光纤陀螺开环增益的实时估计与补偿
2015-03-11 05:16刘淑荣李宗利何新科吴衍记
导航定位与授时 2015年3期
刘淑荣,李宗利,何新科,吴衍记
(北京自动化控制设备研究所,北京100074)
光纤陀螺开环增益的实时估计与补偿
刘淑荣,李宗利,何新科,吴衍记
(北京自动化控制设备研究所,北京100074)
开环增益是影响闭环光纤陀螺控制稳定性及控制精度的重要参数。从光纤陀螺的数学模型出发推导了开环增益的计算公式。在数字闭环光纤陀螺相关检测的基础上提出了一种开环增益的估计方法,通过在积分控制环节前施加一个方波抖动信号,然后在信号处理器中进行相关解调,实现了开环增益的在线实时估计。同时利用数字逻辑中比例控制系数的可操作性,通过实时调整比例控制系数K来补偿硬件部分增益G的变化,从而实现陀螺开环增益的自补偿。最后通过实验证明了该方法的正确性。
光纤陀螺;开环增益;估计;补偿
0 引言
陀螺仪是惯性导航系统的重要组成部件之一,用于敏感载体相对于惯性空间的旋转。光纤陀螺凭借其全固态、寿命长、灵敏度高、启动时间短、动态范围大、结构灵活、体积小、重量轻等优点,在国内外得到了迅猛发展,逐渐成为惯性仪表中的新宠,在航海、航空航天、石油钻井等领域备受青睐。
全数字闭环控制是目前国内光纤陀螺的主流方案,其控制系统可近似简化为一阶惯性环节。系统增益的变化,会影响控制系统的稳定性及控制精度。
在光纤陀螺的实际应用过程中,受变温、空间辐照等环境因素的影响,陀螺光路部分的损耗、电子元器件的性能都会发生变化,从而导致整个陀螺控制系统的增益发生变化,进而影响陀螺仪的频率特性以及测量精度。通常表现为陀螺仪输出噪声变大、容易进入死区等。因此,对陀螺仪的增益进行实时估计是判定陀螺仪当前工作状态是否良好的一个有效手段。
本文从闭环光纤陀螺的数学模型出发,推导了光纤陀螺增益的计算公式;提出了一种基于相关辨识原理的光纤陀螺开环增益估计方法,能够在不影响陀螺正常工作的情况下对陀螺仪的开环增益进行实时估计;同时,利用PI控制中比例控制系数KP在数字逻辑中方便可调的特点,实现了光纤陀螺增益的自补偿。最后通过试验验证了方法的有效性。
1 光纤陀螺的开环增益
数字闭环光纤陀螺原理示意图如图1所示,主要由信号检测光路和检测电路两部分组成。信号检测光路部分包括光源、耦合器、集成光学相位调制器(亦称Y波导)、光纤环和探测器,检测电路部分主要由前置放大电路、A/D转换电路、D/A转换电路和以DSP、FPGA为核心的数字信号处理电路组成。
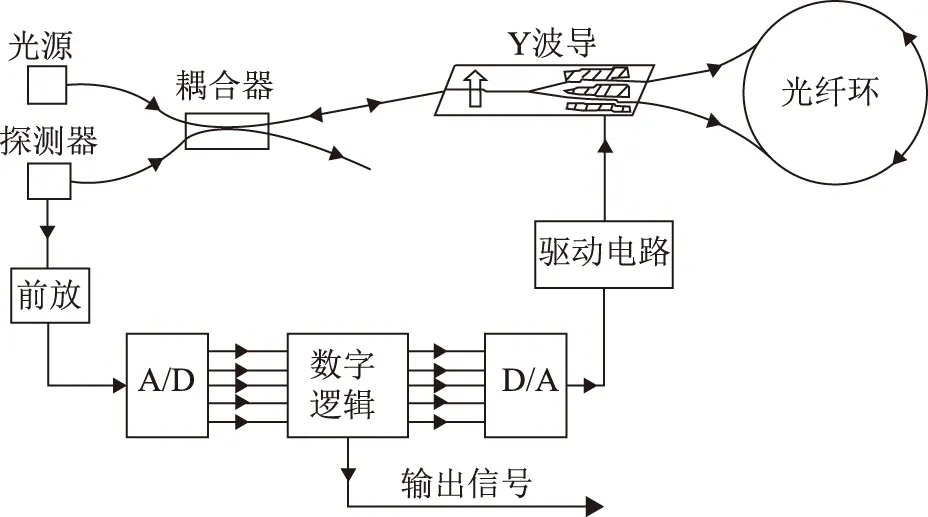
图1 数字闭环光纤陀螺的原理框图Fig.1 The scheme of digital closed loop fiber optic gyro
其工作过程如下:SLD光源发出的光,通过耦合器后进入Y波导,经Y波导起偏、分束、调制后分别沿正反方向进入光纤环,并沿顺时针和逆时针两个相反的方向传播;当两束光在光纤环中传播一周后重新汇集时产生干涉,干涉光经探测器转换成电压信号输出;探测器输出的电压信号经前放电路调理后送入A/D转换器进行采样及模数转换,然后由数字逻辑进行信号解算,得出当前角速率信息;同时将解算出来的角速率信息通过D/A转换,Y波导相位调制进行反馈控制,形成闭环。
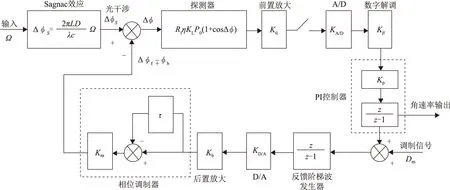
图2 数字闭环光纤陀螺仪动态模型Fig.2 The dynamic model of digital closed loop FOG
数字闭环光纤陀螺按功能可化分成角速率/相移转换、光干涉、光电转换、前置放大、模/数转换、数字解调、数字积分、阶梯波产生、数/模转换、后级放大、相位调制等环节。通过建立每一个功能模块的数学模型,最终可得到整个数字闭环光纤陀螺仪动态模型[1],如图2所示。图中Ω表示输入角速率,其余各参数的物理含义参见表1。
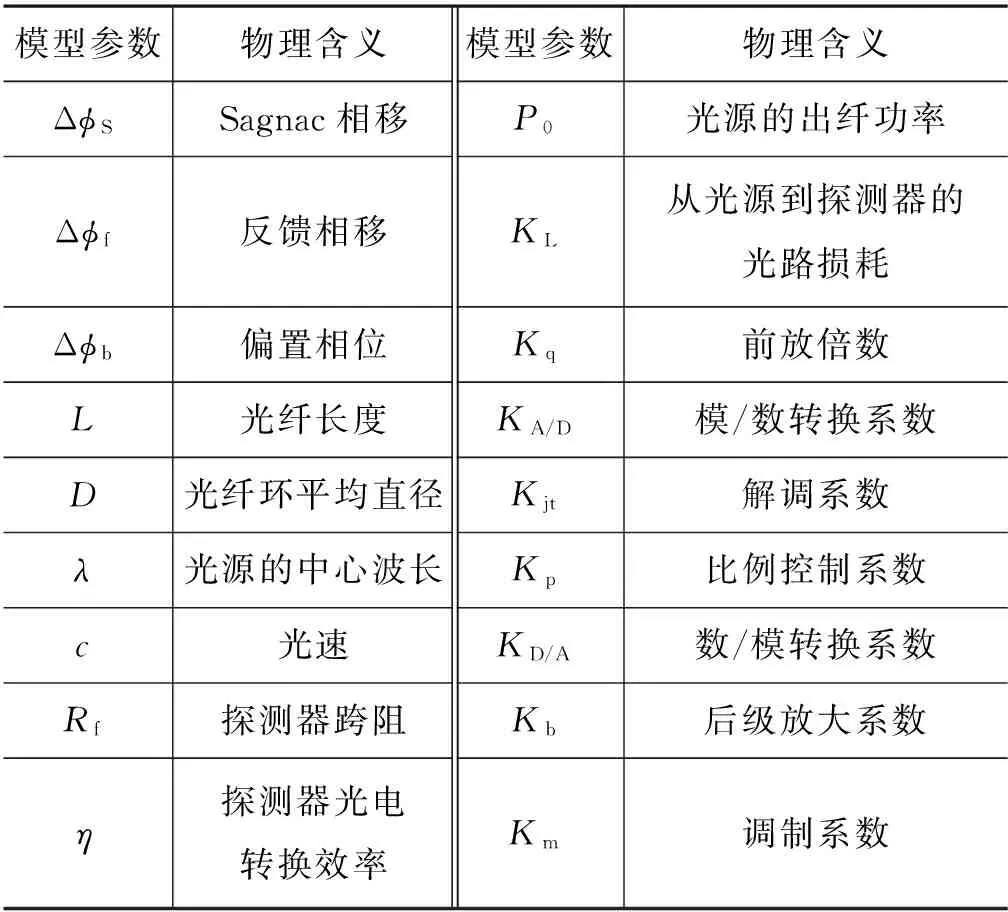
表1 模型参数及其物理含义Tab.1 Parameters in model and their physical meanings
通过一系列合理的等效近似与参数合并,可将模型简化成图3的形式[1]。从简化模型可以看出,数字闭环光纤陀螺系统为典型的一阶系统。系统的传递函数为
(1)
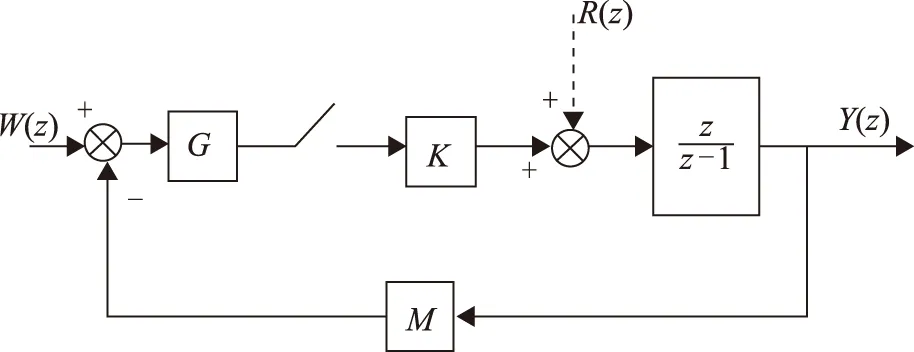
图3 简化模型Fig.3 The simplified model of FOG
GKM为系统的开环增益,其中G=2KjtKA/DKqKLRfηP0sinφb·2πLD/λc为前向通道增益;K=Kp为比例控制系数,可在数字逻辑中进行调整;M=KD/AKbKm为反馈通道增益,等于陀螺闭环标度因数的倒数。在陀螺实际工程应用中,受温变、辐照等环境因素的影响,光源的出纤功率P0、光路损耗KL等参数易发生变化,从而导致前向通道增益G发生变化。增益G的变化会影响陀螺的随机游走系数及死区特性。
2 开环增益的在线估计
2.1 相关辨识原理
对单输入单输出系统,其时域动态特性可以描述为[2]
(2)
其中:y(t)为输出,x(t)为输入,g(t)为系统的脉冲响应函数。根据维纳-霍普方程,输入x(t)的自相关函数,x(t)与y(t)的互相关函数之间存在如下关系
(3)
若x(t)为强度A的白噪声时,式(3)可简化为
Rxy(τ)=Ag(τ)
(4)
即输入信号为白噪声时,输入输出的互相关函数正比于系统的脉冲响应函数。
2.2 增益的在线估计
在图3所示的简化模型中,若在积分器的前端引入一个扰动信号R(z),则在陀螺输出端的响应Y′(z)为
(5)
根据终值定理,可计算得r(n)为阶跃信号时对应的系统稳态响应为

(6)
同理,可计算得当输入角速率信号w(n)为阶跃信号时对应的系统稳态响应为


(7)
从式(6)、式(7)可以看出,扰动信号r(n)引起的陀螺稳态输出与输入之间相差比例系数1/GKM,与G有关;而角速率信号w(n)引起的陀螺稳态输出与输入之间相差1/M,与G无关。根据这一结论,若能从陀螺输出端分离出扰动信号r(n)的系统响应,则可实现开环增益GKM的估计。
在实际工程应用中,经常使用m序列作为相关辨识的输入[2]。其统计特性近似为白噪声,均值为0,自相关函数为
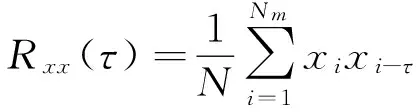
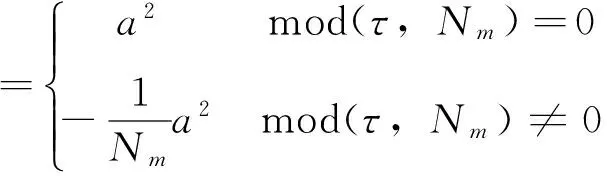
(8)
式中a表示幅值。
使用m序列作为增益辨识的输入,对AD采样得到的干涉信号按式(9)进行伪随机微分解调[3]
Qr(n)=rm(n)-rm(n-1)
(9)
rm(n)即为伪随机扰动序列。
陀螺仪采用方波调制,对应的角速率信息w(n)的解调方法为[3]
(10)
对伪随机解调信号与方波解调信号之间的相关性进行仿真计算,可知两个解调信号之间互相关系数很小[3]。因此,采用在积分环节之前增加伪随机扰动来实现陀螺开环增益估计的方法不会影响陀螺的正常工作。
3 增益变化的自补偿
光纤陀螺仪的开环增益由G、K、M三个参数组成。其中前向通道增益G易受环境的影响而发生变化,且为硬件特性变化,无法实时修正;K为比例控制系数,可在数字逻辑中方便地进行调整;M为反馈通道增益,亦为陀螺闭环标度因数的倒数,需保持稳定,否则将影响陀螺仪标度因数。
比较w(n)、r(n)两个信号对应的单位阶跃信号稳态响应结果可以看出,r(n)对应的单位阶跃信号稳态响应包含参数GK,w(n)对应的稳态响应与GK无关。因此,若能通过调整K来补偿G的变化,则同样能够实现增益GKM的稳定。
根据这一结论可得出,G=G1时r(n)对应的单位阶信号跃稳态响应为1/G1KM,G=G2时r(n)对应的单位阶跃信号稳态响应为1/G2KM,二者之差为(G1-G2)/G1G2KM,与G的变化量ΔG=(G1-G2)呈比例关系。由于G主要由陀螺硬件决定,无法将误差直接反馈到G参数上进行稳定控制,因此将误差项反馈至比例控制系数K,通过控制(G+ΔG)(K-ΔK)=GK来实现稳定陀螺开环增益的目的。其中ΔK=ΔG·x,x为增益的反馈控制系数。
闭环光纤陀螺增益自补偿系统框图如图4所示。图中K0=2πLD/λc。陀螺仪速率信号方波解调以及伪随机扰动响应信号的伪随机解调之间的低相关性,保证了增益误差的解算能够在不影响陀螺仪正常工作的情况下实时进行。
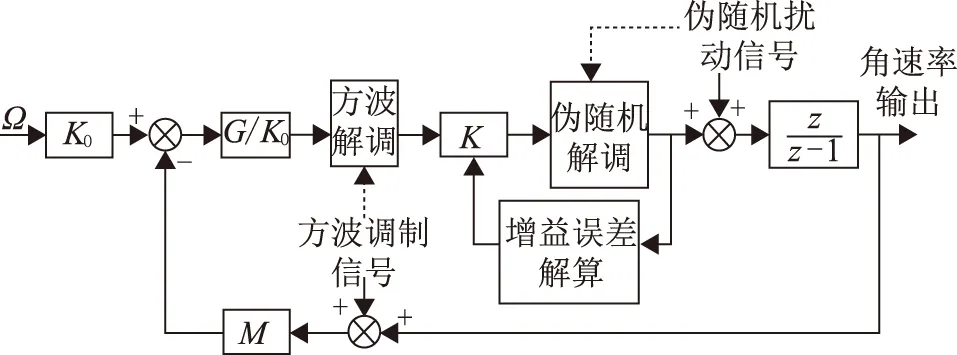
图4 闭环光纤陀螺增益自补偿系统框图Fig.4 The block diagram of closed loop FOG system with gain self compensation
4 试验验证情况
为了验证光纤陀螺增益在线估计及自补偿方法的正确性,搭建一套数字闭环光纤陀螺系统,使用电流可调恒流源给SLD光源供电。通过调节SLD光源的驱动电流来模拟光源在高、低温条件下光源自身出纤功率变化和光路损耗变化引起的G参数变化。逐渐减小SLD光源的驱动电流,让探测器直流电压从2.0V逐渐减小至1.7V,测试陀螺输出以及前向增益的实时估计与补偿结果。测试结果如图5所示。测试结果显示:陀螺仪增益G的变化与比例控制系数K的变化呈互补趋势,陀螺仪输出未受增益估计及补偿算法的影响。
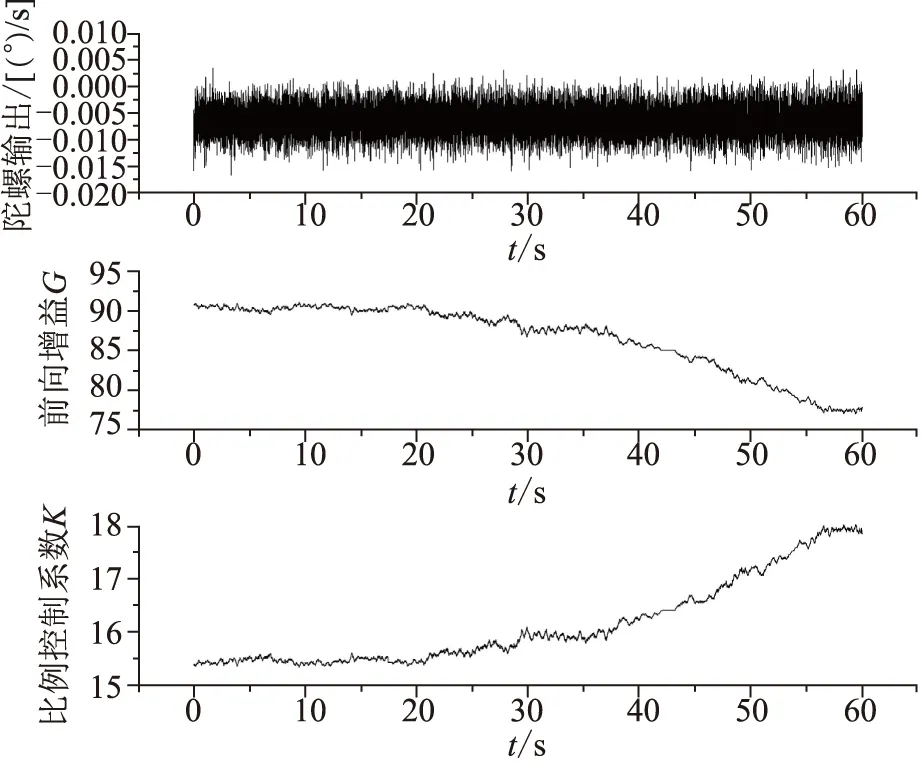
图5 探测器直流电压由2.0V逐渐减小至1.7V过程中前向增益的实时估计及补偿情况Fig.5 The result of real-time estimation and compensation on the open-loop gain of FOG when it’s volts d.c. of detector reduced from 2.0V to 1.7V
5 结论
通过在陀螺回路中积分器前端加入一个伪随机扰动信号,然后通过相关解调运算,能够在不影响陀螺正常工作的情况下对陀螺仪开环增益进行实时估计,从而实现对陀螺仪工作状况的实时监测。同时,利用数字逻辑中比例控制系数的可操作性,通过实时调整比例控制系数K来补偿硬件部分增益G的变化,从而实现陀螺整体开环增益的稳定。
实现数字闭环光纤陀螺仪开环增益的稳定控制,可以稳定陀螺仪的频率特性。虽不能直接改变陀螺的信噪比,但可以稳定陀螺中会受开环增益变化影响的相关信号,例如去死区调制解调信号,进而间接达到稳定陀螺输出噪声的目的。
[1]JunliangHan,ShengminGe,YiShen,XiangjunLi.ModelingandSimulationofDigitalClosed-loopFiberOpticGyroscope[C]//.Proceedingsofthe6thWorldCongressonIntelligentControlandAutomation,Dalian,China, 2006: 1659-1663.
[2] 候媛彬,汪梅,王立琦.系统辨识及Matlab仿真[M].北京:科学出版社,2004.
[3] 李敏,张春熹,宋凝芳.等.基于伪随机辨识的光纤陀螺前向增益估计[J].光电工程,2009,36(5):134-139.
Real-timeEstimationandCompensationoftheOpen-loopGainofFOG
LIU Shu-rong, LI Zong-li, HE Xin-ke, WU Yan-ji
(Beijing Automatic Control and Equipment Institute, Beijing 100074, China)
The open-loop gain is an important factor that affects the control stability and precision of Fiber Optic Gyro (FOG). A calculation formula of the open-loop gain is deduced based on the mathematic model of FOG. Based on correlation detection theory, a method is given to realize the real-time estimation of open-loop gain of FOG by adding a periodical square signal before the integral control unit and then acting correlation demodulation in the digital signal processor. The real-time compensation of the open-loop gain of FOG is also realized by adjusting proportional control coefficientKexpedientlyinthedigitalsignalprocessortocounteractthefluctuationofGbringingbyhardwarechange.Experimentsaredonetoprovethevalidityofthemethod.
FOG; Open-loop gain; Estimation; Compensation
2015 - 03 - 02;
2015 - 03 - 12。
刘淑荣(1982 - ),男,高级工程师,主要从事光纤陀螺技术研究。
E-mail: 88416211@qq.com
V
A
2095-8110(2015)03-0080-05
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
军民两用技术与产品(2022年3期)2022-06-05
燃料化学学报(2022年5期)2022-05-30
物流科技(2022年2期)2022-05-07
北京航空航天大学学报(2021年9期)2021-11-02
中华养生保健(2020年3期)2020-11-16
新课程·上旬(2020年3期)2020-08-07
无线互联科技(2019年10期)2019-08-06
百科探秘·航空航天(2017年9期)2017-12-31
百科探秘·航空航天(2017年9期)2017-11-07