
带式输送机物料瞬时流量激光测量方法
2015-03-08 07:29初秀民代超磊乐章丝
湖南大学学报(自然科学版) 2015年2期
曾 飞,吴 青,初秀民,代超磊,乐章丝
(1. 武汉理工大学 港口装卸技术交通行业重点实验室,湖北 武汉 430063;2. 南通大学 交通学院,江苏 南通 226019;3.武汉理工大学 水路公路交通安全控制与装备教育部工程研究中心,湖北 武汉 430063)
带式输送机物料瞬时流量激光测量方法
曾 飞1,2†,吴 青1†,初秀民3,代超磊1,乐章丝1
(1. 武汉理工大学 港口装卸技术交通行业重点实验室,湖北 武汉 430063;2. 南通大学 交通学院,江苏 南通 226019;3.武汉理工大学 水路公路交通安全控制与装备教育部工程研究中心,湖北 武汉 430063)
针对高带速、大运量带式输送机物料瞬时流量难以实时精准测量问题,提出一种基于激光扫描的带式输送机物料瞬时流量高精度实时测量方法.利用二维激光测距仪和测速传感器获取带式输送机高速运行下物料流三维激光点云数据,经滤波、异常值剔除、数据平滑等预处理后,通过分析扫描线上激光点云空间形态特征提出一种物料流轮廓自动提取方法,并建立基于面元积分的带式输送机物料瞬时流量计算数学模型.开发的带式输送机物料瞬时流量测量系统用于测量带宽为200mm槽型带式输送机在带速0.5~1.5m/s下物料流瞬时流量时,数据重复性和相关性都达到98%以上.实验结果表明,该方法采样间距小、测量精度高、实时性强,具有较强适用性和可靠性,有助于为港口带式输送机自适应节能控制技术提供实时、精确的数据来源.
测量;物料瞬时流量;激光扫描;带式输送机;节能
2011年,我国港口拥有生产用码头泊位超3.1万,完成货物吞吐量突破100亿t(连续9年位居世界第一),其中干散货吞吐量占总吞吐量比率高达58.3%[1].随着干散货运输以年超10%比率迅猛增长,港口散货码头原粗放型长距离带式输送设备高耗能、低效率问题日益严重.特别当输送带上物料较少或断续情况时带式输送机仍以高速恒定状态运行从而能耗浪费严重.因此,交通部特别在《“十二五”水运节能减排总体推进实施方案》([2011]474号文件)中将带式输送机节能运行控制技术列为重要研发任务之一.
近年来,因变频技术调速平稳、瞬态稳定性高、节能等比较优势,国内外研究学者纷纷提出了基于输送带实时负荷的带式输送机变频调速控制方法[2-4].为使其运行在最佳负荷状态,物料瞬时流量成为调节带式输送机运行速度的重要指标.目前散货码头物料瞬时流量检测大多采用电子皮带秤、核子秤等接触式方式测量,其测量方式通常假定单位计量段内物料流分布均匀,因此计量精度易受真实物料分布不均、断续等因素影响.同时,带式输送机系统结构复杂,带速调节不当会直接影响系统各机械部件使用寿命和运行安全[5].随着带式输送机向高带速、大运量方向发展,实时、准确的物料流瞬时流量检测方法对于保障带式输送机系统生产安全同时切实提高系统生产效率具有重要意义.
光学测量技术以其柔性大、结构简单、低成本和高精度等优点,逐渐被用于输煤量或煤堆体积等非接触式测量,包括视觉检测和激光测量两种.文献[6]采用小波、神经网络算法实现了带式输送机煤流视频图像边界快速识别和输煤量有效估计.文献[7]设计了双目视觉系统对大型散料(静态)物料体积和重量进行测量.针对堆场形貌复杂、纹理特征贫乏等特性,文献[8]提出了激光投射仪扫描辅助下的双目摄影测量方法对堆场进行扫描与局部三维形貌重建.为实现散状物料流量远程在线检测功能,文献[9]设计了基于FPGA(Field Programmable Gate Array)和3G(Third Generation Mobile System)的带式输送机物料流视觉检测系统.上述基于视觉检测方法虽具有可行性,但处理速度因受纹理特征提取、摄像机标定等复杂算法限制而无法满足带式输送机物料流量实时采集要求.
激光三维测量技术是一种高效率、高精度、实时测得堆体体积有效监测方法[10-11].考虑到激光测量受散料纹理特征因素影响较小优势,根据带式输送机物料流瞬时流量测量实时、连续、精准需求,本文利用二维激光测距仪和测速传感器获取带式输送机高速运行下高密度物料流三维激光点云数据,提出一种基于扫描线激光点云空间形态特征的物料流轮廓自动提取方法,设计了两种物料流截面积计算方法,并建立了一种基于面元积分的物料瞬时流量实时测量数学模型.最后通过设计、开发的带式输送机物料瞬时流量激光测量系统对本文测量方法进行实验测试.
1 物料瞬时流量激光测量原理
1.1 激光测量原理
设计的物料瞬时流量激光测量系统原理图如图1所示.系统采用1台二维激光测距仪采集带式输送机水平高速运行下物料流表面三维激光点云数据,融合速度传感器转换的位移信息后经物料瞬时流量计算算法实现物料瞬时流量精准、高效计量.为方便获取被测物料流表面散乱激光点云,激光测距仪选择在带式输送机水平段高h处安装,并使其垂直向下对准物料,让物料流通过方向与激光扫描截面保持垂直.因二维激光测距仪是基于飞行时间差原理,将测量的内部旋转镜入射光束角度变化范围内发射与反射光间飞行时间差Δtik,精确转换为激光扇面与被测目标轮廓间二维距离值(lik=c·Δtik/2,c为光速).因此,通过激光测距仪获取的物料流截面每帧扫描数据包括2个参数:轮廓上任意点Mik相对于扫描中心水平线偏角θik;Mik与扫描中心间直线距离lik.为方便后续物料流瞬时流量计算,需要对激光每帧扫描散料截面轮廓各特征点数据进行二维坐标转换,坐标计算示意图如图2所示.

图1 物料截面轮廓激光测量原理图

图2 物料流扫描截面各特征点坐标计算示意图
图2中,θ为扫描起始点与水平线间夹角,由激光扫描角度范围(180°-2θ)确定;Δβir为激光扫描仪角分辨率;每帧扫描特征点数m由(180°-2θ)/Δβir确定;k为当前扫描获取物料流截面帧数.由于输送带速度瞬时值v(tk)瞬时内不会发生突变(输送带粘弹特性和阻力作用),因此假设带式输送机在激光扫描物料截面每2帧间(Δt=1/(fspeed-1))时间内为匀速运行,其输送带行进距离Δx等于带速值v(t)与激光测距仪测量频率fspeed-1后倒数的乘积.因此,由图2可推出物料流截面特征点的三维坐标计算公式为:
i=1,2,…,m;k=1,2,…,∞
(1)
式中m为每帧扫描特征点数;tk为第k帧时刻;yik为第k帧扫描截面在YOZ平面中y轴方向上第i个特征点的y坐标值;zik为第k帧扫描截面在YOZ平面中z轴方向上第i个特征点的z坐标值;ZO为扫描中心离y轴垂直距离;θik为第k帧扫描截面在yoz平面中扫描激光线与水平线夹角.
再通过空间几何转换被测目标点三维空间几何坐标值{{(x1,y10,z10), (x1,y11,z11),…, (x1,y1m,z1m)}, {(x2,y20,z20), (x2,y21,z21,…, (x2,y2m,z2m)},…, {(xk,yk0,zk0), (xk,yk1,zk1),…, (xk,ykm,zkm) }.
1.2 基于面元积分的物料瞬时流量计算数学模型
散货码头带式输送机输送量通常由物料瞬时流量和累计流量表征.其中物料流瞬时流量通常定义为物料瞬时载荷与输送带瞬时速度的乘积[12],而物料瞬时载荷实质是单位时间T内通过某流通截面的质量,即物料密度乘以单位时间内物料流通截面的体积.因此,为准确计算物料瞬时流量,建立精确的单位时间内物料流通截面体积计算模型是关键.目前,针对不规则料场或煤堆体积测量通常采用TIN (triangulated irregular network)三角网建模思想,将激光离散点数据三角化后形成互不相交、互相邻近若干三棱柱,通过累加直三棱柱体积值后得出料场堆料的体积.因该方法计算步骤繁琐、计算工作量巨大,再加上近年来研制的激光测距仪扫描精度和频率飞跃提升,本文采用图3所示基于面元积分的数学模型计算物料瞬时流量.

图3 物料流瞬时流量数学模型
图3中,黑色标注为激光测距仪扫描物料流每帧截面位置.假设带式输送机输送带以带速v(t)水平向右运输散料,则S(1),…,S(l),…,S(m),…,S(k),…,S(n)分别为第1,…,l,…,m,…,k,…,n帧激光扫描物料流截面面积.考虑物料流不均匀性和输送带速度瞬时性因素,设t时刻,输送带上单位时间载荷值为q(t),物料堆积密度为ρ,物料流瞬时截面积为S(t),则瞬时流量P(t)为:
(2)
式中ρ为物料堆积密度;v(t) 为输送带速度,由测速传感器测出.推导得,
P(t)=ρv(t1)S(1)1/(fspeed-1)+
ρv(t2)S(2)1/(fspeed-1)+…+
ρv(tk)S(k)1/(fspeed-1)=
(3)
式中k为单位时间内物料流截面面积个数,由k=T×fspeed计算得出.
2 物料瞬时流量测量算法
2.1 物料流轮廓边界自动提取
受散料扬尘、输送带垂直波动、尖角矿石镜面反射、遮挡等因素影响,物料流激光测量数据存在一定的系统误差和随机误差.因此,为精确提取物料流轮廓和后续瞬时流量快速、精确计算,需要对物料流点云进行预处理.物料流激光扫描轮廓截面数据分布特征:①物料流轮廓激光点云位于扫描线中间区域,对称分散于带宽中点左右,且中间区域物料扫描点Z坐标值较大,并依次向Y轴左右两边呈缓慢减小趋势(相邻两扫描点Z坐标间差值较小);②当物料轮廓与输送带轮廓相交的边界处存在局部阶跃;③输送带轮廓扫描点Z坐标变化相对平缓,但同物料相比变化趋势相反;④采集支架、输送机旁边支撑装置等物在局部范围内Z坐标变化很大.因此,首先根据拉依达准则,以2倍标准差剔除滤波后数据可能存在的异常值(如物料反光引起的异常值).再采用移动窗口法对每帧扫描曲线从中间往两端逐点分析连续相邻窗口Z坐标差值,找到物料两边与输送带边界区域进行非物料点剔除.滤波算子由3个窗口组成,窗口1用来快速确定左右两边物料与输送带边界区域,而窗口2和3用来进一步约束窗口1所确定的物料轮廓范围.通过设置Z坐标差值阈值Δzborder,Δzmaterial,Δzbelt和窗口大小l将窗口从中间往两边移动,自动提取物料流轮廓边界.假设每个窗口包含l个激光点:Mik~M(i+l)k,即坐标范围为(xk,yik,zik),…,(xk,y(i+l)k,z(i+l)k).每个窗口Z坐标差值为Δz=max(zik,z(i+1)k,…,z(i+l)k)-min(zik,z(i+1)k, …,z(i+l)k).Δz1,Δz2,Δz3分别为窗口1,2,3内Z坐标差值,则有
Δz1≤Δzborder
(4)
Δz2≤Δzmaterial
(5)
Δz3≤Δzbelt
(6)
式中Δzborder,Δzmaterial,Δzbelt取值与所输送物料性质有关,窗口大小l具体取值与激光扫描点密度相关.算法如图4所示.
图4 基于移动窗口的物料流轮廓搜索方法
2.2 物料流截面积计算
提取物料流轮廓后,可根据扫描点坐标近似计算物料流截面积.
1)三角面积累积方法
三角面积累积方法如图5所示.
图5 三角面积累积方法
提取物料流轮廓边界后,因激光扫描角分辨率为Δβir<1.,可将每相邻两点间连线近似看作线性变化,因此相邻两点与激光扫描中心可围成三角形.假设物料流轮廓起始点为Mak(yak,zak),终止点为Mnk(ynk,znk),根据该两点对应角度θak=θ+aΔβir和θnk=θ+nΔβir提取空载时该角度范围内输送带轮廓激光点云数据后,得物料流截面积计算公式
S(k)=S(kk)-S(ky)=
(7)

2)梯形面积累积方法
梯形面积累积方法如图6所示.

图6 梯形面积累积方法

S(k)=S(Ik) +S(IIk) +S(IIIk)
(8)

(9)
(10)
(11)
3 实验结果与分析
3.1 带式输送机物料瞬时流量激光测量系统
系统由1台激光测距仪、MOXA Nport 6250模块、24V直流稳压电源、物料流激光数据采集与处理系统等组成.其中,激光测距仪选用德国SICK公司生产的LMS291-S05激光测距仪,激光波长λ= 905 nm,采集频率75帧/s.速度传感器选用德国SEW光电编码器ES1T(OG72DN1024TTL),供电电压5 V,信号5 V TTL/RS-422.根据物料瞬时流量采集需要,采用激光测距仪配套设置软件LMSIBS Configuration Software设置激光测距仪角度分辨率为0.25.(53.33样ms)、角度范围100.、mm级测量模式、测量分辨率10 mm、测量精度±35mm、最大测量距离为18m.通过台湾摩莎MOXANport6250模块以Ethernet通讯方式将测距仪每帧扫描的404组(l,θ)数据上传至上位机,由自行开发的基于VC++ 6.0的物料流激光数据采集与处理软件实现实测数据预处理、物料流轮廓提取和瞬时流量计算.因激光测距仪和目标对象间测量距离越小时获取每帧测量点数越多(激光点云获取精度越高),设计了测量距离和扫描截面方向左右位置二维可调的机械支架用于调节激光测距仪安装高度并确保被测物料宽度不超出扫描范围,系统硬件平台如图7所示.

图7 带式输送机物料瞬时流量激光测量系统
3.2 实验结果与分析
为检验本文测量方法精确性和有效性,将开发的带式输送机物料瞬时流量激光测量系统架设于港口装卸技术交通行业重点实验室散货码头物流装备与物流自动化实验平台1#堆场带式输送机水平段(带宽b=200 mm,运量Q=1.5 t/h,安川A1000变频器驱动,带速范围0.2~4 m/s),调节激光采集支架高度h=583 mm (激光扫描仪上平面离地面间距离)、水平宽度l=820 mm后,通过物料流激光数据采集与处理软件实测带式输送机通过物料的瞬时流量值.实验被测物料为细干河沙,为排除物料密度对测量精度的影响,通过标准容器升测量方式检验激光扫描测量物料瞬时体积流量精度.分别采集带速在0.5 m/s,1 m/s,1.5 m/s下装满1 L,2 L,3 L,5 L,7 L 5种不同规格标准容积升时物料体积流量激光测量值.表1为重复测量同标准物料体积10次后去除最大、最小值测量结果.
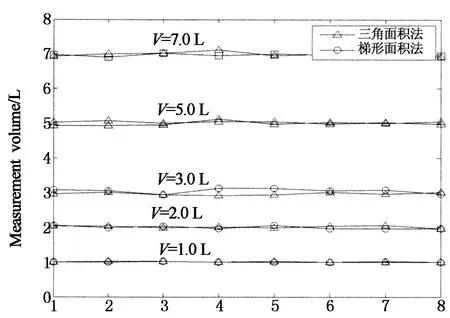
由表1计算出的测量数据重复性结果如表2所示.从表2可以看出,测试结果重复性和相关性在98%以上,测量数据速度变异系数都在98%以上(测量结果与带速无关).图8是根据表1激光测量数据与标准容积测量值间误差分析图,其中“△”代表三角面积累积方法测量结果,“□”代表梯形面积累积方法测量结果.

表1 基于激光扫描带式输送机物料瞬时体积流量实测值
表2 实测值重复性
图8中看出,激光测量值与人工测量值平均误差保持在3%以内,且三角面积累积方法更接近真值.系统测量误差主要来源于:1)带速测量误差:由于带式输送机水平运输过程中输送带垂直、水平振动较大,同时可能出现输送带与传动滚筒间打滑,使得部分输送带部分行走距离未被速度传感器检测,使得测量长度偏短、测量结果偏低.2)模型误差:由于物料流表面形状是不规则的,采用面元积分的物料流瞬时流量计算模型假设2帧时间内物料流面积与前帧面积相同,因此引入误差.3)实验测量误差:测量方法不完善、测量者对仪器使用不当、环境条件的变化等引入误差.因此,今后将研究更为合理的物料瞬时流量计算模型,通过设计合理实验验证方式,切实、有效提高带式输送机物料瞬时流量激光扫描测量精度、降低误差.
Count time

Count time

Count time
4 结 论
1)提出了一种基于激光扫描的带式输送机物料瞬时流量测量方法.采用单台激光测距仪设计了一种可三维激光点数据采集的光学系统,实现了高带速带式输送机物料瞬时流量测量.
2)设计了一种面元积分的物料瞬时流量计算模型.结合设计的光学系统采集带式输送机物料流三维激光点云,采用该算法对单位时间内物料瞬时流量进行计算,获取物料流瞬时流量大小.
3)实验结果表明,设计的基于激光扫描的带式输送机物料瞬时流量测量系统在测量带宽为200 mm槽型带式输送机在带速0.5~1.5 m/s下物料流瞬时流量时,数据重复性和相关性都达到98%以上.该方法采样间距小、测量精度高、实时性强,具有较强适用性和可靠性,有助于为港口高带速带式输送机自适应节能控制技术提供实时、精确的数据来源.
[1] 中华人民共和国交通运输部.2011中国航运发展报告[M].北京:人民交通出版社,2012:24-29.
Ministry of Transport, PRC. Report of China shipping development in Year 2011[M]. Beijing:China Communication Press, 2012:24-29.(In Chinese)
[2] 曾飞,吴青,初秀民,等.散货码头带式输送机调速节能研究进展[J].制造业自动化,2013,35(9):1-4.
ZENG Fei, WU Qing, CHU Xiu-ming,etal. Overview on belt conveyor energy-saving technology in bulk terminal based on speed controlling[J]. Manufacturing Automation, 2013, 35(9):1-4.(In Chinese)
[3] ZHANG Shi-rong, XIA Xiao-hua. Modeling and energy efficiency optimization of belt conveyors[J]. Applied Energy, 2011,88:3061-3071.
[4] LEPOSAVA B, RISTI′C, BORISLAV I,etal. Implementation of fuzzy control to improve energy efficiency of variable speed bulk material transportation[J]. IEEE Transactions on Industrial Electronics, 2012, 59(7):2959-2969.
[5] 宋伟刚.带式输送机的速度适应控制若干问题的分析[J].煤炭工程,2009,364(3):101-103.
SONG Wei-gang. Analysis on several issues of speed suitable control for belt conveyor[J]. Coal Engineering, 2009,364(3):101-103. (In Chinese)
[6] 孟凡芹,王耀才.煤矿井下带式输送机煤流图像识别方法的研究[J].煤炭学报,2003,28(1):91-95.
MENG Fan-qin, WANG Yao-cai. Study of the methods for recognizing the coal flow image of coal mine’s conveyer belt[J]. Journal of China Coal Society, 2003,28(1):91-95. (In Chinese)
[7] 袁娜,宋伟刚,姜涛.散状物料输送机称重的图像处理方法初步研究[J].煤矿机械,2007,28(12):59-60.
YUAN Na, SONG Wei-gang, JIANG Tao. Pilot study of imaging- processing method for weighing bulk material on belt conveyor[J]. Coal Mine Machinery, 2007, 28(12): 59-60. (In Chinese)
[8] 张小虎,欧建良,苑云,等.投影轮廓线辅助下的堆场三维形貌摄影测量研究[J].光学学报,2011,31(6): 0612002-1-0612002-8.
ZHANG Xiao-hu, OU Jian-liang, YUAN Yun,etal.Stack-yard 3d measurement based on photogrammetry and projected contour aiding[J]. Acta Optica Sinica, 2011, 31(6):0612002-1-0612002-8.(In Chinese)
[9] 曾飞,吴青,初秀民,等.基于FPGA的带式输送机物料流视觉检测系统[J].物流技术,2013,32(7):411-415.
ZENG Fei, WU Qing, CHU Xiu-ming,etal. Belt conveyor material flow visual inspection system based on FPGA[J]. Logistics Technology, 2013, 32(7):411-415.(In Chinese)
[10]李清泉,李必军,陈静.激光雷达测量技术及其应用研究[J].武汉测绘科技大学学报,2000,25(5):387-392.
LI Qing-quan, LI Bi-jun, CHEN Jing. Research on laser range scanning and its application[J]. Journal of Wuhan Technical University of Surveying and Mapping, 2000, 25(5):387-392.(In Chinese)
[11]张文军,舒新前,姜洪才,等.基于激光三维扫描的不规则煤场测量系统设计[J].煤炭科学技术,2009,37(5):111-114.
ZHANG Wen-jun, SHU Xin-qian, JIANG Hong-cai,etal. Design on survey system of irregular coal storage yard based on laser 3d scanning[J]. Coal Science and Technology, 2009, 37(5):111-114. (In Chinese)
[12]ZENG Fei, WU Qing, DAI Chao-lei. Speed controlling simulation system of bulk terminal’s belt conveyors[C]// IEEE Second International Conference on Transportation Information and Safety.Wuhan, China:Wuhan University of Technology, 2013:2062-2069.
Measurement of Material Instantaneous Flow on Belt Conveyors Based on Laser Scanning
ZENG Fei1,2†, WU Qing1, CHU Xiu-ming3, DAI Chao-lei1, YUE Zhang-si1
(1. Key Laboratory for Port Cargo Handling Technology Ministry of Communications, Wuhan Univ of Technology, Wuhan,Hubei 430063,China; 2. School of Transportation, Nantong Univ, Nantong,Jiangsu 226019,China; 3. Engineering Research Center of Transportation Safety (Ministry of Education), Wuhan Univ of Technology ,Wuhan,Hubei 430063,China)
As the instantaneous flow of bulk materials is hard to be accurately measured at a high speed on a large capacity belt conveyor in real-time, a more positive and accurate method to measure the material instantaneous flow on belt conveyor based on laser scanning technology was proposed. When the 3D laser point cloud data of bulk materials' surface profile are acquired at high speed by using 2D laser rangefinder and conveyor speed sensor, preprocessing steps of filtering, outliers excluding and data smoothing are applied. Then an automatic contour extraction method was proposed by analyzing the space morphological characteristics of material flow outline's laser point. By integrating the element area of material cross section, a mathematical model to calculate the instantaneous flow of bulk materials on belt conveyors was established. When measuring a trough belt conveyor whose belt speed is at 0.5 m/s to 2 m/s and bandwidth is 200 mm by using our laser scanning measurement system, the data repeatability and correlation can reach above 98%. Experiment results show that this method has strong applicability and reliability due to its small sample spacing, high measuring accuracy and real-time performance. The acquirement of real-time and accurate data can offer convenience for the further research of energy-saving control technology of belt conveyor in bulk terminal.
measurement; material flow; laser scanning; belt conveyor; energy saving
1674-2974(2015)02-0040-08
2014-07-11
2013年度交通运输部应用基础(重点平台)资助项目(2013329811340);江苏省高校自然科学研究面上项目(14KJB580008);南通市科技计划应用项目(BK2014017)
曾 飞(1982-),女,湖北武汉人,南通大学讲师,武汉理工大学博士研究生†通讯联系人,E-mail:zengfei2008@ntu.edu.cn
TP23;TP249;TH715
A
猜你喜欢
设备管理与维修(2021年21期)2021-12-29
冶金设备(2019年6期)2019-12-25
制造技术与机床(2019年11期)2019-12-04
科学家(2017年16期)2017-09-20
价值工程(2017年8期)2017-03-25
卷宗(2017年1期)2017-03-17
科技视界(2016年16期)2016-06-29
橡胶工业(2015年10期)2015-08-01
橡胶工业(2015年6期)2015-07-29
橡胶工业(2015年6期)2015-07-29
