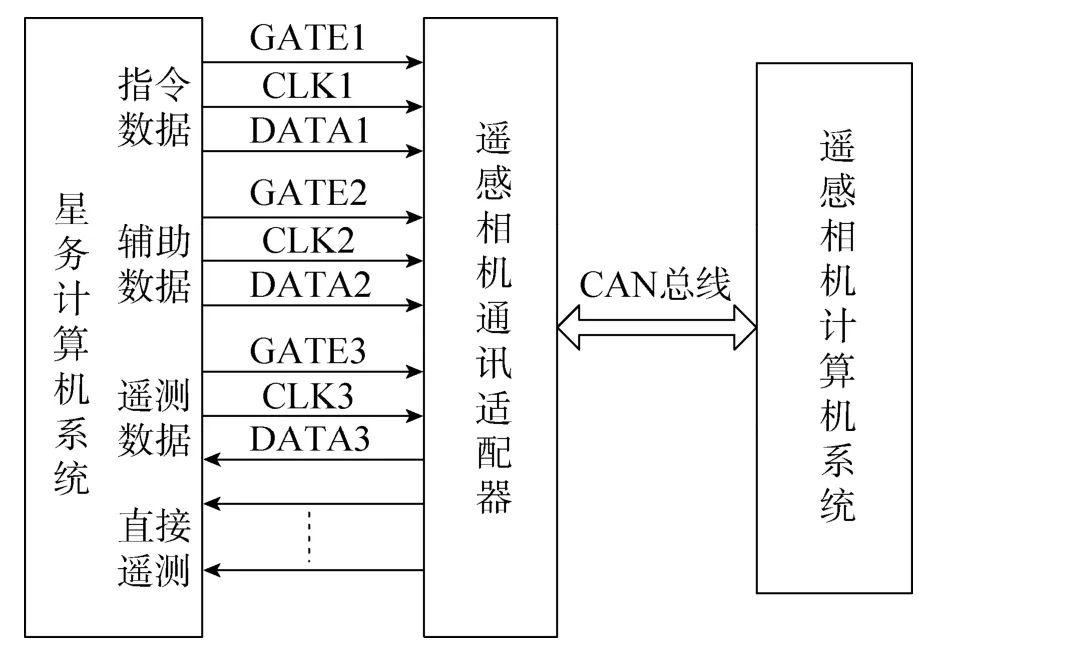
图1 方案示意Fig. 1 Scheme diagram
1.1 设计要求
按型号任务要求,遥感相机通信适配器需具备以下功能:接收卫星平台经“存储器加载指令通信”接口发送的3字节指令数据和7组16字节卫星辅助数据,并将接收到的指令数据和辅助数据,按遥感相机的数据约定格式,经CAN总线发送至遥感相机。同时经CAN总线通信接口,按遥感相机的数据约定格式发送遥测数据轮询指令,并接收遥感相机通过 CAN总线通信接口上传的遥测数据,之后将接收到的遥测数据按遥感相机数据格式约定分解为两部分,一部分转换为12组3字节串行遥测信号,通过存储器加载指令通信接口,按要求上传卫星平台;另一部分转换为双电平遥测信号,通过直接遥测通道上传卫星平台。遥感相机通信适配器除上述描述的主要功能外,核心电路及二次电源应具有冗余备份,可通过指令进行切换,应具备功耗低、体积小、可靠性高等特性。
图2为卫星平台星务计算机系统经“存储器加载指令通信”接口,分时下传的数据波形图。它们分别是:3字节(B0~B23bit)间接数据指令数据;由星上时间、全球定位系统(global position system,GPS)时间、GPS位置和速度数据、星敏数据组成的16字节(B0~B127bit)的辅助数据以及3字节(B0~B23bit)反映相机工作状态的遥测数据。这些数据均由门控GATE、时钟CLK和数据DATA三个接口信号组成,其中指令数据和辅助数据的门控、时钟和数据三个接口信号,均由星务计算机系统发送,而遥测数据,只有门控和时钟接口信号由星务计算机系统发送。
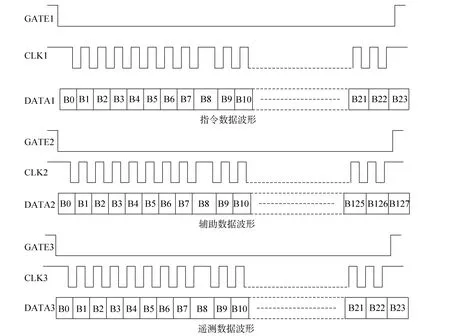
图2 数据波形图Fig. 2 Data waveform diagram
1.2 方案设计及选择
遥感相机通信适配器由主电路和二次电源模块组成,其主电路和二次电源模块均具有冗余备份,可通过指令进行切换。CAN通信总线按其遥感相机计算机控制系统通信接口要求,选用双路冗余CAN总线接口设计,以提高总线通信的可靠性。
在遥感相机通信适配器主电路设计架构的选择上,选用嵌入式系统架构设计[2-5],电路由微(计算机)控制器(micro controller unit,MCU)与CAN总线接口芯片及其他外围芯片构成[7-13]。与选用纯硬件电路架构设计相比,嵌入式系统设计更方便、灵活,在体积、功耗和可靠性上都优于纯硬件电路架构设计。在MCU的选择上,8031系列、数字信号处理(digital signal processing,DSP)系列等单片机[14-15]均符合要求,但考虑到技术的继承性,研发、调试、测试设备的支撑问题,还是选用低功耗80C31BH单片机。
主电路按其功能划分由3个部分组成:1)“存储器加载指令通信”接口和串/并数据转换部分;2)中央处理器部分;3)CAN总线通信部分。根据任务需求设计了两个方案,图3~4分别为主电路方案1和方案2工作原理框图。

图3 主电路方案1工作原理框图Fig. 3 Scheme 1 working principle block diagram
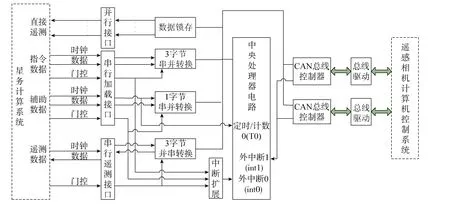
图4 主电路方案2工作原理框图Fig. 4 Scheme 2 working principle block diagram
两方案的不同点:
方案1:每帧16字节的辅助数据串/并转换部分,由16片8位串/并转换电路一次完成16字节辅助数据转换。
方案2:每帧16字节辅助数据转换上,用1片位转换电路完成1字节的数据串/并转换,通过中央处理器(central processing unit,CPU)定时/计数0(T0)口对辅助数据时钟(CLK2)的计数,判断1字节数据的转换完成,读取转换完成数据。CPU经16次上述读取,完成16字节的辅助数据转换。
方案2的设计减少硬件转换电路和地址扩展电路的使用数量,降低了电路功耗,减少了电路尺寸,提高电路了的可靠性,遥感相机通信适配器主电路选用方案2设计。
2 软件设计
通信适配器软件使用MCS51汇编语言编程,程序由主程序和3个中断程序,即外中断0(INT0)中断程序、计数(T0)中断程序和定时(T1)中断程序组成,程序流程图见图5~6所示。在中断程序设计上,根据星务计算机系统分时通信的时序特点和间隔时间要求,做到快进快出;对指令数据和遥测数据转换完成也只做标志字,数据的处理都安排在主程序中进行。辅助数据的读取进行3取2的数据比对和纠错设计,纠错设计是在主程序中设置辅助数据转换时间闸门,防止因辅助数据传送时丢数而造成的辅助数据接收错误。为了便于检测通信适配器的工作状况,将通信适配器软件的上电自检、数据的接收、发送等工作状态参数,加入相机直接遥测数据上传星务计算机,实时监测通信适配器运行情况。

图5 主程序流程Fig. 5 Main program flowing diagram
3 测试验证
为了验证产品性能指标是否符合技术要求,除完成了有关鉴定级环境试验(加速度试验、振动试验、冲击试验、热循环老炼试验、热真空试验)外,还做了遥感相机通信适配器与遥感卫星计算机系统间接口匹配试验;遥感相机通信适配器与遥感相机计算机控制系统间通信接口匹配试验,以及遥感相机通信适配器单机的通信试验。图7为遥感相机通信适配器地面单机通信实验的测试框图。卫星地面模拟装置模拟卫星平台工作状态发送指令数据、辅助数据和接收遥测数据;相机计算机控制系统模拟装置接收指令数据、辅助数据和上传遥测数据。试验时两装置将发送和接收的数据分类存入本装置,试验结束后将两装置存储的数据进行比对。试验传输数据量达Gbit级,均未出现因相机通信适配器导致的数据传输错误,数据正确达率 100%。同时遥感相机通信适配器与相机分系统还参与整星的各项试验,在这些试验中通信适配器均工作正常。试验结果证明,通信适配器功能、性能均符合技术要求。
4 结束语
本文介绍了利用遥感相机通信适配器,解决存储器加载指令通信接口的卫星平台搭载 CAN总线通信接口的遥感相机通信接口类型不一致的方法,此方法也得到了在轨飞行的充分验证。提供了解决卫星平台与遥感相机之间通信接口类型不一致的新途径,为今后解决此类问题做了成功的实践。
References)
[1] 龙志强, 李讯, 李晓龙. 现场总线控制网络技术[M]. 北京: 机械工业出版社, 2011: 7-1. LONG Zhiqiang, LI Xun, LI Xiaolong. Fieldbus Network Control Technology[M]. Beijing: Mechanical Industry Press, 2011: 7-1. (in Chinese)
[2] 方彦军. 嵌入式系统原理与设计[M]. 北京: 国防工业出版, 2010: 5-1. FANG Yanjun. Principle and Design of Embedded System [M]. Beijing: National Defense Industry Press, 2010: 5-1. (in Chinese)
[3] 何立民. 嵌入式系统的定义与发展历史[J]. 单片机与嵌入式系统应用, 2004, 4(1): 6-8. HE Limin. Definition of Embedded System and Its Development History[J]. Microcontrollers & Embedded Sysems, 2004, 4(1): 6-8. (in Chinese)
[4] 徐文明. 嵌入式系统结构特点[J]. 电测与仪表, 2004, 41(8): 48-49. XU Wenzhi.The Design Feature of the Embedded System[J]. Electrical Measurement & Instrumentation, 2004, 41(8): 48-49. (in Chinese)
[5] 彭慧伶. 嵌入式软件与硬件的集成测试过程研究[J]. 单片机与嵌入式系统应用. 2012, 12(12): 14-16. PENG Huiling. Research on the Integrated Testing Process of Embedded Software and Hardware[J]. Microcontrollers & Embedded Sysems, 2012, 12(12): 14-16. (in Chinese)
[6] 冯继超. 面向二十一世纪的嵌入式系统及发展方向[J]. 工业控制计算机, 2001, 14(5): 1-2. FENG Jichao. Face the Embedded System of 21st Century and Development Direction[J]. Industrial Control Computer, 2001, 14(5): 1-2. (in Chinese)
[7] 韩成浩, 高晓红. CAN总线技术及其应用[J]. 制造业自动化, 2010, 32(2): 146-149. HAN Chenghao, GAO Xiaohong. CAN Bus Technology and Its Application[J]. Manufacturing Automation, 2010, 32(2): 146-149. (in Chinese)
[8] 陆前锋, 刘波, 陈明昭. 基于SJA1000的CAN总线智能控制系统设计[J]. 自动化技术与应用. 2003, 22(1): 61-64. LU Qianfeng, LIU Bo, CHEN Mingzhao. SJA1000-based CAN-bus Intelligent Control System Design[J]. Techinques of Automation and Applications, 2003, 22(1): 61-64. (in Chinese)
[9] 韩党群. CAN控制器SJA1000及其应用[J]. 电子技术应用, 2003, 29(1): 66-68. HAN Dangqun. Principle and Application of CAN Controller SJA1000[J]. Application of Electronic Techinque, 2003, 29(1): 66-68. (in Chinese)
[10] 杨亮, 贾庆轩, 孙汉旭. 冗余CAN总线系统设计[J]. 机电产品开发与创新, 2007, 20(5): 4-6. YANG Liang, JIA Qingxuan, SUN Hanxu. The Design and Realization of the Redundant CAN Bus System[J]. Development & Innovation of Machinery & Electrical Products, 2007, 20(5): 4-6. (in Chinese)
[11] 杨福宇. 探讨CAN总线的抗干扰能力[J]. 单片机与嵌入式系统应用, 2008, (12): 12-15. YANG Fuyu. Introduction to Anti-interference Ability of CAN Bus[J]. Microcontrollers & Embedded Systems, 2008, (12): 12-15. (in Chinese)
[12] 崔艳召, 汤恩生, 许敬旺. TMS320LF2407系统设计及外扩CAN总线设计[J]. 航天返回与遥感, 2008, 29(2): 48-52. CUI Yanzhao, TANG Ensheng, XU Jingwang. Hardware Composition of Minimal System and CAN Bus Expansion Design Based on TMS320LF2407[J]. Spacecraft Recovery & Remote Sensing, 2008, 29(2): 48-52. (in Chinese)
[13] 丁力, 吴文婷, 徐萌萌, 等. 基于DSP技术和CAN总线的数据采集系统设计[J]. 测控技术, 2014, 33(10): 56-59. DING Li, WU Wenting, XU Mengmeng,et al. Design of Data Acquisition System Based on DSP & CAN[J]. Measurement & Control Technology, 2014, 33(10): 56-59. (in Chinese)
[14] 王友瑞, 刘芳, 戴葵, 等. 高可靠8051中系统管理单元的设计与实现[J]. 计算机工程与科学. 2008, 30(2): 115-118. WANG Yourui, LIU Fang, DAI Kui, et al. Design and Implementation of the System Management Unit in the Highly Reliable 8051[J]. Computer Engineering & Science. 2008, 30(2): 115-118. (in Chinese)
[15] 周文, 和敬涵, 毛志芳. TMS320VC33系统的硬件设计[J]. 微计算机信息, 2005, 2l(23): 81-82. ZHOU Wen, HE Jinghan, MAO Zhifang. The Hardware Design of TMS320VC33 System[J]. Control & Automation, 2005, 2l(23): 81-82. (in Chinese)
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16 06:05:06
英语文摘(2019年3期)2019-04-25 06:05:32
电子测试(2017年11期)2017-12-15 08:57:45
水利技术监督(2017年3期)2017-06-09 06:55:34
现代工业经济和信息化(2016年3期)2016-05-17 05:35:21
电源技术(2016年9期)2016-02-27 09:05:46
地矿测绘(2015年3期)2015-12-22 06:27:26
湖北师范大学学报(自然科学版)(2015年3期)2015-12-05 03:15:41
轻兵器(2015年20期)2015-09-10 07:22:44
航天返回与遥感(2014年4期)2014-07-31 17:47:47
