
基于DSP 的永磁同步电机全速范围转子定位
2015-03-06 01:30刘慧君
电子科技 2015年7期
朱 军,田 淼,刘慧君
(河南理工大学 电气工程与自动化学院,河南 焦作 454002)
永磁同步电机的控制策略,例如矢量控制,需要精确的全速范围内的转子位置进行解耦变换[1-2]。而其中转子初始位置最为重要,初始位置的误差会影响其后转子位置的计算,从而导致永磁同步电机解耦变换错误,导致无法对电机进行正确控制。针对传统的磁定位法[3],可能由于电机静止时转子位置位于定位盲区,普通的直流转矩不能使转子旋转到预定位置,使用改进的磁定位法,通过二次直流转矩定位,精确定位转子初始位置。针对传统的M/T 算法存在检测时间、误差大的问题[4-6],使用改进的M/T 算法,缩短了计算时间和提高了计算精度。
1 改进磁定位法原理
磁定位法原理是通过给逆变器发出直流触发脉冲信号,例如图1 脉冲信号为(100)输出给电机定子绕组静止的电流矢量。

图1 永磁同步电机与逆变器
其产生的直流转矩会将定子旋转到固定位置,从而完成永磁同步电机的转子初始位置定位,原理如图2所示。

图2 磁定位法原理
永磁同步电机的电磁转矩公式为

式中,Fs为定子磁势;Fr为转子磁势;K 为由电机参数决定的常数;θsr为转子磁势和定子磁势的夹角。
由式(1)可知,电磁转矩将使电机转子向θsr减小的方向旋转,直到电磁转矩与电机固有转矩达到稳定的平衡点。最终使转子D 轴与电机A 轴重合,完成转子的预定位。但转子位置在预定前是随机的,当施加电压矢量为直轴负方向时,θsr=90°,电磁力矩Tem则等于0。转子的磁定位会由于转子不转动而失败。
为了避免转子位置位于上述的定位盲区,使用二次定位。在转子预定位前,在与预定位置相差90°的位置施加一个电压矢量,使转子位置离开上述定位盲区,然后再施加原定的电压矢量,将已离开定位盲区的转子定位到预定位置,完成转子的预定位操作。
2 变M/T 法原理
增量式光电编码器旋转一圈会发出A 相、B 相和Z 相3 路脉冲。其中,A 相和B 相为两路正交脉冲信号,Z 相脉冲等于编码器旋转圈数[7-8]。其输出波形如图3 所示。
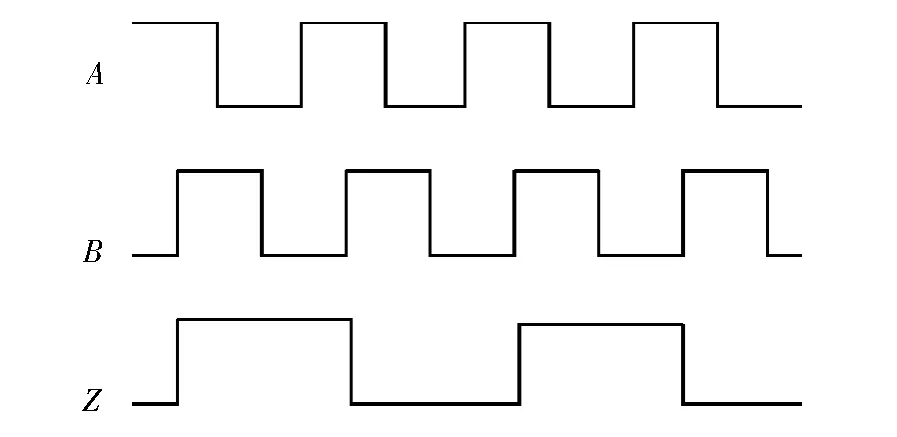
图3 编码器输出波形
M/T 法原理为测周期/频率法,原理是在检测时间和此时间内编码器发出的脉冲个数[9-10]。设1 个时间间隔为Tg,Tg后检测到的第1 个编码器脉冲终止DSP 的内部脉冲计数器,计此时脉冲计数器值为m2,并用m2来测量检测时间T,且

设N 为编码器旋转一周发出的脉冲数;m1为T 时间内编码器发出的脉冲数;X 为T 时间内电机转过的角度位移,及

则电机转速可表示为

设参考时钟的频率为fc,则可有m2计算出检测时间T,T=m2/fc。则电机转速可推导为

但上述M/T 法存在检测信号时间过长,检测误差大的问题,针对此问题,提出了变M/T 法。其原理是在检测高频时钟脉冲和编码器信号脉冲的同时,采用随编码器发出脉冲信号而变化的时间Tg。取Tg=m3/fc,m3不含ΔT 时间内的高频脉冲个数。则电机转速可表示为

转子位置信息可推导为

其中,θ0为电机的转子初始位置;p 为电机极对数。式(7)可化简为

该方法在高速和低速情况下,检测精度与检测时间均优于传统M/T 法。
3 实验
实验选用的DSP 为TI 公司的TMS320F28335,永磁同步电机的额定功率为500 W,极对数为4,编码器为2 500 线。实验平台如图4 所示。
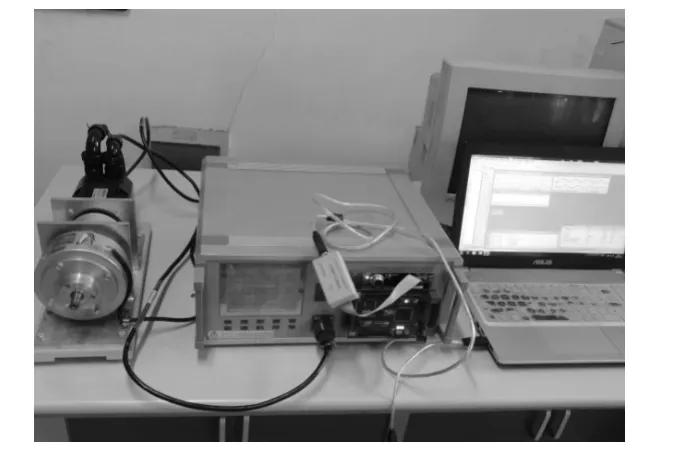
图4 实验平台
全速范围的转子位置定位系统框图如图5 所示。
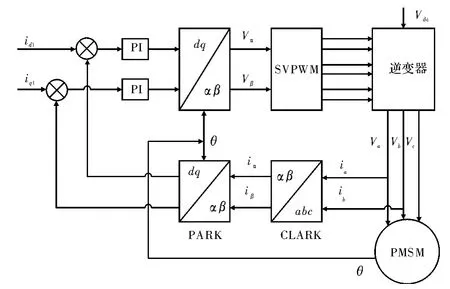
图5 系统框图
电机静止时,通过使用DSP 输出PWM 波给三相逆变器,使其输出两次直流电压进行二次定位,将转子位置牵引到预定位置。电机运行时,DSP 的事件管理器捕获编码器输出的A 相和B 差分相脉冲信号计算出转子实际位置,从而进行转速和转子位置的检测。整个系统的软件流程图如图6 所示。

图6 系统流程图
电机静止时进行转子初始定位输出的A 相和B相电流值如图7 所示。

图7 A 相和B 相电流
图8 为经PARK 变换后的励磁电流值,产生的励磁转矩将使电机旋转到固定位置,在实验中设定为0.75,即相位为270°,或-90°,电机此时处于-90°下的固定转矩电流作用下,从而找到相位的初始位置。

图8 励磁电流
电机启动后,转速为300 时的转子位置和A 相电流如图9 所示。

图9 转子位置和对应的A 相电流值
电机在300 转速时的励磁电流和实时速度如图10所示。

图10 励磁电流和实时速度
由图9 和图10 可得出,变M/T 法能在电机低速时准确的检测出转子位置信息,并能较好地计算出实时转速。
图11 为电机转速为1 200 时的转子位置和A 相电流图。

图11 转子位置和A 相电流
1 200 转时励磁电流和实时转速,如图12 所示。
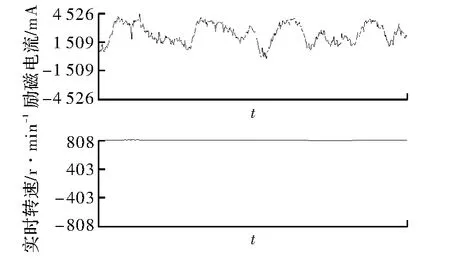
图12 励磁电流和实时转速
由图11 和图12 可得出,变M/T 法在电机高速时也能准确地检测出转子位置信息,并能较好地计算出实时转速。对比转速300 r·s-1和1 200 r·s-1的实验结果可知,该方法在电机低速和高速时均能较好地测得转子位置和转速。
图13 为电机转速图,该方法检测的转子初始位置和运行时转子位置能满足永磁同步电机的矢量控制需求,电机起动快速,在300 转和1 200 转均能稳定、可靠的运行。
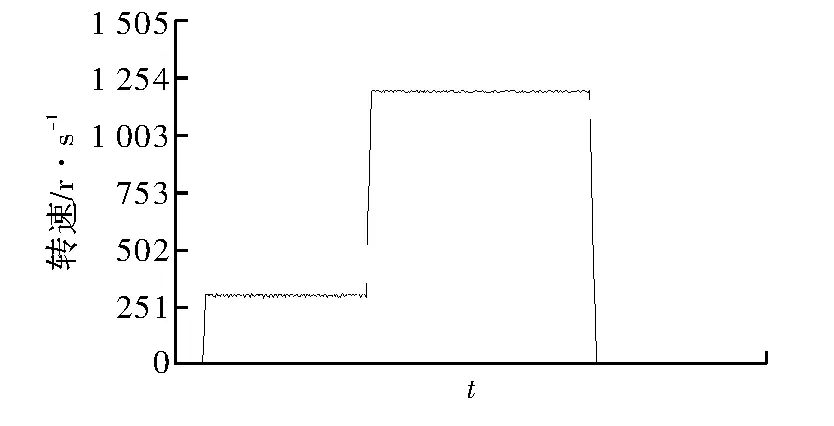
图13 电机转速图
4 结束语
实验结果表明,该方法在电机静止时能很好地进行转子初始位置定位。在电机低速和高速运行时,均能较好地检测出转子位置信息,其反馈转子位置信息能使电机进行正常的矢量控制。
[1] 方国维,罗文广.基于神经网络补偿的永磁同步电机控制[J].电子科技,2013,26(4):143-149.
[2] 王斌,王跃,王兆安.空间矢量调制的永磁同步电机直接转矩控制[J].电机与控制学报,2010,14(6):45-50.
[3] 王晓明,王玲.电动机的DSP 控制TI 公司DSP 应用[M].北京:北京航空航天大学出版社,2004.
[4] 于庆广,刘葵,王冲,等.光电编码器选型及同步电机转速和转子位置测量[J].电气传动,2006,36(4):17-20.
[5] 高敏,张烁,朱明.基于DSP 的M/T 测速法[J].宿州学院学报,2013,28(3):84-86.
[6] 汪涛,黄声华,万山明.一种基于DSP 的伺服电动机转速检测方法[J].微电机,2006,39(3):88-94.
[7] 郇宝贵,雷斌,王鹏.基于FPGA 增量式编码器的接口设计与实现[J].电子科技,2011,24(9):51-53.
[8] 高伟,王云龙,金勇.增量式光电编码器在交流伺服系统中的应用[J].电气自动化,2011,33(6):36-38.
[9] 王翔,赵香桂.基于DSP2812 的三种电机转速测量方法研究[J].电气传动自动化,2011,33(1):54-57.
[10]张涛,杨振强,王晓旭.应用eQEP 及编码器测量电机位置与速度的方法[J].电气传动,2011,41(4):48-51.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
防爆电机(2022年3期)2022-06-17
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
成都信息工程大学学报(2018年3期)2018-08-29
西安工程大学学报(2016年6期)2017-01-15
光学精密工程(2016年3期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
