
一种基于接收相参的鸟类目标探测雷达
2015-03-06 01:30王胜国吴霞飞
电子科技 2015年7期
王胜国,孔 繁,吴霞飞,张 琳
(中国电子科技集团公司第27 研究所 测控雷达部,河南 郑州 450047)
雷达探测是防范鸟击的重要手段,利用雷达探测鸟类目标建立鸟情预警平台及模型,可针对性地驱散和避开鸟群,是降低鸟击风险的有效途径[1-3],因此研究鸟类目标探测成为业界重要研究课题。利用雷达探测鸟情具有特殊的优势,不仅是因为其自动化程度高、数据分析方便,更重要的是雷达比其它探测手段受能见度和恶劣天气的影响小,能全天候工作。鸟情监视雷达的探测目标具有高机动、小雷达散射截面积(RCS)的特点[4-5]。另外,同一只鸟处于不同状态时,因飞行方式不同,其RCS 也有变化。因此雷达回波功率通常均较低,必须采用相参积累,达到以时间换取能量的目的。该雷达设计采用堆积多波束环扫三坐标雷达体制,采用窄脉冲、大功率磁控管发射机解决系统的盲距要求;采用接收相参技术改善地杂波因子,增强对小目标检测能力。通过样机研制及外场数据分析,验证了雷达方案的可行性。
1 系统构架及原理
本文提出的鸟类目标探测雷达系统主要由天伺馈、发射机、信道组件、光端机组件、信号处理、数据处理及操控终端组成。而系统的处理主体如图1 所示,由鉴相式瞬时测频、数字下变频(DDC)、低通滤波(LPF)、数字稳定校正单元(DSU)、动目标显示(MTI)、动目标检测(MTD)、恒虚警检测(CFAR)、杂波图检测和解距离模糊等算法模块组成。

图1 系统处理框图
为了解决系统盲距并控制成本,在设计上优选磁控管发射机。但由于磁控管发射机的起始相位不稳定、存在幅度抖动和频率漂移,正常情况下无法对接收回波做相参积累,所以当回波信号进入信道组件时首先采用鉴相式瞬时测频技术完成频率漂移校正,然后通过信号处理中的数字下变频、低通滤波、接收相参等处理模块完成幅度与相位不稳定性的校正,再由动目标显示、动目标检测、恒虚警检测及杂波图检测等得出鸟类目标的距离、方位、高度及幅度等参数。如图1 所示,为了能够实现相参处理,鉴相式瞬时测频和DSU 是本文的重点,通过这两个部分保证了系统的相参性。
2 瞬时测频设计
由于磁控管的频率不稳定性,一般会在射频的约5%,所以设计考虑在接收机上通过瞬时测频方式[6]来获得频率的稳定性。瞬时测频主要分为鉴相式[7-9]、多通道式、计数式以及驻波式等测频方式。近年来,由于AD8302 等专用鉴相器件以及FPGA 等大规模数字逻辑电路的出现,鉴相式瞬时测频由于其输入动态大、温度特性好、体积小、测频速度快等特点被广泛应用。
本设计在接收信道采用跟踪本振对发射机耦合出的信号进行鉴相式瞬时测频,由于本系统工作于X 波段,直接测频频率过高,不易实现。经综合考虑后将X波段频率变换到L 波段后再进行测频,能利用国内现有器件实现系统的瞬时测频。根据测出的频率调整第二本振的频率,从而保证二中频频率的稳定。
鉴相式瞬时测频主要将雷达发射机射频脉冲信号功分两路后输出信号,其工作原理如下
一路为未经延迟后的信号输出

式中,f 为频率;t 为时间;A 为信号幅度。另一路经延迟线后的信号输出为

式中,td为射频延迟线的延迟时间。两路信号经混频、低通滤波器后的信号输出为

同理,经过延迟后的信号经过90°移相后再和未经延迟线的信号进行混频、低通滤波输出为

因此,两路信号的输出比例与输入两路同频信号的相位差2πftd。由于延迟时间td为常数,鉴相器输出的两路信号幅度与输入载频成比例,从而能进行频率测量。其流程如图2 所示。
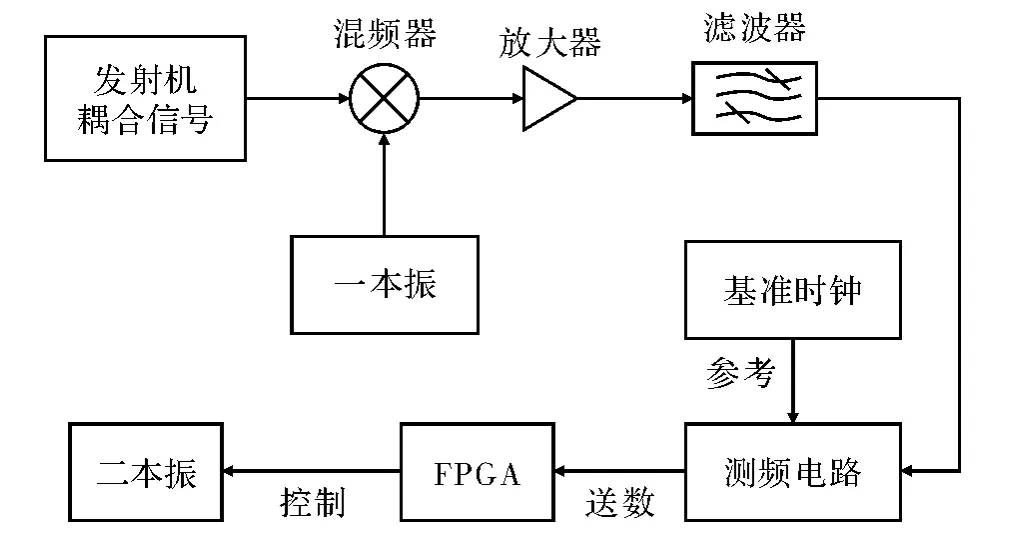
图2 瞬时测频原理框图
3 数字稳定校正单元设计
通过对跟踪本振的频率测量,在频率上对发射信号进行校正,但相位和幅度的不稳定性未得到解决,所以设计考虑在信号处理部分来实现相位和幅度的校正,这样既可节约成本又便于实现。系统设计在信号处理过程中加入数字稳定校正单元(DSU)[10],DSU 是利用发射信号对接收的回波信号进行匹配来获得相参性。该方法易消除发射脉冲相位和幅度不稳定对动目标改善因子的影响,使其具有较好的相参接收效果。设雷达发射的脉冲信号为

式中,An(t)为第n 次发射的脉冲幅度;Φ0n为初相;ωn(t)为角频率,目标的雷达回波信号为

式中,Kr是接收信号衰减;Tr是发射脉冲与目标回波的延迟时间。考虑到发射频率不稳定因素,ωn(t)可写为

式中,ω0是额定角频率;Δωn是起伏量;2an为一阶漂移系数。设雷达本振为ωc,则,其中为实际系统中存在的固定偏差。在此定义一个新的变量δωn=ω+Δωn,经过正交鉴相后得到的零中频复信号为

式中,阻碍接收相参的因素是Kr、An、δωn、an、Φ0n。将发射信号采用,经同一个接收通道可得到的复信号为

式中,Kt为发射取样信号的衰减,为消除回波信号中的相位和幅度的不稳定因素,将回波信号与发射样本信号作卷积处理得到


用式(11)除式(10),得

4 仿真与试验分析
4.1 仿真数据分析
基于信号处理数字稳定校正单元设计进行仿真分析,设计中频输出f0为75 MHz,脉冲宽度τ 为5 μs,采样率为100 MHz,样本与回波频偏为1 kHz,幅度与相位初始为随机数值。
通过数字下变频、抗混叠滤波得到DSU 前IQ 两路基带信号及基带信号相位,从图3 中可看出由于幅度和相位偏移,信号杂乱无章,根本无法进行后续处理。经过DSU 后基带信号得到了比较稳定的幅度和相位,从而使得相参处理成为可能。

图3 DSU 性能仿真
4.2 外场试验数据分析
下面对一个冬天的上午和下午的外场试验数据进行Matlab 分析,试验采用小型无人飞行器模拟真实目标,飞行器本身速度约为10 m/s,和大多数鸟类的飞行速度相当,因此飞行试验数据分析对测试整个鸟类目标探测雷达系统的性能指标有实际意义[11-12]。
图4(a)为雷达扫描10 圈对飞行器回波进行处理后叠加的效果图,其中离图像中心最近的点为雷达扫描第一圈时飞行器的位置,最远点的点为雷达扫描第10 圈时飞行器的位置,图中只有9 个飞行器的原因可能为由于飞行器距离雷达天线很近,采集第一圈数据时,飞行器高度较低,尚未进入雷达波束范围,从图中可看出,飞行器近似沿着径向远离雷达飞行,从图4(b)中可看出飞行的速度近似为1.71×6=10.42 m/s。
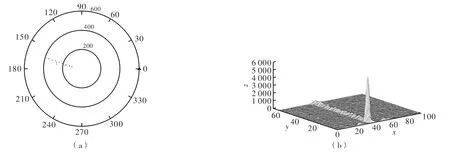
图4 外场试验数据Matlab 分析
4.3 外场试验终端显示分析
在雷达系统操控终端上能够清晰地得到Matlab数据分析结果。如图5(a)和图5(b)是采用小型无人飞机器在空旷场地的实验结果,经过数据处理,以显控计算机截图中可清楚地看到目标,并显示了目标飞行的轨迹变化。图5(c)是在复杂环境下的实验结果,白点显示为杂波干扰,对飞鸟目标探测结果以白色圆圈标识。实际测试结果验证了本文提出的基于接收相参的机场鸟情监视雷达的技术可行性。

图5 鸟类目标探测雷达终端截图
5 结束语
经多次外场系统联试,硬件和软件的各项功能均已得到验证,主要功能模块DSU、相参积累、MTI、MTD、杂波图处理、恒虚警处理均已达到设计要求,基于接收相参的鸟类探测雷达方案基本成型,通过仿真和试验数据分析,在Matlab 上级显控界面上均可清晰直观的得到目标的位置变化,验证了该雷达的技术可行性。下一步工作主要是在真实环境下测试整个雷达系统在相对较恶劣的气候条件下的适应能力以及真实鸟类高机动飞行下的性能检测,为进一步研究机场鸟情监视雷达提供经验和技术支撑。
[1] 刘勇.机场鸟害防治重在综合治理[J].中国民用航空,2003,33(9):55-56.
[2] 熊杰.飞行中防止鸟击的方法[J].中国民用航空,2003,30(6):52-54.
[3] 卢健利,杨文上.机场鸟类探测系统的设计与实现[J].激光与红外,2012,42(7):775-777.
[4] 陈唯实.基于鸟类目标散射特性分析的雷达探鸟实验[J].航空学报,2009,30(7):1312-1318.
[5] 宁焕生,刘文明.航空鸟击雷达鸟情探测研究[J].电子学报,2006,34(12):2232-2237.
[6] 孙亚伟,黄建冲.雷达信号瞬时频率及其统计特征的提取[J].舰船电子对抗,2011,34(3):19-23.
[7] 王春雷,张学成.基于新式宽频鉴相器瞬时测频电路的设计[J].舰船电子对抗,2013,36(1):106-108.
[8] 赵鹏,王志强,范海玲.通用鉴相式舒适测频模块设计[J].半导体检测与设备,2013,38(3):231-234.
[9] 胡来招.瞬时测频[M].北京:国防工业出版社,2002.
[10]王胜华.基于FPGA 的数字稳定校正单元的实现[J].电子设计工程,2012,20(11):175-178.
[11]李波,杜春鹏.运动平台进行杂波跟踪的方法分析[J].电子科技,2012,25(2):48-50.
[12]张俊华,杨根,徐青.雷达对可探测空间目标的快速筛选方法[J].计算机仿真,2011,28(11):10-13.
猜你喜欢
学与玩(2022年9期)2022-10-31
凤凰动漫(军事大王)(2022年1期)2022-04-19
柳州职业技术学院学报(2021年6期)2022-01-26
遥测遥控(2020年3期)2020-09-17
文苑(2020年12期)2020-04-13
小太阳画报(2019年1期)2019-06-11
电子制作(2018年2期)2018-04-18
电子技术与软件工程(2017年24期)2018-01-17
小学生必读(低年级版)(2017年5期)2017-08-12
现代计算机(2016年34期)2016-02-28
