
基于飞行器陀螺仪信息采集系统设计
2015-03-06 01:31何建忠
电子科技 2015年7期
冯 彬,何建忠
(上海理工大学 光电信息与计算机工程学院,上海 200093)
由于飞行器在飞行过程中会遇到噪声大、稳定性不高等问题。飞控系统应具备实时性、可靠性、稳定性的优点。陀螺仪的特点是感应飞行器的各种姿态,确定飞行器的方位,是飞行控制系统自动采集信息的重要组成部分。陀螺仪按功能的不同可分为以下几类:陀螺稳定平台感受飞机的俯仰角和倾斜角,输送俯仰和倾斜信号给控制系统;航向陀螺是测量飞机偏航角的陀螺装置,给控制系统提供航向信号;角速率陀螺主要用于测量载体航向、俯仰和横滚3 个轴向的角速率,为控制系统提供角速率信号;角加速度传感器感受飞机的俯仰角加速度,为控制系统提供俯仰角加速度信号。目前国内运用到飞行器的陀螺仪采集精度不是很高,整个采集过程靠人工判断陀螺仪器件的性能,易产生误判率,低效率[1]。
本文提出一种基于飞行器信息采集的自动控制方法,可满足陀螺采集的高精度与高效率的需求,应用计算机技术,自动化控制技术,针对不同类型的陀螺仪设计并实现一种飞行器飞行过程中数据自动采集的系统[2]。陀螺仪传感器主要采集的是飞行姿态中的角加速度和角速率,用来分析和检查飞行姿态的稳定性与高精度化。测量方式是将陀螺仪传感器安装在飞行控制系统中,通过飞行器的机械振动来确定在不同航向飞行时的姿态变化,采用高精度方法去对姿态进行分析和计算,对采集的数据保存,以便分析航向姿态所遇到的不同情况数据。
1 信息采集系统的功能及总体结构
1.1 系统主要功能
系统主要设计了电源供电模块、电信号数据采集模块、电压采集模块、频率采集、相移信号采集等模块。针对飞行器陀螺仪信息采集系统,电源供电模块要选取角速率陀螺为三相36 V,400 HzAC 及±15 VDC 供电;陀螺仪通电会产生大量的电信号数据,在工作范围内系统自动采集模拟信号量用于测试信号的频率是否在正常工作条件下[2]。通过电压采集模块,陀螺仪输出的直流电压信号通过一定的分压后进行A/D 采集,交流电压信号通过A/D 转换为直流信号,信号系统对此进行高精度的测量分析;工作频率和相移信号能更加有利于飞行姿态数据的采集。
1.2 系统的总体结构设计
系统总体结构,如图1 所示。

图1 系统总体结构框图
本系统通过电源控制器为整个飞行过程供电,自动切换陀螺仪所需要的电源,使数据采集过程完全智能化;再使用飞行控制系统接收数据处理,计算机所发出的指令调整飞行姿态,进一步控制了陀螺的通断电,采集数据的过程及航向回零控制,测试量程的切换。陀螺仪通过信号放大电路将被采集的数据信号进行滤波放大,以获得良好的检测精度。根据工业控制计算机与数据记录卡连接,接收记录卡中的数据信号,以便飞行控制器正常读取。该系统的总体框图将各个模块进行了整合,方便数据的传输与采集。
2 运用卡尔曼滤波算法分析数据
2.1 离散卡尔曼滤波的算法理论
卡尔曼滤波算法[3-4]的特点是要求精确已知系统的噪声统计特性[5]。在实际应用中,噪声统计特性可能是部分已知,近似已知或完全未知的,基于不精确或错误的噪声统计特性会影响滤波性能[5]。针对这一问题,采用离散卡尔曼滤波算法对陀螺仪噪声特性大的问题进行数据采集测试。首先定义系统状态变量为xk∈Rn来表示n 维空间的一个向量;系统控制输入为Uk;系统过程激励噪声为Wk,可得出系统的状态随机差分方程为

定义观测变量Zk∈Rn,观测噪声为Vk,得到量测方程

滤波计算回路:状态估计

增益计算回路:状态一步预测均方误差

滤波增益

以上是离散卡尔曼滤波的基本方程,Γk-1为系统噪声驱动阵;Hk为量测阵;Wk为系统激励噪声序列;Qk为系统噪声序列方差阵;Rk为量测噪声序列的方差阵;Zk为量测值;在给定初值X0和P0的基础上,根据K 时刻的量测Zk,来推测状态估计
2.2 卡尔曼滤波的模型运用
姿态飞行过程中,陀螺仪角速度的数据是一项重要的采集数据。在先将陀螺仪参数统一为角速度值,在计算角度的同时,首先确定飞行器线性系统模型为

式中,Mk为飞行器姿态角度值;uk-1为角速度值;hk-1为角速率误差;dt 为时间周期。
飞行姿态中陀螺仪计算角速度

式中,v 是陀螺仪计算角速度;gyro 是陀螺仪采集到的数字量;D 是A/D 采样精度;Scale 是陀螺仪比率系数;f 是模拟电路运放的放大倍数,陀螺仪参数值统一为指定的角速度参数。采用卡尔曼滤波对陀螺仪传感器进行数据采集和融合,获得有效的飞行器姿态[6]。
先确定飞行器的姿态状态方程

再确定陀螺仪姿态系统模型为

上式,Xk为状态估计;UK为 系统已知输入值;Wk为系统噪声序列;lK为姿态角度值;uk-1为姿态变化角速度值,hk-1为角速率误差;dt 为时间。
结合卡尔曼滤波理论分析出飞行器中所遇到的噪声干扰大的问题,采集计算静态飞行的量测值和动态状态下的量测值,进一步分析出系统动态特性。通过卡尔曼滤波的实现来分析陀螺仪的测试数据,并对数据的代码仿真进行设计分析。在卡尔曼滤波算法的基础上,了解到陀螺仪在飞行平台下的不稳定性,加入数据融合的方法,可以进一步解决噪声干扰性大的问题,使输出的采集数据更加稳定可靠[6]。
3 系统测试实验平台
3.1 陀螺平台测试
实验测试平台过程是整个技术实现的关键,在对采集到的原始数据进行卡尔曼滤波融合的同时,也要先对陀螺仪数据采集系统的预设数据进行可靠性判断,再进行陀螺平台中角速度和线性度数据的采集进行测试,重点是对与预设数据进行比较,分析出测试过程中所遇到的问题,从而完成自动采集系统的高实时性和高精度的要求。本平台测试是为仿真测试打下可靠性保障,只有在陀螺平台下,才能调试出稳定高精度的采集数据[7-8]。如图2 所示。

图2 陀螺平台数据采集与调试
3.2 实验结果分析
通过微控制器对陀螺仪传感器采集的模拟量进行采集和处理,并通过无线模块将数据发送到工控机。采用图形化编程语言LabVIEW 实现对采集数据的波形进行仿真[9],分别显示飞行器在飞行过程中静态和动态测量姿态角的数据曲线,并经过卡尔曼滤波来进一步融合测量数据,从而输出飞行器飞行状态下的稳定波形。本实验为了验证通过卡尔曼滤波能够得出更稳定的数据曲线,在信息采集系统的运用中有一定的优越性。其中卡尔曼滤波曲线的横坐标是采样点数,纵坐标是姿态角度值[10]。
图3 和图4 分别显示出飞控系统中在静态情况下陀螺仪的原始姿态角波形和卡尔曼滤波所测试的数据波形。在外部振动影响不大的条件下,两者明显的曲线变化是在姿态过程中发生的变化,所输出的波形都不是很稳定的。
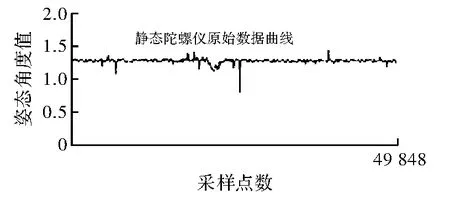
图3 静态下陀螺仪原始测量数据曲线图
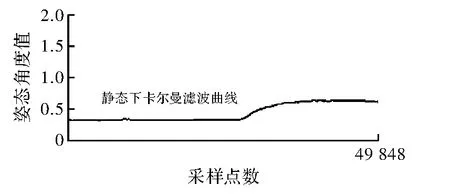
图4 静态下卡尔曼滤波数据曲线图
图5 和图6 在动态情况下,受到外界噪声影响比较大,可以看出前者受到的影响较大,稳定性不高,后者经过卡尔曼滤波后得到了比较稳定的数据波形,在一定程度上保证了飞行器的稳定性,更加适用于信息采集系统。

图5 动态下陀螺仪数据采集曲线图

图6 动态下卡尔曼滤波数据曲线图
4 结束语
通过输出的数据曲线可发现无论是在静态或是在动态情况下,卡尔曼滤波都能够获得稳定的波形曲线。本系统是综合了计算机技术、仪器技术和自动控制技术,提出的一种融入卡尔曼滤波算法的采集系统。针对不同类型的陀螺仪设计并提高了陀螺仪信息数据采集系统的稳定性,经过陀螺平台的调试和卡尔曼滤波算法的理论分析,使系统具有高精度及高效率。本文设计的信息采集系统,具有高精度、高稳定度、良好的环境适应性等优点,可适应飞行器中高精度高稳定控制要求,具有良好的发展和应用前景。
[1] 刘丰军,尹利国.一种陀螺仪自动测试系统的设计与实现[J].计算机测量与控制,2006,14(1):112-114.
[2] 胡广书.数字信号处理理论、算法与实现[M].2 版.北京:清华大学出版社,2003.
[3] Kalman R E.A new approach to linear filtering and prediction problems[J].Journal of Basic Engineering Transactions of the ASME,1960,82(SeriesD):35-45.
[4] Kalman R E,Bucy R S.New methods and results inLinear filtering and prediction theory[J].Journal of Basic Engineering Transactions of the ASME,1961,83(SeriesD):95-108.
[5] 邓自立.自校正滤波理论及其应用--现代时间序列分析方法[M].哈尔滨:哈尔滨工业大学出版社,2003.
[6] 秦永元,张洪钺,王叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998.
[7] 黄知涛,郑龙席.高性能数据采集系统中信号的低通滤波原理及实践[J].测控技术,1999,18(5):55-56.
[8] 李杰,马幸,刘俊,等.小型惯导系统数据实时采集处理与存储设计[J].中国惯性技术学报,2008,16(3):274-277.
[9] 董介春.基于LabVIEW 的虚拟示波器的设计与实现[J].青岛大学学报,2002,17(3):59-60.
[10]江杰,朱君,岂伟楠.四旋翼无人飞行器姿态数据采集处理系统[J].计算机测量与控制,2012(6):1703-1706.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
测控技术(2018年12期)2018-11-25
百科探秘·航空航天(2017年9期)2017-12-31
北京航空航天大学学报(2017年9期)2017-12-18
中学生数理化·高一版(2017年3期)2017-07-08
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
电测与仪表(2016年21期)2016-04-11
电源技术(2016年9期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
