
基于SolidWorks&SimMechanics对3-UPU并联机器人运动学仿真及控制
2015-04-26 08:23:10宋马军陈健伟张荣兴朱城伟
机床与液压 2015年21期
宋马军,陈健伟,张荣兴,朱城伟
(江西理工大学机电工程学院,江西赣州 341000)
0 前言
少自由度并联机构具有高刚度、高精度、高灵活性、高承载能力等优点,一定程度上改善了六自由度并联机构工作空间小、运动支链多、生产成本高等缺点[1-2]。其中,三自由度并联机构具备了少自由度并联机构的优点且控制相对容易,在各领域中具有广泛的应用价值和潜力。HUNT[3]于1983年提出的3-RPS并联机器人得到了广泛的应用,黄真等[4]对3-RPS并联机器人的位置、运动和受力进行了研究,LI等[5]对3-UPU并联机构的瞬时运动学性能进行了分析。SimMechanics是Matlab中的机构系统模块集,它可用各种运动副和刚体组合进行机构的建模和仿真,为多体动力机械系统及控制系统提供了正向动力学分析、逆向动力学分析、运动学分析、线性化分析等。利用SimMechanics工具进行机构建模仿真不需要建立数学模型和编程,即可实现实时分析和机构运动状态的模拟显示。但SimMechanics对复杂模型装配体的直接建模工作量大和出错率高,模型中坐标系的设定难度大和数据计算繁琐等缺点。基于模型转换接口技术提高了复杂模型的建模仿真的工作效率,降低了建模出错率,在建模仿真中基本不需要对数据的计算。
PID控制因算法比较简单、控制一般可建立精确数学模型的系统可靠性高、原理简单、鲁棒性好和能达到理想的控制效果等优点,已被广泛应用于各个领域的工业生产中[6]。但由于它是一种线性结构的控制,而对于非线性、不确定性系统,如对于并联机器人想要实现理想的控制效果较难。模糊控制是以模糊语言变量、模糊逻辑推理及模糊集合为基础,由论域映射到论域的非线性控制,属于智能控制算法的一种。它具有被控对象不需要有精确的数学模型、易于接受、鲁棒性和适应性好等优点[7]。
本文作者利用螺旋理论对3-UPU并联机构实现纯平动的构型进行了分析,该构型的特点是同支链两个虎克副中,两个内侧的转动轴心和两个外侧的转动轴心均相互平行。运用SolidWorks&SimMechanics模型转换接口技术对3-UPU并联机构的运动特性仿真,大大地提高了SimMechanics模块对于复杂实体仿真建模的准确性,避免大量数据的计算,提高了操作效率。基于Matlab语言对传统PID控制系统和模糊PID控制系统的性能及3-UPU并联机构的控制对比。
1 3-UPU型并联机构运动特性分析
如图1所示,3-UPU并联机构由两个相似的正三角形平台和三条相互独立的支链组成,每条支链由两个虎克副和一个移动副所组成。坐标系O-XYZ和坐标系o-xyz分别固结于定、动平台中心处。定、动平台外接圆半径分别为R=100 mm和r=50 mm。初始位置时,动平台中心相对于定坐标为zp=。
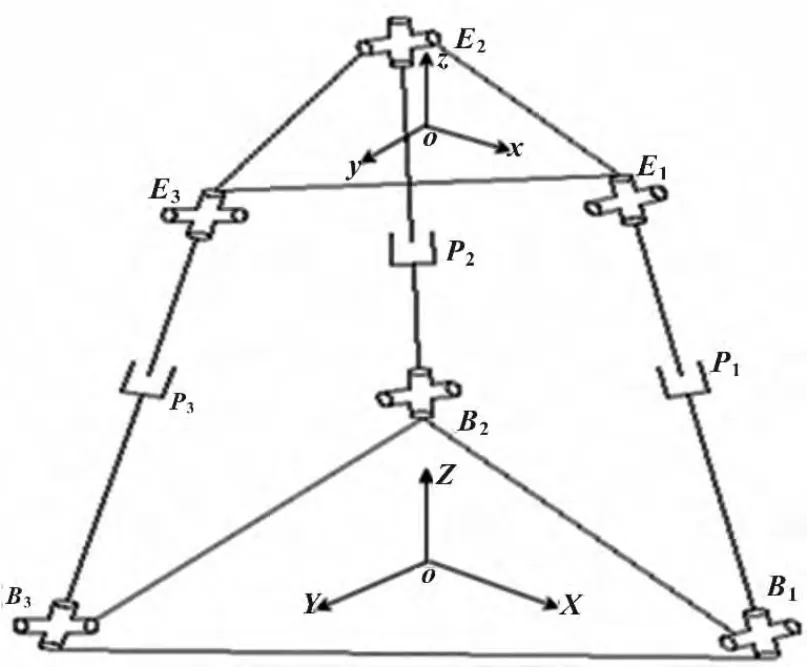
图1 3-UPU型并联机器人结构示意图
1.1 螺旋理论
螺旋理论形成于19世纪。1900年R.S.BALL完成经典著作《旋量理论》。20世纪前半叶,几乎无人问津旋量理论。1948年,F.M.DIMENTBERG在分析空间机构时,才再次应用了这个理论。此后,旋量理论才逐渐为机构学所重视,得以迅速地发展[8]。
如图2,螺旋理论中的一个旋量可同时表示空间一组对偶矢量。

图2 螺旋系几何示意图
旋量用对偶矢量表示:

式中:r×s=s0-hs为该旋量轴线位置,h为旋量节距,具有长度单位。当h=0,(s;s0)=(s;s0)为线矢量;当h=∞,(s;s0)=(0;s)为偶量。

式中:“。”表示螺旋的互易积。0节距的力螺旋描述的是力,无穷大节距的力螺旋则是力偶。逆螺旋定义的是机构的公共约束,借助Mathematic可求得逆螺旋。
1.2 3-UPU型并联机器人逆螺旋
因支链均为UPU,任取一条支链进行分析,如图3。以虎克副B1外侧轴心为X轴建直角坐标系OXYZ,支链与X轴的夹角为α。依据螺旋理论可得支链B1E1的运动螺旋为:


图3 UPU支链运动螺旋
支链是由末端受5个螺旋组合而成的螺旋系,并受到一个约束。由于运动螺旋的反螺旋是结构约束,表示物体在三维空间受到的约束,支链末端受到的约束和支链螺旋系的反螺旋是等价的。利用Mathematica计算可得反螺旋为:

分析可得,支链受到一个约束力偶,约束支链沿z轴的转动自由度。同理,另外两条支链也各受一个约束力偶,并依据线矢和旋量在不同几何空间下的最大线性无关数表[9]可确定该机构受X、Y、Z方向的力偶约束,只能三维平动。
2 3-UPU型并联机构建模
SimMechanics是Simulink中机构系统模块集,它可对各种运动副连接等刚体进行建模与仿真,实现对机构系统进行动态性能分析与设计目的。借助该工具进行机构分析不需要建立复杂的数学模型和程序的设计即可实现实时分析和机构运动状态的模拟显示,它大大地提高机构设计和研究人员的工作效率[10-11]。
基于SimMechanics的机构建模有两种方法,分别是直接方法和间接方法。直接方法是利用SimMechanics对机构建模,建模过程虽简单,但仿真前的各模块参数设置易于出错,尤其是涉及到一些刚体的惯性矩等参数设置,适用于简单的机构。间接方法是借助于实体建模工具及其与SimMechanics的接口技术实现机构的联合建模仿真,该方法适用于复杂模型。
本文作者利用SimMechanics&SolidWorks接口技术对3-UPU并联机构的建模与仿真过程可阐述如下:
(1)运用SolidWorks对并联机构实体建模,如图4,并另存为.XML文件;
(2)Matlab中执行mech_import命令,通过Import Physical Modeling XML窗口导入.XML文件,在SimMechanics中生成机构的可视化结构模型。如图5—7,对模型添加所需的驱动及检测模块,并另存为.SLX文件。接口技术的好处在于生成的模型中,各构件的参数均已自动设置;
(3)合理地设置初始参考输入值,如齐次变换矩阵、初始位置等,如图8所示;
(4)设置Configuration Parameters中的可视化选项并运行,可得如图9中可视化的仿真实体。

图4 3-UPU并联机构实体图

图5 XML文件转换器图
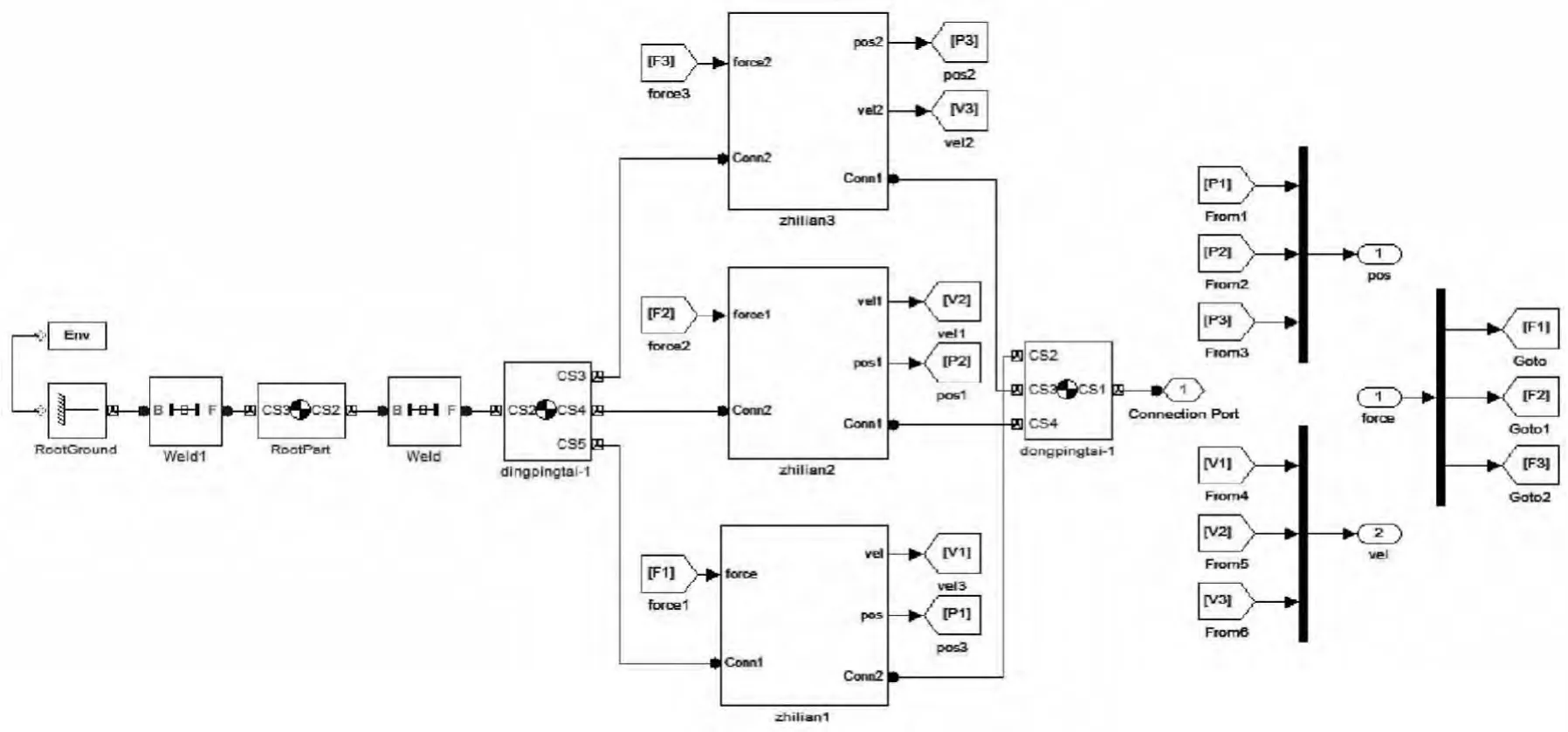
图6 3-UPU并联机构转化后机构整体图
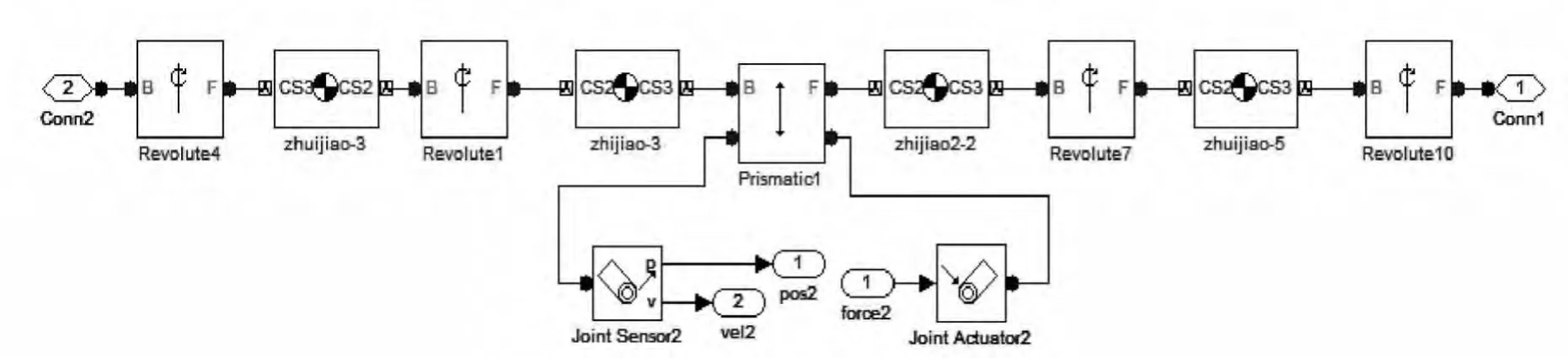
图7 3-UPU并联机构支链模型图

图8 理论模型
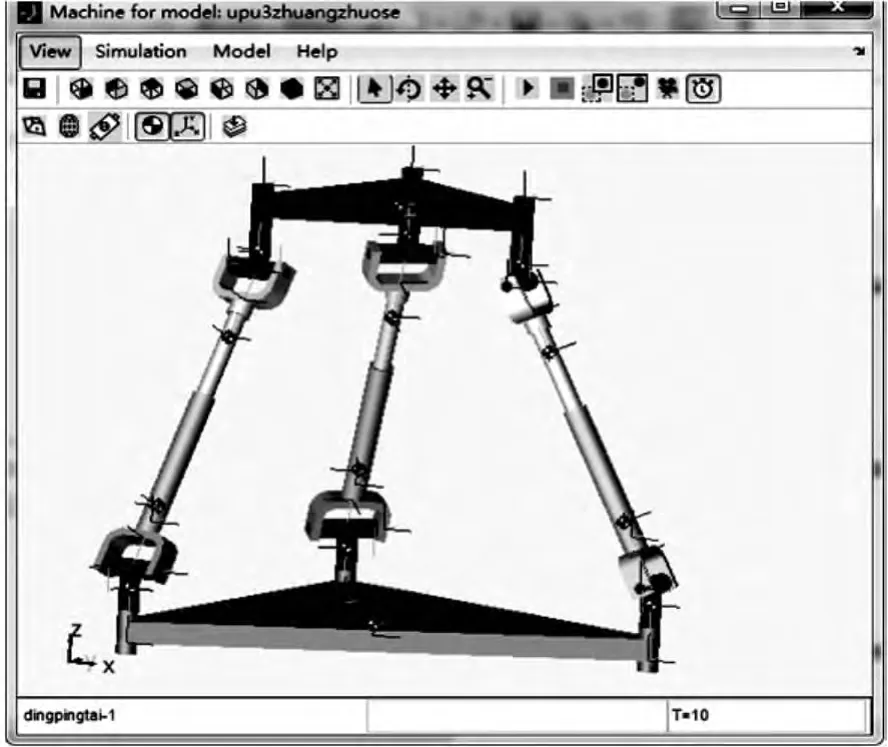
图9 3-UPU并联机构转换后的可视化结构图
3 控制系统设计
3.1 传统PID控制
传统PID控制具有结构简单、稳定性好、可靠性高等优点,如图10所示。
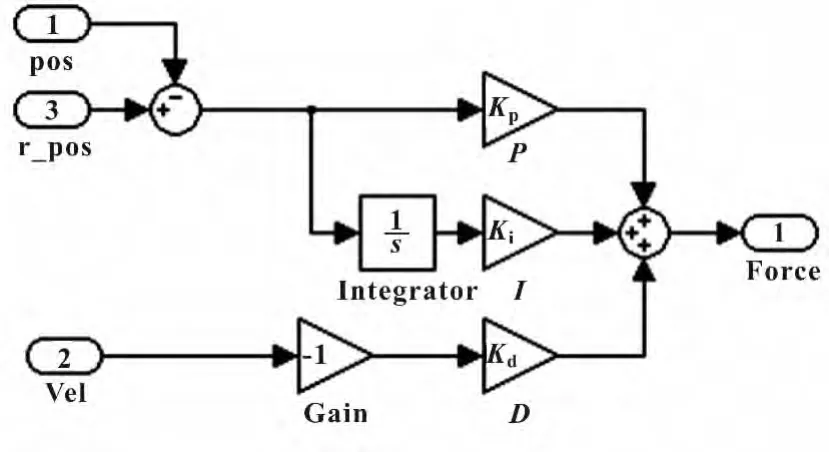
图10 传统PID控制图
PID控制原理,是在理想状态下由计算公式所得到的期望值与实际输出值的差构成控制偏差,作为控制器的输入量,再对其输入量进行比例运算、积分运算、微分运算,经过线性组合合并成控制量输出,再由控制量对被控对象进行控制。根据传统PID控制原理,对3-UPU并联机构仿真的传统PID控制系统可设计成如图7所示,参数Kp、KI、KD可由试验紧凑法整定。
3.2 模糊PID控制
由于PID控制中,参数调整的不确定性,大大增加了控制过程中的工作量,同时使其控制作用很难达到最佳效果。模糊PID控制原理(如图11)就是应用模糊理论,通过分析PID控制参数的作用效果,构造隶属度函数,建立模糊规则,运用模糊推理,使PID参数能够实现实时最佳参数调整。
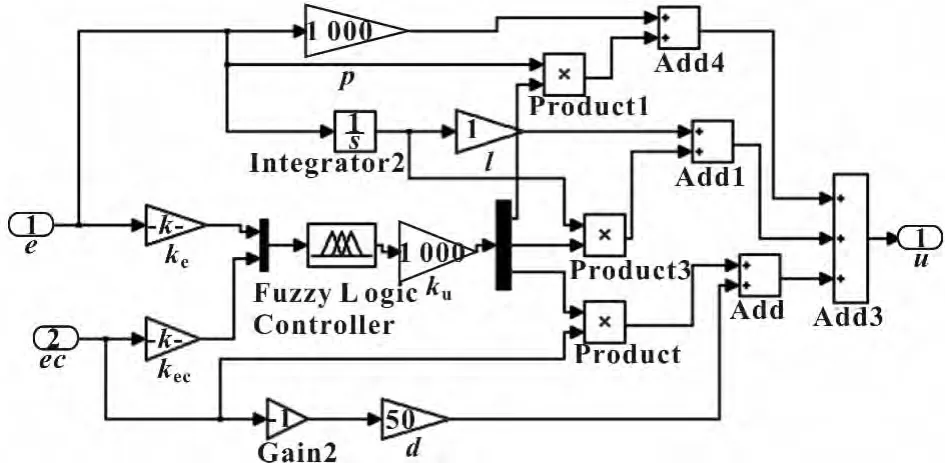
图11 模糊PID控制系统
模糊推理是依据输入输出量的模糊语言变量及其隶属函数,通过由模糊规则确定的对应关系进行运算,以确定任意值的输入量对应的输出量的值,并以此得到详细的控制查询表。模糊推理方法有很多种,包括Mamdani极大极小运算法、乘积模糊推理法和由日本学者Tsukamoto提出的适合单调隶属函数的模糊推理方法等。其中,Mamdani极大极小运算法应用广泛,能满足运算的复杂程度和得到信息的丰富程度的综合要求。
3.2.1 变量和模糊规则的确定
由于模糊PID控制器主要是针对PID的3个参考调整,使其能够实现参数自调整的效果。同时,对于该控制器的输入,选取控制器的偏差E和偏差变化EC作为输入量,kp、ki、kd为输出量。基本原理是把if-then规则定义为乘积空间中的二元模糊关系。对模糊控制的模糊子集可表示如下:

用模糊语言变量表示为(NB,NM,NS,ZO,PS,PM,PB)。
结合传统PID参数的整定,根据相关领域的专家对PID控制试验数据分析,可得对输入输出变量模糊区域的模糊规则表。表1中共49条模糊规则,由第一条语句所确定的控制规则为u1,同理可得控制量的模糊集合u为:

模糊集合的论域U可采用最大隶属度原则进行模糊模式的识别归类,该方法应用于个体的识别,设Ai∈F(U)(i=1,2,…,n),对u0∈U,若存在i0,使Ai0(u0)=max{ A1(u0),A2(u0),…,An(u0)},则认为u0相对地隶属于Ai。
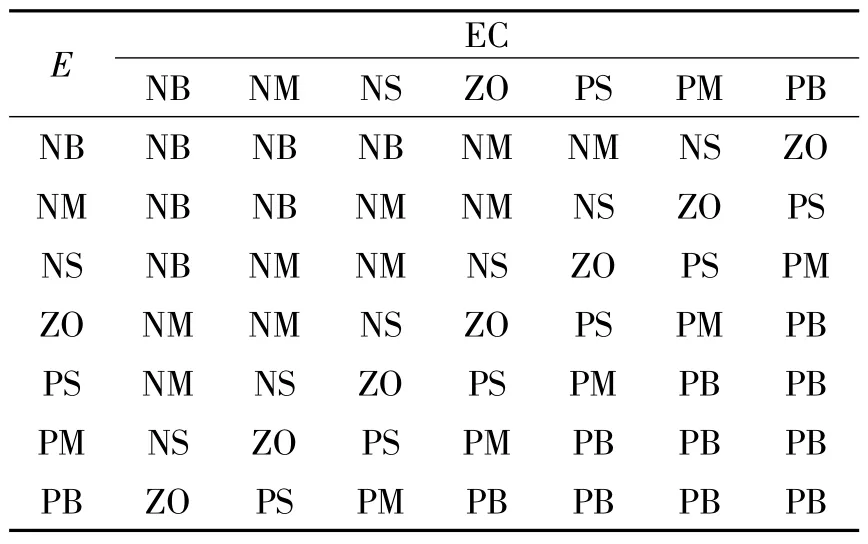
表1 模糊规则表
文中采用工业控制中广泛使用去模糊法—加权平均法,可得关于模糊规则的模糊相似矩阵R=(rij)n×m给出,具体值为rulelist=[1 1 7 1 5 1 1;1 2 7 1 3 1 1;1 3 6 2 1 1 1;1 4 6 2 1 1 1;1 5 5 3 1 1 1;1 6 4 4 2 1 1;1 7 4 4 5 1 1;2 1 7 1 5 1 1;2 2 7 1 3 1 1;2 3 6 2 1 1 1;2 4 5 3 2 1 1;2 5 5 3 2 1 1;2 6 4 4 3 1 1;2 7 3 4 4 1 1;3 1 6 1 4 1 1;3 2 6 2 3 1 1;3 3 6 3 2 1 1;3 4 5 3 2 1 1;3 5 4 4 3 1 1;3 6 3 5 3 1 1;3 7 3 5 4 1 1;4 1 6 2 4 1 1;4 2 6 2 3 1 1;4 3 5 3 3 1 1;4 4 4 4 3 1 1;4 5 3 5 3 1 1;4 6 2 6 3 1 1;4 7 2 6 4 1 1;5 1 5 2 4 1 1;5 2 5 3 4 1 1;5 3 4 4 4 1 1;5 4 3 5 4 1 1;5 5 3 5 4 1 1;5 6 2 6 4 1 1;5 7 2 7 4 1 1;6 1 5 4 7 1 1;6 2 4 4 5 1 1;6 3 3 5 5 1 1;6 4 2 5 5 1 1;6 5 2 6 5 1 1;6 6 2 7 5 1 1;6 7 1 7 7 1 1;7 1 4 4 7 1 1;7 2 4 4 6 1 1;7 3 2 5 6 1 1;7 4 2 6 6 1 1;7 5 2 6 5 1 1;7 6 1 75 1 1;7 7 1 7 7 1 1];
对程序执行命令showrule(‘a’)、ruleview(‘a’)和surfview(‘a’)便可得相应的模糊逻辑工具箱的GUI图如图12—14所示。


图12 模糊规则编辑器图
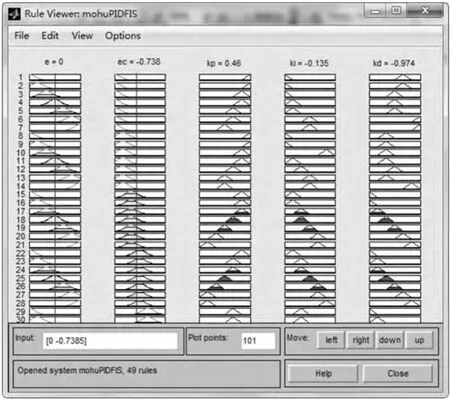
图13 模糊规则观察器图

图14 输出曲面观察器图
3.2.2模糊控制器设计
模糊控制器是直接实现模糊推理算法的专用工具。可用软件和硬件两种方式完成模糊控制器的功能。当计算量比较小时,可用软件实现,但对于一些计算量大、实时要求高的控制系统,需要用硬件设备直接实现模糊推理,以达到计算迅速、使用简便的目的[12]。模糊控制器的设计步骤包括模糊化、构建模糊推理规则、确定权与规则信度和反模糊化,如图10中的Fuzzy Logic Controller,设计程序见3.2.1节。
4 仿真
根据文中所建立的3-UPU型并联机构及控制系统模型,采用Matlab语言对传统PID控制和模糊PID控制进行程序设计并进行控制性能比较,如图15。PID参数调整值为kp=1.3、ki=4.3、kd=0.57,输入三平动信号为15sin( 5πt)的正弦信号。3-UPU型并联机器人动平台位置跟踪图与输入信号相近,如图16。

图15 传统PID与模糊PID控制响应对比图

图16 3-UPU型并联机器人模糊PID控制动平台位置跟踪
5 结束语
文中对提出的3-UPU并联机构运动特性仿真和控制系统进行了分析。首先,利用模型转换接口技术建模仿真;其次,对传统和模糊PID控制方法建立模型及系统性能分析。结果对比可得:由于并联机构具有明显的非线性,传统PID控制很难实现预期的控制目标。模糊PID控制较传统PID控制具有控制精度高、响应更快、性能明显改善等优点。文中还通过XML文件中附带的STL文件提供了每个刚体的可视化实体动画模型。同时,3-UPU并联机构仿真结果也验证了1.2节所得的3个转动均被约束力偶约束,仅实现纯平动。该方法提高了复杂且不易在SimMechanics中直接建模的模型的建模效率和准确率。
[1]BAJPAI A,ROTH B.Workspace and Mobility of a Closeloop Manipulator.[J].The International Journal of Robotics Research,1986,5(2):131-142.
[2]GOSSELIN CM,ANGELESJ.The Optimum Kinematic Design of a Spherical Three-degree-of-freedom Parallel Manipulator[J].Mech.Transm.Autom.Des.1989,111(2):202-207.
[3]HUNT K H.Structural Kinematics of In-parallel-actuated Robot Arms[J].ASME Journal of Mechanisms,Transmission and Automation in Design,1983,105(4):705-712.
[4]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[5]LI Jianfeng,WANGJinsong.Inverse Kinematic and Dynamic Analysis of a 3-OF Parallel Mechanism[J].Chinese Journal of Mechanical Engineering,2003,16(1):54-58.
[6]朱大昌,李培,顾起华,等.全柔顺并联机构理论[M].北京:冶金工业出版社,2013.09.
[7]朱大昌.基于并联支撑机构的车载雷达天线自动调平系统研究[D].北京:北京交通大学,2008.
[8]黄真,赵永生,赵铁石.高等空间机构学[M].北京:高等教育出版社,2006.
[9]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[10]杨树川,邵金龙,杨术明等.基于SolidWorks&SimMechanics的机构运动分析与仿真[J].河北工业科技,2011(4):221-225.
[11]张立勋.机电系统建模与仿真[M].哈尔滨:哈尔滨工业大学出版社,2009.
[12]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社;2008.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
高师理科学刊(2020年1期)2020-11-26 05:59:00
佛山科学技术学院学报(自然科学版)(2020年1期)2020-03-12 01:36:52
组合机床与自动化加工技术(2017年5期)2017-05-25 00:37:45
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
实用手外科杂志(2015年2期)2015-08-28 09:50:56
饲料博览(2015年4期)2015-04-05 10:34:14
北京航空航天大学学报(2014年1期)2014-12-19 08:58:38
