
低附着路面电动助力转向控制策略
2015-03-08 07:29周兵,徐蒙,范璐
湖南大学学报(自然科学版) 2015年2期
周 兵,徐 蒙,范 璐
(1. 吉林大学 汽车仿真与控制国家重点实验室,吉林 长春 130025;2.湖南大学 汽车车身先进制造国家重点实验室,湖南 长沙 410082)
低附着路面电动助力转向控制策略
周 兵1,2†,徐 蒙2,范 璐2
(1. 吉林大学 汽车仿真与控制国家重点实验室,吉林 长春 130025;2.湖南大学 汽车车身先进制造国家重点实验室,湖南 长沙 410082)
车辆在低附着路面转向时转向阻力矩大幅降低,导致转向盘转矩随之减小,严重影响驾驶员的路感,易导致事故的发生.鉴于此,提出电动助力转向电流补偿控制策略以提高低附着路面驾驶员路感.利用扩展卡尔曼滤波方法估计出低附着路面前轴侧向力,进而计算出补偿电流值.在MATLAB/Simulink中建立系统仿真模型,利用实车试验数据与仿真数据对比,验证了仿真模型的准确性.不同行驶工况的仿真结果显示采用本文提出的控制策略后,转向盘力矩显著提高,使驾驶员在低附着路面下的路感与正常高附着路面相同,可以有效防止驾驶员的误操作,提高车辆行驶安全性.
车辆工程;电动助力转向;扩展卡尔曼滤波;控制策略
电动助力转向(Electric Power Steering,简称EPS)具有节能环保、结构紧凑、助力特性好等优点,是助力转向的发展方向.近年来,国内外学者对EPS做了大量的研究.Badawy等人建立了EPS的数学模型[1];林逸等人提出了EPS性能的评价标准[2];赵万忠等人对EPS的系统参数进行了优化[3].EPS研究的重点和难点在于对助力电机的控制.He等人对EPS做了较全面的分析,包括助力控制、回正控制、阻尼控制和补偿控制[4].在控制策略方面,各学者的研究涉及PID控制、最优控制、滑模控制、鲁棒控制、智能控制等[5-9].
以上各种对EPS的控制大多基于正常路面行驶工况,而对雨雪天气中经常出现的低附着路面行驶工况讨论甚少.高附着路面行驶时,轮胎线性区域很宽,轮胎很少工作在非线性区域.而低附着路面则相反,轮胎线性区域变的很窄,使得转向时很容易进入非线性区.因此,在低附着路面转向时,转向阻力矩较正常路面时低,导致反馈到方向盘的路感降低,若此时驾驶员来不及反应,依然按照正常路面时转向,会使转向角过大,容易导致车辆侧滑甚至侧翻等事故的发生.鉴于此,文献[10-11]研究了低附着路面EPS的助力和回正控制.
本文利用扩展卡尔曼滤波器估计低附着路面前轴侧向力,并把该估计值用于控制器的设计.利用理想前轴侧向力与估计前轴侧向力的差值计算EPS补偿电流,通过电流补偿控制提高低附着路面驾驶员路感.在MATLAB /Simulink中的仿真分析验证了本文提出的控制算法的有效性.
1 系统模型
1.1 EPS模型
EPS的总体结构如图1所示.为建立数学模型的需要,可以将转向系统做一些必要的简化处理[1].由刚体定轴转动定律, 可以得到转向系统动力学方程为:
(1)
(2)
Ts=Ks(θd-θp)
(3)
(4)
(5)
θp=Gsδf
(6)
式中Js为转向盘和输入轴转动惯量;Je为等效输出轴转动惯量;Jp为输出轴和减速机构转动惯量;Bs为转向盘和输入轴阻尼系数;Be为等效输出轴阻尼系数;Bp为输出轴和减速机构阻尼系数;Br为齿条阻尼系数;θd为转向盘转角;θp为输出轴转角;δf为前轮转角;Td为转向盘操纵转矩;Ts为扭矩传感器测得的转矩信号;Ta为电机助力矩;Tr为转向阻力矩;Ks为扭力杆刚度;rp为小齿轮半径;mr为转向齿条和车轮的质量;Gs为转向器传动比.助力电机采用直流电机,其模型为:
(7)
Ta=GmKzI
(8)
θm=Gmθp
(9)
式中U为电动机电枢端控制电压;R为电动机电枢电阻;L为电枢电感;I为电动机实际电流;Kb为电动机反电动势系数;Kz为电动机的电磁转矩系数;Gm为减速机构传动比.

图1 EPS总体结构图
1.2 车辆模型
为了能够反映低附着路面车辆运动状态,本文采用非线性二自由度车辆模型.忽略侧向风的影响,并假设车辆做纯转向运动,由Y轴方向和绕Z轴方向受力分析可得:
(10)
(11)
式中m为整车质量;u为车辆纵向速度;v为车辆侧向速度;ωr为车辆纵向速度;Iz为整车绕Z轴转动惯量;a为前轴至质心距离;b为后轴至质心距离;Fyfl,Fyfr分别为左、右前轮侧向力;Fyrf,Fyrr分别为左、右后轮侧向力.
1.3 轮胎模型
本文采用半经验魔术公式轮胎模型计算轮胎侧向力[12],则其数学模型如下:
E)α+Earctan ((2-μ)Bα)]}
(12)
式中μ为附着系数;D为峰值因子;C为形状因子;B为刚度因子;E为曲率因子;α为轮胎侧偏角.
单个轮胎垂向载荷可由整车动力学求得:
(13)
式中Fzfl,Fzfr分别为左前轮、右前轮垂向载荷;Fzrl,Fzrr分别为左后轮、右后轮垂向载荷;h为车辆质心高度;g为重力加速度;Tf为前轮轮距;Tr为后轮轮距.
车轮侧偏角的计算公式为:
(14)
式中αf,αr分别为前轮、后轮侧偏角.
2 低附着路面EPS控制策略
2.1 低附着路面轮胎侧向力估计
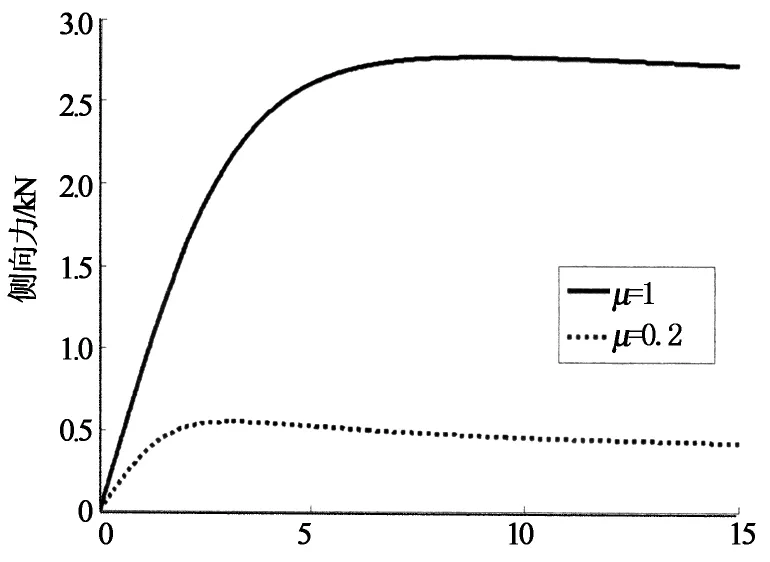
如图2所示,车辆在高低不同附着系数路面转向时,前轴侧向力有很大的区别.低附着路面前轴的侧向力要远远小于高附着路面,导致驾驶员失去路感.如果轮胎侧向力能实时测出,并把轮胎侧向力信号反馈给EPS的控制器,当车辆行驶在低附着路面时EPS助力随之减小,则能保持驾驶员路感,减少事故的发生.
侧偏角/(°)
对于轮胎力的测量,国外学者提出了一种smart tires,它内置传感器,可以直接测量出轮胎力[13-14].但是其结构复杂,成本较高,不易于大规模应用.因此我们选择基于车辆动力学模型的间接观测方法来估计轮胎侧向力.扩展卡尔曼滤波是卡尔曼滤波器应用在非线性系统的一种推广形式,可以用来建立针对具有非线性特征车辆的状态观测器,利用车载传感器直接测量得到的车辆状态参数并结合车辆动力学模型对轮胎侧向力进行估计.本文利用扩展卡尔曼滤波方法估计低路面附着系数时轮胎侧向力,并把此侧向力信号反馈给EPS控制器做闭环控制.
用二阶高斯-马尔可夫过程将轮胎力描述为待估参数:
(15)

将这些待估计的参数向量增补到车辆非线性状态方程式(10)和式(11)中,得到本文估计模型中的非线性状态方程:

(16)
系统的测量方程为:
y(t)=h(x(t),u(t))+v(t)
(17)

扩展卡尔曼滤波需要对连续的非线性方程进行局部转化处理,公式如下:
φ(t)=eF(t)·Δt≈I+F(t)Δt
(18)
其中
式中F(t),H(t)分别为非线性函数f(x(t),u(t))与h(x(t),u(t))对状态变量求偏导得到的雅克比矩阵;φ(t)为状态转移矩阵;Δt为采样时间.
本文根据文献[15]提出的初值选择方法对状态变量、误差方差阵P、系统噪声方差阵Q以及测量噪声方差阵R进行赋初值.估计轮胎侧向力的扩展卡尔曼滤波算法的具体流程如图3所示[16].

图3 扩展卡尔曼滤波工作流程
2.2 EPS电流补偿控制策略

(19)

图4 控制框图
3 仿真试验分析
3.1 模型验证
根据前文所述的数学模型,在MATLAB/Simulink软件中建立EPS系统仿真模型.为了验证此仿真模型的准确性,我们在雪路面和干沥青路面分别进行了相应的实车试验.试验设备如图5所示,SG-310型转向参数测试仪采集转向盘转角和转矩信号,并将该信号传输到移动数据记录仪进行数据处理.笔记本电脑用于监控和存储实验数据.
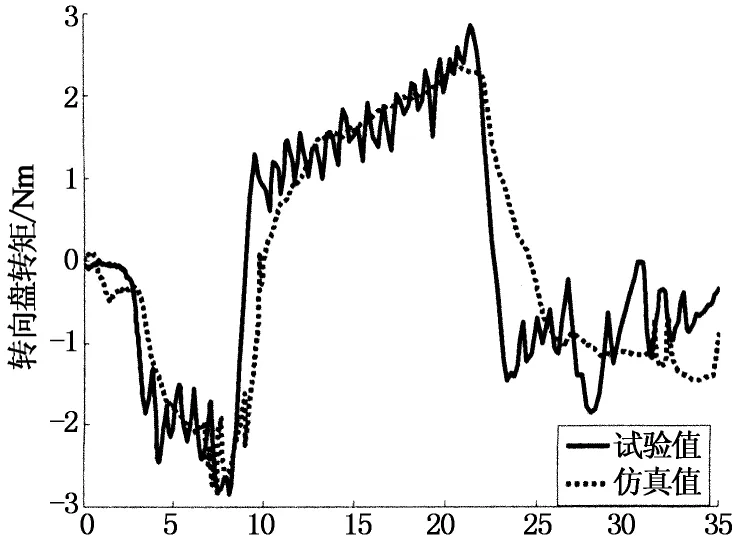
考虑到雪路面的行车危险性,我们仅做原地转向试验.雪路面的实验结果如图6所示,而干沥青路面的实验结果如图7所示.可以看出,在施加相同转向盘转角时,试验测得的转向盘力矩与仿真模型得出的转向盘力矩基本一致,说明仿真模型可以很好地替代实车模型用于控制器设计.

图5 实车试验设备
3.2 侧向力估计效果验证
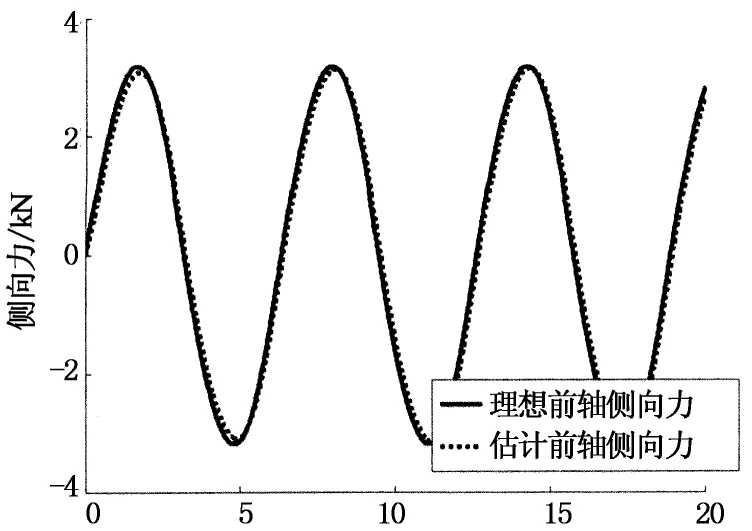
为了验证侧向力的估计效果,分别在不同车速和不同附着系数时对转向盘施加正弦激励,对比理想前轴侧向力和扩展卡尔曼滤波估计的前轴侧向力.如图8所示,实线表示理想前轴侧向力,虚线表示由扩展卡尔曼滤波得到的前轴侧向力.可以看出,估计值与理想值基本吻合,说明本文估计轮胎侧向力的方法可行.

t/s(a)转向盘转角输入
t/s(b)转向盘力矩对比

t/s(a)转向盘转角输入

t/s(b)转向盘力矩对比

t/s(a)车速30 km/h,附着系数1

t/s(b)车速30 km/h,附着系数0.2
t/s(c)车速60 km/h,附着系数1

t/s(d)车速60 km/h,附着系数0.2
3.3 控制器效果验证
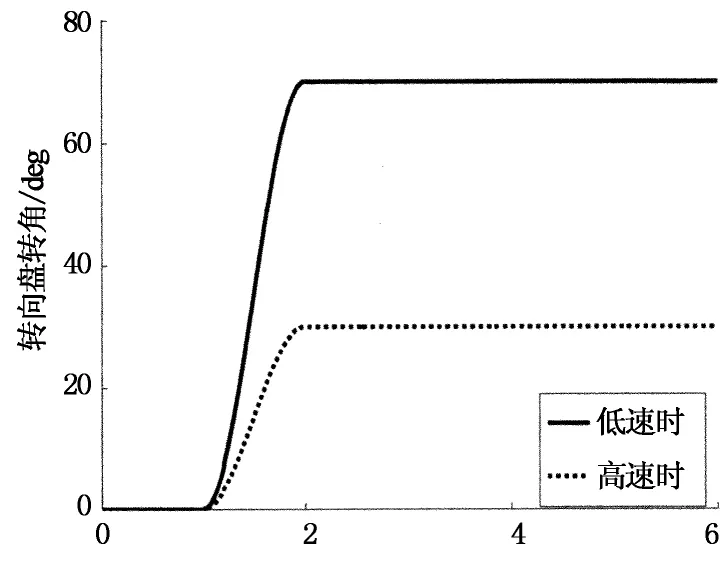
仿真工况为车辆在低附着路面(μ=0.2)行驶,仿真分别在低速(u=30km/h)和高速(u=60km/h)下进行,如图9所示,低速时转向盘施加90°斜坡阶跃转角信号、高速时施加30°斜坡阶跃转角信号.
t/s
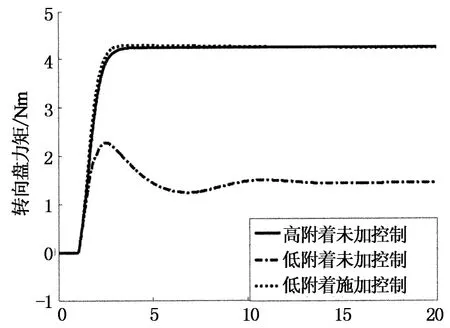
仿真结果如图10,图11所示,为了更好地说明控制效果,我们给出了高附着系数路面(μ=1)相同转向工况时转向盘力矩.可以看出,在施加了本文提出的控制策略后,转向盘力矩显著提高,使驾驶员在低附着路面下的路感与正常高附着路面相同,可以有效防止驾驶员的误操作.车辆高速转弯时,转向盘力矩减小量大于低速时,因此本文所提出的控制策略对车辆高速行驶尤为重要.

t/s
t/s
4 结 论
1) 针对低附着路面转向驾驶员容易失去路感的问题,详细分析了其产生的原因,提出了利用EPS电流补偿控制方法提高驾驶员路感.
2) 在MATLAB/Simulink软件中建立了EPS系统模型,并用实车试验数据验证了模型的准确性.
3) 利用扩展卡尔曼滤波器估计低附着路面前轴侧向力,并把该估计值用于EPS电流补偿控制器的设计.仿真分析验证了本文所提出控制策略的有效性.
[1] BADAWY A, ZURASKI J, BOLOURCHI F,etal. Modeling and analysis of an electric power steering system[C]// SAE Paper.1999-01-0399.
[2] 林逸,施国标,邹常丰,等.电动助力转向系统转向性能的客观评价[J].农业机械学报,2003,34(4): 4-7.
LIN Yi, SHI Guo-biao, ZOU Chang-feng,etal. Study on object evaluation of steering performance of electric power steering[J]. Transactions of the Chinese Society for Agricultural Machinery, 2003, 34(4): 4-7.(In Chinese)
[3] 赵万忠,施国标,林逸,等.基于遗传算法的EPS系统参数优化[J].吉林大学学报:工学版,2009,39(2):286-290.
ZHAO Wang-zhong, SHI Guo-biao, LIN Yi,etal. Parameter optimization of EPS system based on genetic algorithm[J]. Journal of Jilin University:Engineering and Technology Edition, 2009, 39(2): 286-290. (In Chinese)
[4] HE Zi-man, GU Meng-yan. Dynamic research on control strategy of electric power steering system[C]//SAE Paper. 2012-01-0212.
[5] 申荣卫,林逸,台晓虹,等.汽车电动助力转向系统转向盘转矩直接控制策略[J].吉林大学学报:工学版,2007,37(3): 504-508.
SHEN Rong-wei, LIN Yi, TAI Xiao-hong,etal. Steering torque direct control strategy for vehicle electric power steering system [J]. Journal of Jilin University:Engineering and Technology Edition, 2007, 37(3): 504-508. (In Chinese)
[6] 陈无畏,王妍,王启瑞,等.汽车电动助力转向系统的自适应LQG控制[J].机械工程学报,2005,41(12):167-172.
CHEN Wu-wei, WANG Yan, WANG Qi-rui,etal. Electric power steering on low friction coefficient road[J]. Journal of Mechanical Engineering, 2005, 41(12): 167-172. (In Chinese)
[7] 王启瑞,郁明,陈无畏.带滤波器的变结构控制在电动助力转向系统中的应用[J].农业机械学报,2005,36(7):15-19.
WANG Qi-rui, YU Ming, CHEN Wu-wei. Study on variable structure control with filter of vehicle electrical power steering system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2005, 36(7): 15-19. (In Chinese)
[8] DANNOHL C, MULLER S, ULBRICH H. H∞-control of a rack-assisted electric power steering system[J]. Vehicle System Dynamics, 2012, 50(4): 527-544.
[9] ZHANG Huai-quan, CHEN Shuan-yong. Electric power steering simulation analyze based on Fuzzy PID current tracking control[J]. Journal of Computational Information Systems, 2011, 7(1): 119-126.
[10]KURISHIGE M, TANAKA H, INOUE N,etal. An EPS control strategy to improve steering maneuverability on slippery roads[C]//SAE Paper. 2002-01-0618.
[11]赵林峰,陈无畏,秦炜华,等.低附着路面条件的EPS控制策略[J].机械工程学报,2011,47(2):109-114.
ZHAO Lin-feng, CHEN Wu-wei, QIN Wei-hua,etal. Electric power steering on low friction coefficient road[J]. Journal of Mechanical Engineering, 2011, 47(2): 109-114. (In Chinese)
[12]BAKKER E, NYBORG L, PACEJKA H B. Tyre modelling for use in vehicle dynamics studies[C]//SAE Paper. 870421.
[13]CHELI F, LEO E, MELZI S,etal. On the impact of ‘smart tyres’ on existing ABS/EBD control systems[J]. Vehicle System Dynamics, 2010, 48(1): 255-270.
[14]SABBIONI E, CHELI F, MELZI S. Development of an ESP control logic based on force measurements provided by smart tires[C]//SAE Paper.2013-01-0416.
[15]RAY L R. Nonlinear tire force estimation and road friction identification: Simulation and experiments[J]. Automatica, 1997, 33(10): 1819-1833.
[16]GREWAL M S, ANDREWS A P. Kalman filtering theory and practice using MATLAB[M]. America: John Wiley &Sons, 2008.
Control Strategy for Electric Power Steering on Low Friction Coefficient Roads
ZHOU Bing1,2†, XU Meng2, FAN Lu2
(1.State Key Laboratory of Automotive Simulaion and Control, Jilin Univ, Changchun,Jilin 130025, China;2.State Key Laboratory of Advanced Design and Manufacture for Vehicle Body, Hunan Univ, Changsha,Hunan 410082, China)
The steering resistance torque decreases dramatically on low friction coefficient roads. It leads to the decrease of the steering torque, which can influence the road feel of drivers to a large extent and cause accidents easily. To address this problem, a current compensation control strategy was proposed to improve the road feel of drivers. Extended Kalman Filter method was used to estimate the lateral force of front axle on low friction coefficient roads. Based on the estimated lateral force, the compensation current was calculated correspondingly. Moreover, the simulation model was built in MATLAB/Simulink, and it was validated by comparing the data of real car experiment with model simulation. Finally, simulation results of different driving conditions show that the steering wheel torque is significantly improved so that the road feel on low friction coefficient roads is equal to that on normal roads by using the proposed control strategy, which can effectively prevent driver's maloperation and improve driving safety.
vehicle engineering; electric power steering; extended Kalman filter; control strategy
1674-2974(2015)02-0029-06
2014-06-15
国家自然科学基金资助项目(51275162),National Natural Science Foundation of China(51275162);吉林大学汽车仿真与控制国家重点实验室开放基金资助项目(20121109)
周 兵(1972-),男,贵州习水人,湖南大学副教授,博士†通讯联系人,E-mail: zhou_bingo@163.com
U463.4
A
猜你喜欢
农业装备与车辆工程(2022年8期)2022-10-31
汽车实用技术(2022年10期)2022-06-09
北京航空航天大学学报(2021年4期)2021-11-24
专用汽车(2020年9期)2020-09-26
电子制作(2019年23期)2019-02-23
锻造与冲压(2018年7期)2018-05-29
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年21期)2016-04-11
