
基于SimMechanics的4-UPS/PPU并联机构运动分析
2015-03-09 03:32:38季晔赵淑玲孙娟吴锐张旦闻
机床与液压 2015年21期
季晔,赵淑玲,孙娟,吴锐,张旦闻
(1.洛阳理工学院机械工程学院,河南洛阳 471023;2.驻马店高级技工学校,河南驻马店 463000)
基于SimMechanics的4-UPS/PPU并联机构运动分析
季晔1,赵淑玲2,孙娟1,吴锐1,张旦闻1
(1.洛阳理工学院机械工程学院,河南洛阳 471023;2.驻马店高级技工学校,河南驻马店 463000)
基于构型演变,在4-UPS并联机构中,增加一条PPU从动支链,得到一种4-UPS/PPU并联机构,从动支链限制了运动平台一个转动和一个移动自由度。根据机构的输入、输出关系,建立了机构的运动关系方程,利用求导法,得到了机构的速度和加速度Jacobian矩阵。利用SimMechanics工具箱建立了机构运动仿真模型,在给定输入条件下,得到了运动平台随输入的位置、速度和加速度变化规律。结果表明:运动平台运行平稳,与理论计算吻合。
四自由度;并联机构;运动学;SimMechanics
0 前言
近年来,国内外学者在机构型综合方面进行了深入研究,综合出了大量少自由度并联机构。四自由度并联机构在工业上有广泛应用,可以用于振动筛[1]和减震装置[2]等。逐一对这些新型机构进行运动分析需耗费大量时间,工作量庞大。SimMechanics是Matlab软件中Simulink工具箱的一个重要模块集。Simulink工具箱可以对各种机械和电子等动态系统 (连续系统,离散系统和混合系统)进行建模、仿真及实时控制,包含大量的标准化模块。文献 [3-6]完成了在输入为常量条件下的机构运动和静力学仿真。
本文作者以一种四自由度并联机构4-UPS/PPU为研究对象,分析了机构运动平台自由度,建立了机构输入、输出关系方程,利用求导法,得到了机构输入、输出速度和加速度关系。运用SimMechanics建立了机构仿真模型,在给定输入的条件下,得到了机构运动平台运动学参数随时间变化规律。
1 机构结构简图
并联机构简图如图1所示,各驱动支链结构为UPS型,固定平台与运动平台通过四条驱动支链和一条PPU结构的约束从动支链相连。
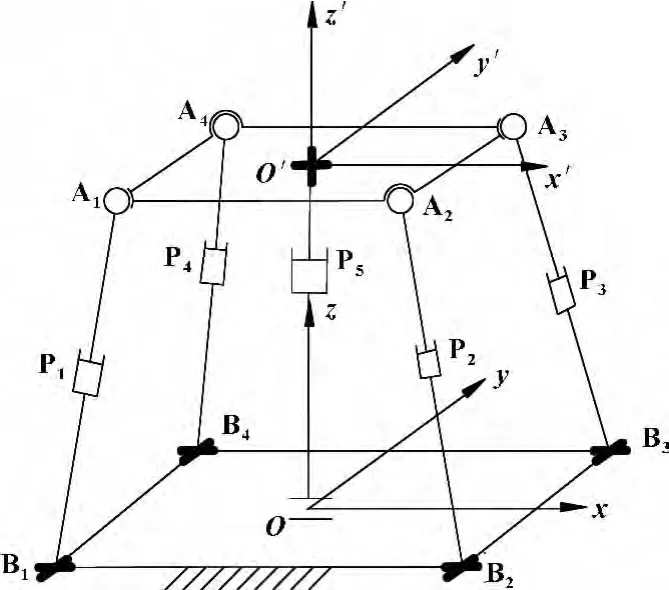
图1 4-UPS/PPU并联机构结构图
A1A2A3A4为运动平台,B1B2B3B4为固定平台,平台各铰点为矩形分布。运动平台和固定平台的坐标系方向如图所示,坐标原点均位于平台几何中心。在初始位置,运动平台几何中心O'处安装一U副,运动轴线分别平行于x轴和z轴;固定平台几何中心O处有一P副,运动轴线为x轴,从动支链中的另一P副运动轴线平行于z轴。
2 机构运动分析
UPS驱动支链对运动平台没有约束,PPU支链限制了运动平台绕y轴转动的自由度和沿y轴移动的自由度,运动平台自由度可以根据修正的Kutzbach-Grübler公式计算得到[7]。
运动平台具有两个转动自由度 (绕x轴和z轴转动),旋转变换矩阵为


其中:ωx、ωy、ωz为运动平台绕固定坐标系的角速度,角加速度εx、εy、εz为角速度对时间的导数。
3 建立仿真模型
SimMechanics是Simulink的一个模块,采用Sim-Mechanics可以对多体刚性机构进行运动学和动力学计算,该模块提供了大量的机构元件,包括刚体(bodies)、运动副 (Joints)、约束和驱动 (Constraints and Drivers)、作动器和传感器 (Actuators and Sensors),利用这些单个模块可以以自底向上的方式建立复杂的机械系统结构图,仿真后还可生成空间模拟图,能直观的观察到运动轨迹。采用SimMechanics建立并联机构仿真模型如图2所示。

图2 4-UPS/PPU并联机构的仿真模型
驱动支链输入运动规律为

SimMechanics的输入可以通过调用M文件实现,能方便的完成各种输入路径的编写。利用M文件输入驱动支链运动条件,运动平台位置变化情况如图3所示。

图3 运动平台位置变化曲线
根据输入条件,机构各驱动支链缓慢收缩,运动平台中心向z轴负方向移动,与输入条件相符。同时,运动平台中心向x轴正向缓慢移动。运动平台速度变化曲线如图4所示。

图4 运动平台速度变化曲线
运动平台速度和角速度变化不明显,基本为匀 速。运动平台加速度变化曲线如图5所示。

图5 运动平台角加速度变化曲线
4 结论
基于4-UPS/PPU并联机构的运动特征,建立了机构的运动学方程,得到了输入、输出位置、速度和加速度关系。利用SimMechanics工具箱建立了机构的仿真模型,并进行了仿真计算。利用M文件建立机构的输入方程,得到了机构运动平台的位置、速度和加速度随时间变化曲线。
[1]刘剑敏,马履中,许子红,等.振动筛两平移两转动并联机构的运动学分析[J].农业机械学报,2008,39(2):59-62.
[2]马履中,陈修祥,杨启志,等.基于并联机构的具有冗余自由度四自由度弹性阻尼减振装置研究[J].中国机械工程,2006,17(17):1761 -1764.
[3]王英波,黄其涛,郑书涛,等.Simulink和 SimMechanics环境下并联机器人动力学建模与分析[J].哈尔滨工程大学学报,2012,3(1):100 -105.
[4]彭学锋,鲁兴举,吕鸣.基于SimMechanics的两轮机器人建模与仿真[J].系统仿真学报,2010,22(11):2643-2645.
[5]于凌涛,张楠,张立勋.3-RPS并联机器人静力学研究及SimMechanics仿真[J].哈尔滨工程大学学报,2010,31(8):1061-1064.
[6]王国明,马履中.基于SimMechanics的二自由度并联机器人运动学仿真[J].机械设计与制造,2012(6):162-164.
[7]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
K inematic Analysis of 4-UPS/PPU Parallel Mechanism Based on SimMechanics
JIYe1,ZHAO Shuling2,SUN Juan1,WU Rui1,ZHANG Danwen1
(1.School of Mechanical Engineering,Luoyang Institute of Science and Technology,Luoyang Henan 471023,China;2.Zhumadian Senior Technical School,Zhumadian Henan 463000,China)
Based on configuration evolution,by means of adding a PPU driven-limp,a 4-UPS/PPU parallelmechanism(PM)was built.The DOFs ofmovement platform were limited by driven-limp and one-translational and one-rotational DOFs were constrained.4-UPS/PPU PM that the kinematic equations of inputs and outputs were built and Jacobian matrixes of velocity and acceleration were obtained by themethod of derivation possesses two rotational and two translational DOFs.The toolkitof SimMechanics being used for the simulation calculation,themotion law ofmovement platform was obtained.The results show thatoperation ofmovement platform is stable and simulation calculation is in accordance with the theoretical calculation.
4-DOFs;Parallelmechanism;Kinematics;SimMechanics
TP242.2
A
1001-3881(2015)21-083-3
10.3969/j.issn.1001 -3881.2015.21.019
2014-07-21
河南省高等学校重点科研项目 (15A460007);洛阳理工学院引进人才专项科研基金资助项目
季晔 (1982—),男,博士,讲师,研究方向为并联机器人机构学理论。E-mail:jiye_xzut@yeah.net。
book=43,ebook=400
猜你喜欢
河北省科学院学报(2020年1期)2020-05-25 06:57:18
制造技术与机床(2018年11期)2018-11-23 01:07:50
水利科技与经济(2016年7期)2016-04-25 13:03:12
海军航空大学学报(2015年1期)2015-11-11 17:18:37
实用手外科杂志(2015年2期)2015-08-28 09:50:56
饲料博览(2015年4期)2015-04-05 10:34:14
北京航空航天大学学报(2014年1期)2014-12-19 08:58:38
计算机与网络(2014年1期)2014-03-25 10:56:56
机械制造与自动化(2014年1期)2014-03-01 04:22:01
幼儿智力世界(2013年8期)2013-04-29 00:44:03
