
基于RT-LAB的动车组牵引传动系统HIL仿真研究*
2015-03-07 08:46谢冰若赵红卫
铁道机车车辆 2015年3期
夏 菲, 谢冰若, 赵红卫
(中国铁道科学研究院 机车车辆研究所, 北京 100081)
综合技术研究
基于RT-LAB的动车组牵引传动系统HIL仿真研究*
夏 菲, 谢冰若, 赵红卫
(中国铁道科学研究院 机车车辆研究所, 北京 100081)
建立了基于RT-LAB的动车组牵引传动系统HIL仿真平台,介绍了其结构和配套开发的牵引系统故障模拟软件,最后进行了各种工况仿真研究。该平台不仅可用于正常工况下牵引系统静、动态性能仿真,还可用于牵引系统各种故障模拟、复现,具有较高的应用价值。
动车组; 牵引传动系统; RT-LAB; 硬件在环; 故障模拟
作为一种半实物仿真技术,硬件在环(Hardware in Loop,HIL)仿真广泛应用于动车组牵引控制单元(Traction Control Unit,TCU)研究,它采用dSPACE、RT-LAB等实时仿真机代替真实的牵引变流器和牵引电机等进行各种仿真试验,具有体积小、节能、安全便捷等优点[1-2]。
就动车组而言,不仅TCU,列车网络的中央控制单元(Central Control Unit,CCU)也参与牵引系统的控制管理,但分工不同。以某型动车组为例,CCU管理受电弓、高压主断路器、主变压器及冷却系统,综合司机牵引手柄和列车定速控制生成转矩指令下发给TCU。TCU根据CCU指令控制四象限整流器(4 Quadrant Rectifier,4QR)和逆变器以驱动牵引电机。现有动车组牵引传动系统HIL仿真多针对TCU建立,并没有考虑同样参与牵引系统控制管理的CCU。另一方面,现有牵引系统被控对象建模大都考虑正常模型,未考虑故障建模。
针对上述问题,在文献[3]讨论了动车组牵引传动系统被控对象正常建模和故障建模基础上,本文建立了将TCU/CCU集成为一体的动车组牵引传动系统HIL仿真平台,介绍了其结构和配套开发的牵引系统故障模拟软件,最后进行了各种正常、故障工况仿真研究。
1 动车组牵引系统结构
8辆编组的某型动车组含两个相同的牵引单元,1~4车为一个牵引单元,5~8车为一个牵引单元。以1~4车为例:1、3车为动车,2、4车为拖车。2车装有受电弓、主断路器和牵引变压器,为装有牵引变流器和牵引电机的1、3车提供动力。
每个动车含一个牵引变流器,它由2个并联的四象限整流器(包含预充电支路K1-R1和线路隔离开关K2),中间直流回路(包括二次谐振支路Lr-Cr-Rr,直流储能电容Cd,短路晶闸管支路ST-RST和制动斩波支路BT-RBT),1个三相两电平逆变器构成。牵引变流器与受电弓、主断路器、牵引变压器和4个并联的牵引电机一起组成完整的牵引传动系统主电路,如图1所示。
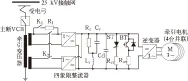
图1 动车组牵引传动系统主电路结构
2 动车组牵引传动系统HIL仿真平台结构
图2所示为8辆编组动车组牵引传动系统HIL仿真平台结构。它主要由2个车载CCU、2个车载显示屏、2个列车网络系统仿真机、4个车载TCU和1个RT-LAB实时仿真机组成。2个CCU分别位于两个端车,是整车控制器,其被控对象为整车电气线路和除牵引子系统外的各个子系统,分别由运行在2个工控机上的列车网络系统仿真软件模拟。2个车载显示屏也位于两个端车,主要用于显示整列车各子系统状态和故障代码。4个TCU分别位于4个动车,是牵引系统控制器,其被控对象均由RT-LAB实时仿真机模拟。
图2中,2个CCU之间由WTB总线连接。2个CCU与2个显示屏之间,2个CCU与4个TCU之间,2个CCU与2个工控机之间均由MVB总线连接。在2个工控机上,均配置了MVB驱动程序,以实现列车网络系统仿真软件与MVB总线的数据交互。
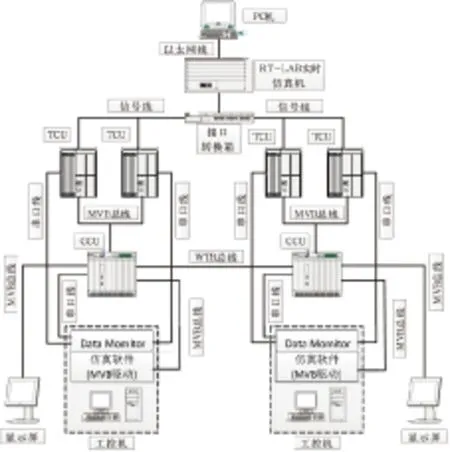
图2 动车组牵引传动系统HIL仿真平台结构
在用户接口方面,每个工控机上安装有数据在线监视软件,分别用来监控本牵引单元的CCU和2个TCU的故障代码和实时变量值,这通过串口通信实现。另一方面,可以在PC机上安装RT-LAB上位机监控软件,通过以太网线连接RT-LAB实时仿真机,来监控被控对象电压、电流的实时状态。
3 牵引系统故障模拟软件
使用RT-LAB的上位机监控软件触发各种牵引系统故障并不方便,需要使用其在线调整参数对话框,手动选取各种参数,在线修改并应用,过程较繁琐。为了提高故障测试效率,基于RT-LAB实时仿真环境,采用LabVIEW开发了牵引系统故障模拟软件。
牵引系统故障模拟软件主界面如图3所示。其主要功能包括:控制仿真启动、暂停、结束,触发牵引系统故障,显示牵引传动系统运行状态和主要部件工作状态,显示牵引传动系统电压电流实时波形并进行存储,在线调整系统参数等。
该软件可以模拟的牵引系统故障分为两大类:逻辑器件故障和系统级故障。逻辑器件故障主要用来模拟开关器件开路或短路。系统级故障具体可分为:高压系统相关故障、四象限整流器相关故障、中间直流回路相关故障、辅助变流器相关故障、牵引逆变器相关故障、牵引电机相关故障、牵引电机机械相关故障共7大类。
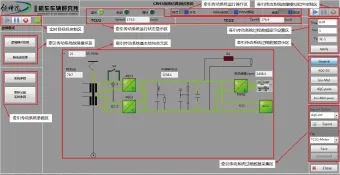
图3 牵引系统故障模拟软件主界面
4 正常工况试验
4.1 牵引变流器启动过程
牵引变流器启动过程如图4所示,给出了四象限整流器4QR1和4QR2的交流侧电压、电流波形,牵引变压器一次侧电流波形和直流母线电压波形。在70.16 s,预充电开关K1闭合,此时4QR1工作在不控整流状态(4QR2未工作),直流母线电压上升。在71.4 s时,TCU会进行制动斩波支路测试,即给制动斩波开关管BT发出两个约3 ms的驱动脉冲,随后关闭,TCU应检测到直流母线电压下跌。在76.3 s时,TCU闭合K2,断开K1,4QR2也进入不控整流状态。在77 s,预充电结束,TCU向4QR1和4QR2发出控制脉冲,使直流母线电压稳定在3 000 V。
4.2 牵引变流器全速域牵引过程
牵引手柄满级位,列车全速域牵引过程如图5所示,给出了4QR1、4QR2交流侧电压电流、变压器一次侧电流、直流母线电压、牵引电机A相电压电流、牵引电机电磁转矩和列车运行速度波形(这里数值为负数与参考方向选取有关)。随着列车速度提高,直流母线电压波动增大。在列车速度约140 km/h时,系统从恒牵引力向恒功区过渡。整个全速牵引过程中,半实物仿真试验台运行正常,输出波形稳定。
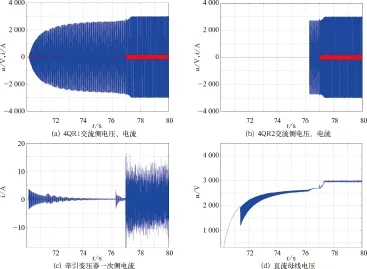
图4 牵引变流器启动过程
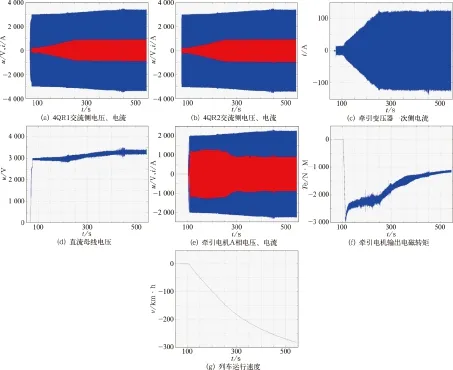
图5 牵引变流器全速域牵引过程
图6给出了列车在速度176 km/h时,牵引变压器一次侧电压电流、4QR1交流侧电压电流、直流母线电压、逆变器输出A相电压电流、牵引电机三相电流和输出电磁转矩波形细节。

图6 变流器电压、电流波形细节(列车速度v=176 km/h)
5 故障工况试验
5.1 两个并联的4QR电流不均衡过大
两个并联运行的4QR电流不均衡过大容易导致开关器件过流而损坏,TCU会实时监控4QR1和4QR2的电流,当两者之差超过某一阈值后,会封锁两个4QR和逆变器并报出该故障。图7给出了相关波形,系统正常运行至233.962 s附近,4QR1出现直流偏移(如图7(a)所示),此时TCU检测到两个4QR的电流之差超过阈值,立刻封锁两个4QR(如图7(a)、(b)所示),然后封锁逆变器(如图7(d)、(e)所示),由于电机属于感性负载,电流进行续流,中间直流侧电压略有抬升(如图7(c))。
5.2 逆变器三相电流之和不为零
设置该故障主要用来监测牵引电机是否存在漏电流。TCU将逆变器三相电流传感器反馈值进行相加,当其和大于一定值后,TCU会封锁逆变器,随后封锁2个4QR并报出该故障。图8给出了相关波形,当系统运行至274.139 s时,TCU检测到逆变器三相电流和不为0(如图8(d)所示),TCU立刻封锁逆变器(如图8(d)、(e)所示),由于电机属于感性负载,电流进行续流,中间直流侧电压有所抬升(如图8(c))。TCU封锁逆变器后,在274.149 s封锁4QR1和4QR2(如图8(a)、(b)所示)。
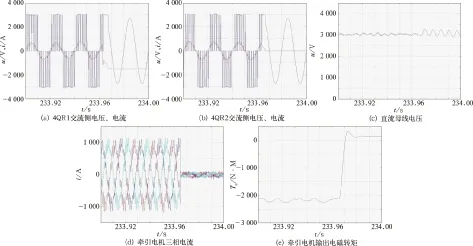
图7 两个4QR电流不均衡测试波形
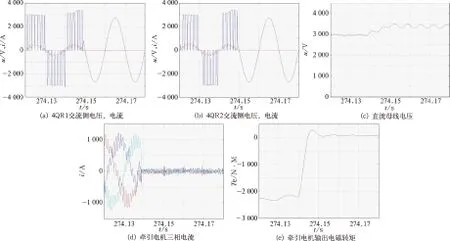
图8 逆变器三相电流和不为零测试波形
6 结束语
本文建立了与列车网络控制系统集成为一体的动车组牵引传动系统HIL仿真平台,它不仅可用于正常工况下牵引系统静、动态性能仿真,还可用于牵引系统各种故障模拟、复现,具有较高的应用价值。
[1] 马志文,李 伟,崔恒斌,韩昆.电动车组交流传动系统的硬件在回路实时仿真研究[J].铁道机车车辆,2011,31(2):1-5.
[2] 崔恒斌,马志文,韩 昆,等.电动车组牵引传动系统的实时仿真研究[J].中国铁道科学,2011,32(6):94-101.
[3] 谢冰若,夏 菲,赵红卫.动车组牵引传动系统HIL仿真平台被控对象建模研究[J].铁道机车车辆,2015,35(2)32-35.
Research on HIL Simulation of EMU Traction Drive System Based on RT-LAB
XIAFei,XIEBingruo,ZHAOHongwei
(Locomotive & Car Research Institute, China Academy of Railway Sciences, Beijing 100081, China)
This paper established the HIL simulation platform of EMU traction drive system based on RT-LAB, introduced the structure and fault simulation software of this platform, and carried out the simulation of various conditions. This platform has good application prospect, which not only can be used for static or dynamic performance simulation under normal conditions, but also can be used for fault simulations under different fault conditions.
EMU; traction drive system; RT-LAB; hardware-in-loop; fault modeling
1008-7842 (2015) 03-0001-05
女,助理研究员(
2015-02-12)
U266.2, TM461, TM464
A
10.3969/j.issn.1008-7842.2015.03.01
*国家重点基础研究发展计划(2012CB723803)
猜你喜欢
中国造纸(2022年8期)2022-11-24
青少年科技博览(中学版)(2022年1期)2022-03-28
一重技术(2021年5期)2022-01-18
海峡姐妹(2020年2期)2020-03-03
电子制作(2019年10期)2019-06-17
铁道通信信号(2018年11期)2019-01-19
通信电源技术(2018年5期)2018-08-23
电子制作(2018年10期)2018-08-04
制造技术与机床(2017年12期)2017-02-02
铁道通信信号(2016年11期)2016-06-01
