
BCM集成刮水洗涤控制系统关键技术分析
2015-03-01 03:27陆叶,罗峰
汽车电器 2015年11期
陆 叶,罗 峰
(同济大学汽车学院,上海 201804)
1 刮水洗涤控制系统简介
汽车刮水的主要功能为刮除挡风玻璃上的水渍和污垢,以提供驾驶者清晰的视野。刮水系统是车身控制必须具备的功能,随着汽车产业的发展,安装在汽车上的BCM控制器功能越来越强大,因此,为降低整车成本一般会将刮水洗涤控制功能放在BCM中实现[1]。
为方便驾驶员控制刮水器,减少行驶过程中根据雨量变化手动操作刮水器的次数,这就要求BCM集成的刮水控制系统可以实现更加复杂的控制逻辑功能,可以结合车辆运行的状态自动切换不同的刮水速度档位 (比如结合车速、或者雨量传感器信号等)。
传统刮水洗涤控制系统如图1所示,由开关和刮水执行器组成。
这种控制方式功能只有简单的低速、高速功能,刮水自动回位通过刮水电机内部的复位器通过硬件实现。这种传统的刮水控制系统的缺点是功能单一,需要驾驶员根据实际雨量状态等手动切换刮水状态,舒适性不强。
为低成本解决这个问题,可以将刮水控制功能集成到车身控制模块BCM中,由BCM实现刮水的高速、低速等功能的控制。BCM可以根据整车采集的信号实现对刮水及洗涤系统进行智能控制,提供不同的功能逻辑,以达到提高刮水洗涤系统舒适性的效果。
2 刮水洗涤控制系统的分析
2.1 系统组成
整个刮水控制系统由3部分组成:刮水开关、BCM控制器和刮水执行器。如图2所示。
刮水开关档位定义见表1。除了刮水控制开关外还有一个AD(模拟量)开关类型用作间歇档刮水调速功能,通过不同电阻阻值分为4~6个档位,用作客户间歇延时长短的控制。
BCM作为刮水逻辑控制器,通过采集到的开关状态使刮水器工作在不同模式。
执行器主要就是刮水电机,通过BCM给过来的控制信号会执行在不同的速度模式下,或者停止运行。刮水电机会将回位Park(停止位)信号回馈给BCM,这样BCM可以通过Park回馈信号判断刮水器的当前状态。
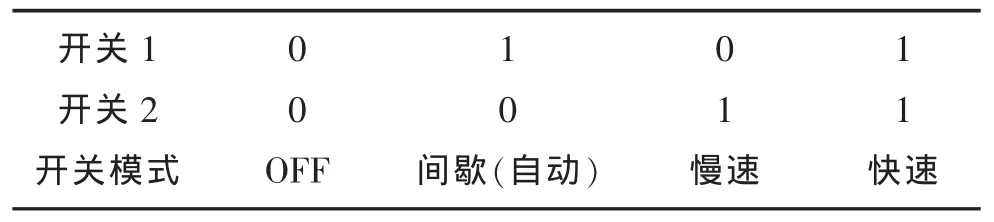
表1 刮水开关档位定义
2.2 控制功能分析
由于BCM可以获取车辆很多运行状态,这样可以结合车辆不同的信息用于辅助刮水器的控制,丰富控制逻辑,提高刮水功能的舒适性。
1)慢速刮水模式
开关模式在慢速模式下,BCM输出前刮水使能信号,使前刮水电机运行于慢速模式下。在前刮水电机运行在慢速模式的情况下切换刮水开关到OFF模式后,BCM会继续输出使能信号,直到收到刮水电机给出的有效Park事件信号后停止输出,使得刮片停止在停止位上,保证刮片不会停在前挡风玻璃中间影响驾驶员视线。
2)快速刮水模式
开关模式在快速模式下,BCM同时输出前刮水使能和快速信号,使前刮水器工作在快速模式下。在前刮水电机运行在快速模式的情况下切换刮水开关到OFF模式后,BCM会继续只出使能信号使刮水电机以慢速继续运行,直到刮水电机给出有效Park事件信号后停止输出,使得刮片停止在停止位上,保证刮片不会停在前挡风玻璃中间影响驾驶员视线。
3)间歇刮水模式
在雨量小到不需要慢速刮水的情况下就需要使用间歇刮水模式。间歇刮水模式可以通过调节两次刮片刮动的间隔时间来达到最合适的刮动频次。间歇刮水的原理是通过慢速刮水模式使刮片转动,在转动到停止位后BCM使刮片停止工作,同时内部启动延时定时器,等到延时完成后BCM再使刮片工作在慢速模式,到下一个停止位重新延时。
可以根据刮水延时调试开关来选择不同的延时长度,这样可以方便驾驶员根据实际情况选择最舒适的延时模式,达到减少驾驶员切换刮水开关的频次。
前挡风玻璃上的雨量会随着车速增加而增加,因此驾驶员在行驶过程中会由于这个变化不得不手动切换前刮水器的工作模式。为了提高驾驶员在这种场景下的控制舒适性,在延时控制时会考虑到车速对雨量变化的影响,并通过自动调节延时时间使驾驶员使用起来更加方便。这样通过延时开关可以给驾驶员提供不同的动态延时灵敏度的选择,延时控制的参数见表2。
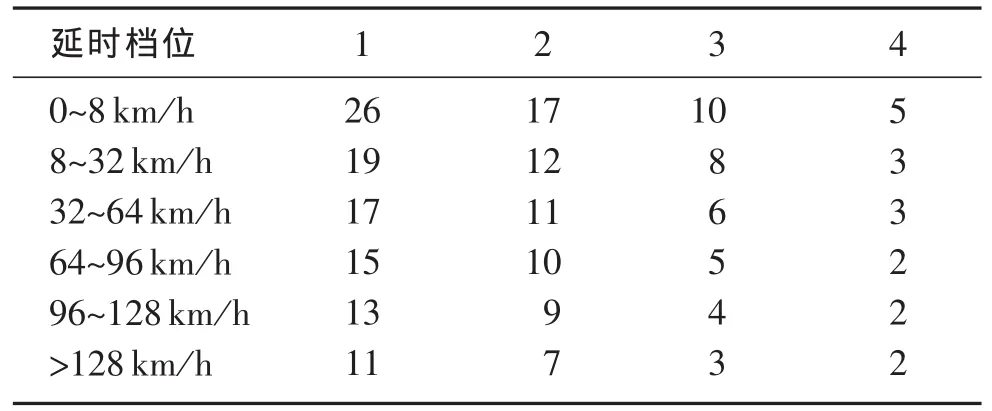
表2 档位延时对照表
表2的数据都存储在BCM的EEPROM(电可擦除只读存储器)区域,通过诊断可以进行修改。表2中的数据是根据具体车型上标定得来,在开发阶段可以通过实际的标定进行设定[2]。
4)自动刮水模式
为满足更加智能化的刮水控制功能,可以在车上选装雨量传感器模块,通过LIN总线将雨量信息传递给BCM,这样BCM就可以实现智能刮水的控制功能,而为此增加的成本也不大,能很好地丰富车辆的配置。
开关模式在间歇模式下BCM会工作在自动刮水模式下 (通常考虑到高低配车型使用相同的刮水开关模块,因此会复用间歇模式用于高配的自动模式)。雨量传感器通过对前挡风玻璃的雨量大小计算出刮水应该工作的模式,并通过LIN的请求信号发送给BCM。
BCM在收到正确的雨量传感器请求信号的情况下,会根据雨量传感器的指令切换不同的刮水工作模式,这样完全可以使驾驶员不用再通过手动来调节。考虑到不同驾驶员对于雨量大小感知不同,因此雨量传感器有不同等级的雨量灵敏度可供客户选择最舒适的灵敏度。这时BCM会将延伸档位复用作灵敏度调节功能发送给雨量传感器,客户就可以直接选择自己喜欢的灵敏度档位。
如果雨量传感器损坏或者LIN通信出现异常,BCM会检测到相关故障并退出自动刮水模式,进入普通间歇刮水模式继续工作,保证刮水器不会由于这个原因停止工作。
5)智能喷水刮水功能
驾驶员经常使用前喷水来清洗前挡风玻璃上的灰尘,BCM会在检测到前喷水开关后延时1.5s后自动开启前刮水慢速模式,使前刮片刮动3次,将喷洒在玻璃上的清洗液刮去。考虑到刮完3次后还会有少量的水滴流下来影响驾驶员视线,BCM会在3次结束后等待2s再刮动一次。
6)Park信号处理
刮片停止位回馈Park信号对于BCM控制刮水功能很重要,因此BCM对于Park信号需要实时采集,并且能够快速辨识出有效Park信号,一般要求Park信号滤波时间不超过30ms。如果BCM超过20s都没有采集到有效Park信号,认为Park信号丢失,在刮水开关断开模式下需要断开刮水输出。
3 刮水控制功能的测试与验证
刮水控制功能的验证主要分为台架测试和实车测试。
3.1 台架测试
在模拟台上面提供了模拟环境,如刮水执行机构、可调电源、网络模拟节点和整车电气系统。主要完成以下测试项目。
1)电气接口测试
测试刮水开关、刮水执行机构与BCM之间的电气接口信号,它们的电平、频率是否符合设计要求,并且分别测试9V、13.5V和16V电源状态下的数据。
2)功能逻辑测试
根据功能逻辑要求,通过台架模拟不同输入状态,同时监控BCM输出是否符合功能逻辑要求。在开始测试前先要根据功能逻辑要求整理出测试CASE,如表3所示。
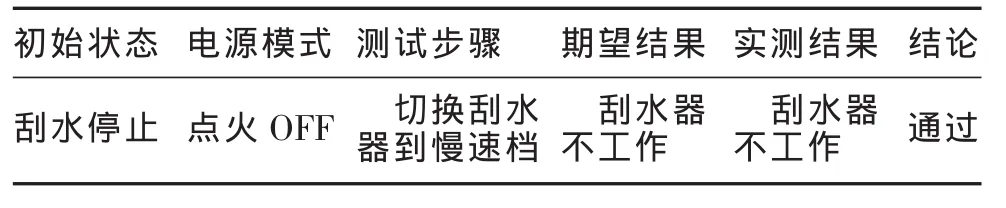
表3 测试CASE示例
在软件开发锁定状态后,测试工程师根据测试CASE表完成每项功能测试,最终给出测试结果。
3.2 实车测试
在样车上将开发好的BCM装上就可进行实际跑车测试,模拟驾驶员实际使用情况测试刮水器的各个工作模式,均能正常实现。
4 总结
本文介绍的BCM集成刮水控制系统是一个低成本成熟的控制系统,已经在多款国内自主品牌车型上成功使用,如上海汽车荣威350、MG3、北汽E系列等自主品牌车型。
[1] 高光飞.单片机课程设计实例指导[M].北京:北京航空航天大学出版社,2004:300-400.
[2] 邱阿瑞.电机与电力拖动[M].北京:电子工业出版社,2002:125-128.
[3] 张洪润,张亚凡.单片机原理及运用[M].北京:清华大学出版社,2004:5-100.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
三悦文摘·教育学刊(2021年52期)2021-04-27
安徽农学通报(2020年16期)2020-10-30
水能经济(2018年11期)2018-10-19
热带农业科学(2018年4期)2018-09-26
探测与控制学报(2018年4期)2018-09-11
汽车电器(2018年1期)2018-06-05
现代农业科技(2017年4期)2017-04-10
