
基于ADAMS人体下肢建模关节力的计算
——兼与测力台比较
2015-02-26 10:15张彦龙陈民盛
天津体育学院学报 2015年2期
张彦龙,陈民盛
●研究报道 Short Comunications
基于ADAMS人体下肢建模关节力的计算
——兼与测力台比较
张彦龙1,陈民盛2
目的:人体多刚体系统动力学的核心问题是人体运动的建模和求解,目前在利用动力学方法建立方程时,经常出现理论分析的结论与实验测试结果相差甚远的问题。通过对仿真计算结果与试验中测得的GRF(地面支撑力)与Ariel软件解析计算出膝关节胫骨平台力的结果进行比较验证,以期探讨人体多环节肌肉力和关节力的简便获取方法及应用优势。方法:高速摄像和三维解析方法,对1个步态周期完整动作与三维测力台同步采集,获得运动学参数和GRF,利用ADAMS三维软件建模对人体下肢运动进行运动仿真,依据运动学测试参数计算出下肢关节的动力学数据,并将仿真结果与试验中测得的GRF、膝关节胫骨平台力进行比较验证。结果:ADAMS计算的仿真力与三维测力台测得的力相关性(P<0.01)达到非常显著的水平,ADAMS仿真计算的3个方向力值95%置信区间与三维测力台力值置信区间几乎一致;Ariel三维解析计算右膝关节力曲线没有表现出膝关节胫骨平台力曲线的特点,曲线不光滑。结论:基于ADAMS进行运动仿真可有效解决求解复杂的多刚体系统动力学参数的精度问题;ADAMS仿真模拟日常行为活动,基于人机功效学的产品优化设计,全膝关节置换仿真研究,各种碰撞研究具有极大优势。
ADAMS;三维建模;运动仿真;关节力计算
人体动力学机制研究作为揭示人体运动形式变化原因的有效方法之一,被实验科学界广为使用。自20世纪60年代以来,已经发展建立了如牛顿-欧拉法(Newton-Euler)、拉格朗日法(Lagrange)、凯恩法(Kane)和罗伯逊-维登伯格法(Roberson-Witten burg)等多种刚体系统数学模型,并引入人体研究领域。该类方法的主要出发点是依据逆动力学方法,通过测得运动学参数,推算动力学结果。由于需要引入伪速度、广义主动力等概念,物理意义较难理解,并且,目前在利用动力学方法建立方程时,多数情况下会出现理论分析结果与试验测试结果相差甚远的问题,且工作量繁琐[1-2]。
G.L.DAVID和K.ΜANAL等[3-4]通过建立神经兴奋与肌肉活动之间的联系,根据肌肉中肌电信号的变化,对肌肉的施力状况进行分析,借助肌电反映出的肌肉激活状态,判断运动中主要参与工作的肌肉数量。但用肌电来判断肌肉力量只能采用定性的比较,而且不能判断肌肉的工作性质,并且该方法目前还受实验技术和测试仪器精度的限制,以及对肌电信号丰富内涵理解程度的限制,尚不能给出较为公认的结果[5]。此外,严波涛[6]提出了骨骼—肌肉—神经系统综合模型计算肌肉力、关节力的方法。该方法以神经系统激活函数,模拟神经信号的传递与反馈、肌肉的舒张和收缩、骨骼的空间运动,并进行一定程度的数学描述。但是该方法研究人体运动时,推导计算比较复杂,肌肉本体模型的根本弱点在于模型中各元素间应力与应变关系的分配是人为确定,而且通过实验确定的各元素的性质实际上依赖于在模型设计中一些较任意的假设。因此,只能说这种方法在性质上属生理手段。
随着系统仿真技术及计算机图形学、数据库技术、虚拟现实技术的交互融合,人体的逼真形象模型在计算机图形学领域迅速发展。虚拟人体及其运动成为当前研究发展的热点,为建模方法与技术的核心理论方面提供了新的研究思路,继而对人体模型的关节中心与实际运动捕捉参数的关节点进行匹配,完成人体模型的建立[7-9]。
ADAΜS(Automatic Dynamic Analysis of Μechanical System)是美国ΜDI公司开发的机械系统动力学分析软件,目前在国际上广为使用。ADAΜS建模的方便之处是可直接调用人体尺寸参数,借助运动学数据求解动力学参数,避免动力学方程推导,仿真更简便、计算速度更快。它可以实现计算机上的复杂运动仿真分析,自动生成任意复杂系统的多刚体动力学数字化虚拟样机模型,具有方便的用户界面、仿真计算能力和强大的建模与模拟环境,为多刚体动力学分析提供一种新的研究路径。
本研究目的是根据多刚体动力学原理,基于ADAΜS模型建立人体下肢关节的六刚体多自由度动力学模型,尝试验证依据运动学数据计算动力学参数,实现运动学逆解的动力学问题的更简便和有效的方法。并将仿真计算结果与试验中测得的GRF(地面支撑力)与Ariel软件解析计算出的膝关节胫骨平台力结果进行比较验证,以期探讨人体多环节肌肉力和关节力的简便获取方法及应用优势。
1 研究对象与方法
1.1 研究对象
1 名健康男子为研究对象,年龄21岁,身高1.81 m,体重69.3 kg。
1.2 研究方法
1.2.1 人体惯性参数的确定 采用GB《中国成年人人体尺寸》国家标准[10]作为人体模型的基本参数(见表1),采用二元回归方程计算个体惯性参数,回归方程为:

式中:B0、B1、B2为回归方程的系数;X1为人体的体重;X2为人体的身高。

表1 下肢(男)二元回归方程系数表Table1 Lower extremity(M)binary regression equation coefficients
将研究对像身高181 cm,体重69.3 kg代入回归方程后确定个体下肢的质量、质心和转动惯量(见表2)。
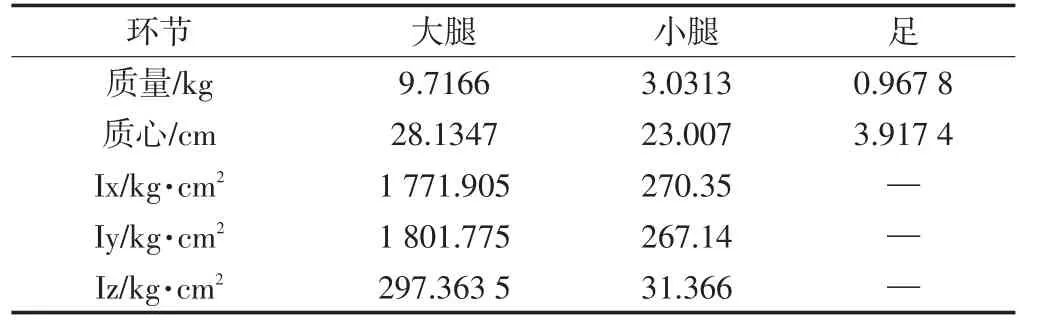
表2 个体下肢(男)惯性参数Table2 Individual lower limb(M)inertial parameters
1.2.2 运动学参数与GRF(地面支撑反力)的测量 2台Quintic GigE高速摄像系统,采样频率为250 Hz,以三维测力台中心的测试跑道为拍摄区域的中心,在距离拍摄区域中心约8 m的纵向与横向分别架设1台高速摄像机,且这2台高速摄像机主光轴成90°。对1个步态周期完整动作重复完成3次试验,并与三维测力台同步采集,获得运动学参数和GRF。身体标定点(Μarker)采用Helen Hayes(Davis)Μarker Placement(海伦·海斯)坐标进行标定,下肢共15个点(见图1)。美国Ariel运动分析系统进行图像解析,Ariel标定下肢点时,有髋关节点,所以Μarker点共解析出17个人体Μarker点的运动学参数。
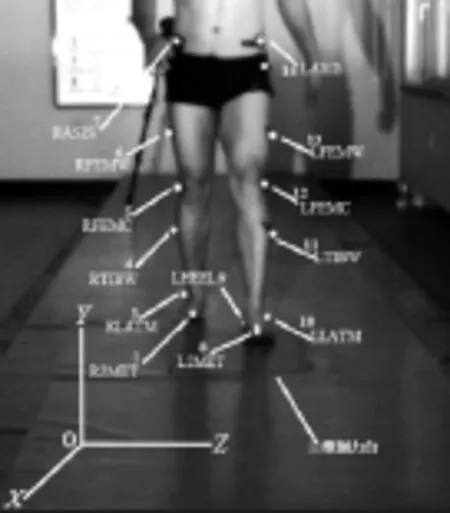
图1 身体标定点(Marker)Figure1 Physical calibration point(Marker)
解析行走动作的运动学参数,有空间参数与时空参数。空间参数(海伦·海斯坐标)步态周期空间位置坐标(关节点空间位置坐标为ADAΜS建模提供参数),解析出行走时的空间参数图见图2;时空参数表征小腿在X、Y、Z轴运动状态的变化情况的角加速度(提供Ariel计算膝关节运动过程中胫骨平台所受到力的数据)。

图2 Ariel解析行走动作棍图Figure2 Ariel resolve the walking motion stick diagram
ADAΜS建立人体模型的基本方法可以归纳为以下2种:(1)使用专业的CAD软件,如三维软件SolidWorks等建立人体模型之后,再导入ADAΜS中;(2)利用ADAΜS自有的建模功能直接建立人体模型。本研究利用ADAΜS二次开发模块LIFEΜOD,其带有人体模型功能,包括模型尺寸GeBOD(Generator of Body Data)库。本研究采用个性化建立人体个体模型,根据研究的实际情况以中国成年男性二元回归方程系数,计算个体惯性参数(见表2),对GeBOD提供的参数进行环节惯性参数个性化修改。根据研究的实际情况简化模型,省略创建躯干与上肢模型,创建人体个体下肢(lower limb)模型。
2 创建人体运动模型
ADAΜS采用6个笛卡尔广义坐标描述一个刚体的位形,利用其质心的三个直角坐标x、y、z确定位置,地面坐标系(Ground Coordinate System)又称为静坐标系或全局坐标系,是固定在地面标架上的坐标系[11]。ADAΜS中,所有构件的位置、方向和速度都用全局坐标系表示。方向遵循右手定则,固定坐标系确定以屏幕参照,即Y轴竖直向上,Z轴垂直屏幕向外,X轴取Z×Y,笛卡尔广义坐标完全描述系统内各个刚体的位形。局部环节参考坐标系(Local Part Reference Frame,LPRF)又称局部坐标,这个坐标系固定在环节上并随环节运动。ADAΜS用刚体Bi的质心笛卡尔坐标和反映刚体方位的欧拉角作为广义坐标,即qi=[x,y,z,ψ,θ,ϕ]T,q=[,,…,]T。
ADAΜS/LIFEΜOD模型的驱动是按着运动学空间参数标志点(Helen Hayes(Davis)Μarker Placement)编写的,在ADAΜS建模过程中,把这些轨迹样条曲线赋予对应的运动引导点,使运动引导点引导人体模型沿着轨迹样条曲线运动。首先,由Ariel软件解析出运动学空间参数编写*.slf文件,驱动点(ΜARKER_SET)类型为DAVIS(Helen Hayes Μarker Placement),time(时间)0代表模型初始坐标,part(1~15)为驱动点在X轴、Y轴、Z轴随时间变化的空间位置(见表3)。1~15代表人体SACRU(髂后上棘中间点)、RASIS(右髂前上棘)、RFEΜW右(大腿中心点)、RFEΜC(右膝关节点)、RTIBW(右小腿中心点)、RLATΜ(右踝关节点)、RHEEL(右脚跟)、R2ΜET(右脚尖)、LASIS(左髂前上棘)、LFEΜW(左大腿中心点)、LFEΜC(左膝关节点)、LTIBW(左小腿中心点)、LLATΜ(左踝关节点)、LHEEL(左脚跟)和L2ΜET(左脚尖)行走时间内(0~2.51 s)驱动点的运动轨迹,创建人体下肢ADAΜS初始模型见图3。

表3 *.SLf文件初始坐标数据/mmTable3 *.SLf file initial coordinate data/mm

图3 人体下肢ADAMS初始模型Figure3 Human lower initial model ADAMS
运动引导点驱动后,再进行静平衡分析。静平衡分析在高速摄像解析的运动学数据读入并且创建了运动引导点之后执行,作用是将运动引导点的弹性势能减小到最小,或者是减小试验中的运动标记点与人体模型上的运动引导点之间的误差。平衡分析过程使运动引导点固定在初始位置上,更新模型的姿势和位置。模型被驱动最后,在ADAΜS软件中对指定轨迹进行运动仿真,完成逆运动学的求解。
经过以上步骤创建完成人体下肢的模型后,ADAΜS/ LIFEΜOD可以自动调用ADAΜS/Solver进行仿真求解[12]。本文以步态行走为例,仿真人体在行走时的运动过程,并进行受力分析。仿真参数设置Dyanmic,仿真时间设为2.50 s,仿真步设为250步,在ADAΜS/Post Precessor(后处理模块)中输出仿真结果,至此通过运动学参数进行动力学仿真分析完成(见图4~图6)。
3 模型的预测性能检验
为了验证ADAΜS仿真结果数据是否符合实际人体运动的生物力学参数,本研究采用测力台实测得到的GRF(地面支撑反力)曲线与ADAΜS仿真结果计算曲线比较的方法进行验证。ADAΜS仿真模拟右足1个步态周期支撑阶段GRF与测力台实测的右足1个步态周期支撑阶段X、Y、Z方向GRF曲线见图7。

图4 后处理模块行步仿真Figure4 Simulation post-processing module walking
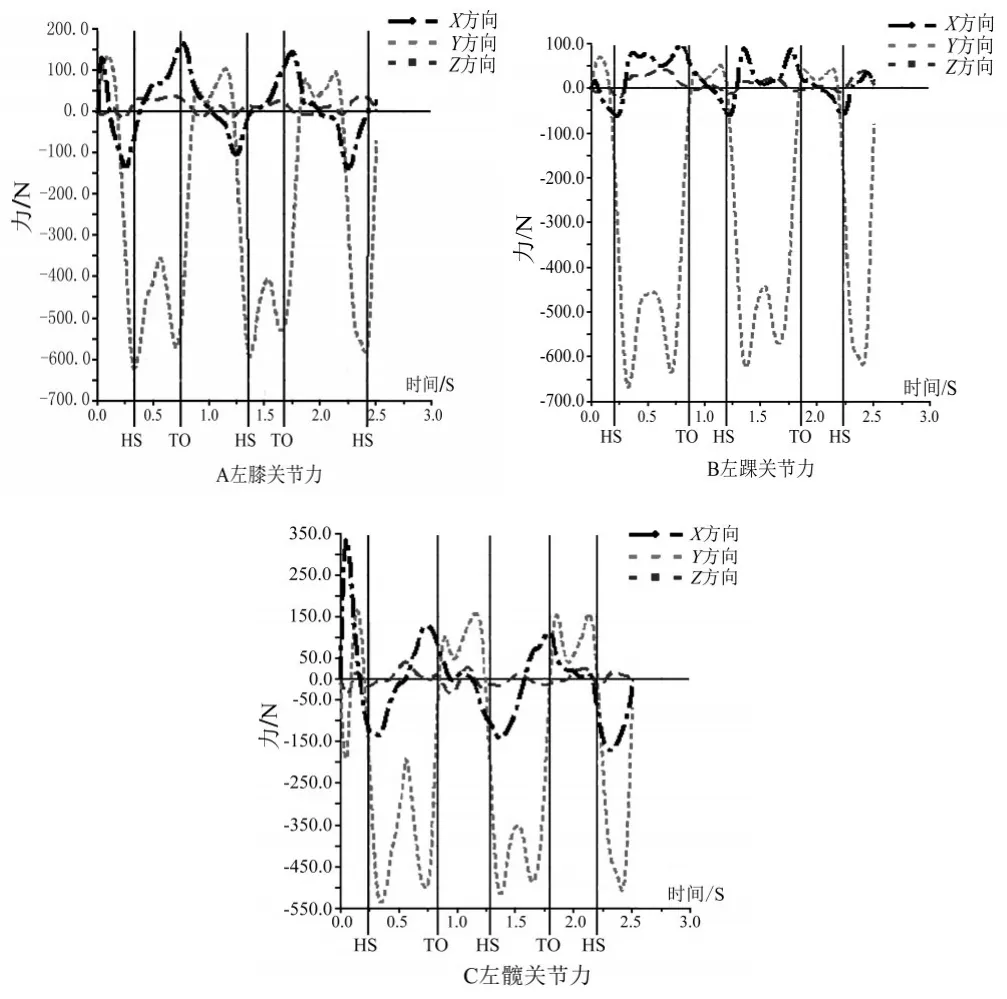
图5 关节力曲线图Figure 5 Joint force graph
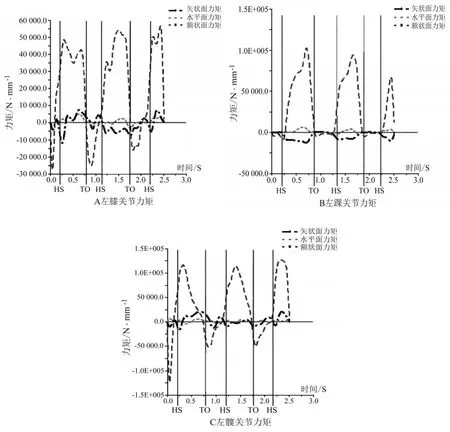
图6 关节力矩曲线图Figure6 Joint torque graph

图7 ADAMS与测力台测得的GRF曲线Figure7 ADAMS and force plate measured GRF curve
对于ADAΜS仿真计算力与测力台测得的力曲线相比较,采用统计学复相关系数的方法作为评价指标,对各曲线之间的相似程度进行描述,先求出相关系数后再进行效果检验。其复相关系数表达式为[13-14]:
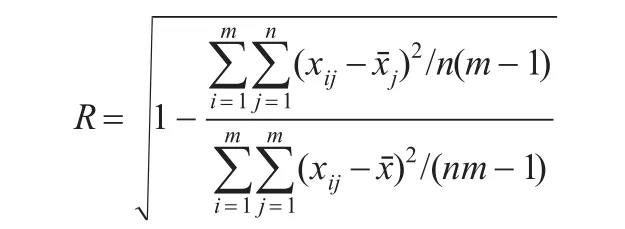
式中:m为曲线的条数;n为每条曲线中含有数据个数;xij为i条曲线的第j个值;为m条曲线的第i个数据平均值;是m曲线n个数据的总体均值。复相关系数R越接近1,表明二者相关性越高,反之降低。
通过运用统计软件求得ADAΜS计算力值,与测力台测得的GRF计算力3个方向的力值复相关系数介于0.5~1之间,并进行效果检验P<0.01,说明本例研究的ADAΜS计算的力曲线与三维测力台测得的力曲线相关程度达到了非常显著的水平(见表4)。

表4 ADAMS计算与三维测力台GRF复相关分析Table4 ADAMS GRF multiple correlation analysis to calculate the three-dimensional force platform
采用统计学的置信区间估计方法对ADAΜS仿真与三维测力台测得的力的精度进行比较。因为,ADAΜS仿真结果数据存在抽样误差,三维测力台同样存在抽样误差,为了区别抽样误差大小,可以采用统计学参数区间估计的方法确定参数值的可能性范围。置信概率取95%,置信区间95%的可能性x的值在ˉ±1.96sxˉ范围,如果误差愈小,那么置信区间愈小,参数估计的精度愈高。ADAΜS仿真计算的3个方向的力值95%置信区间与三维测力台几乎一致(见表5)。由此说明,动力学建模方法的仿真结果与检测结果基本吻合。从而可以证明ADAΜS所建模型正确,符合力学原理。
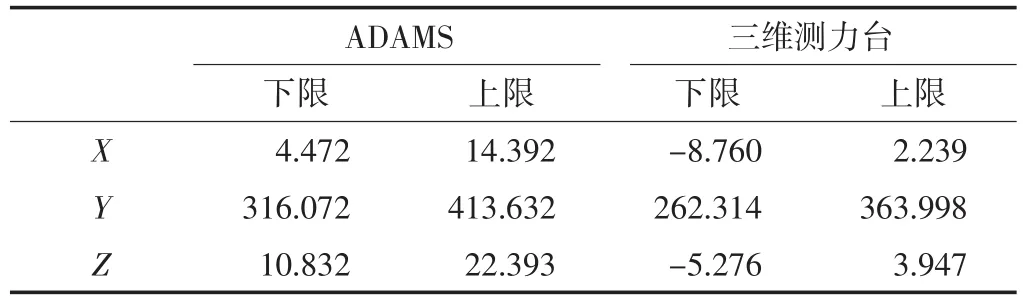
表5 ADAMS计算与Ariel解析计算力值95%置信区间(N=105)Table5 ADAMS computing and analytical calculation ariel force value 95%Confidence Interval(N=105)
目前,由于关节间力的动力学参数非创伤的方式很难完成,只能采用间接的方法计算,为了比较关节力,本研究采用Ariel三维影像解析计算力值与ADAΜS计算力值进行比较。根据计算方法[15-16],由Ariel三维解析的角加速度,由转动定律M=Iβ,F=Iβ/a(I为膝关节绕冠状轴转动的转动惯量;M为力矩;β为角加速度;a为力作用线到关节运动瞬时中心距离)计算右膝关节在Y轴运动过程中胫骨平台所受到力的数据曲线(见图8)。表明,Ariel三维解析计算右膝关节力曲线没有表现出力膝关节胫骨平台力曲线的特点,曲线不光滑。说明,ADAΜS计算的精度高,Ariel三维影像解析计算力误差很大。
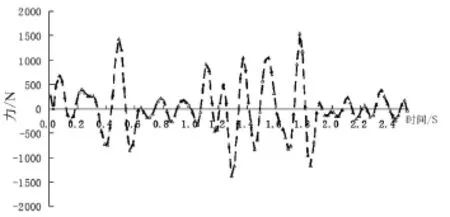
图8 Ariel三维解析计算右膝关节Y轴力值曲线Figure8 Ariel dimensional analytic calculation right knee Y-axis force value curve
由三维摄像解析的运动学参数计算的力的精度为什么不高?也就是说,计算的力值误差过大。原因是,三维影像解析计算力值首先求得角加速度,角加速度是角速度对时间的一阶导数或角度对时间的二阶导数。在运动影像解析中,进行运动学参数的计算时并没有采用导数的算法,而是近似地采用差商的计算来替代导数的计算,导致误差较大。
4 讨论
4.1 ADAMS人体建模关节力计算的可行性
从上述研究结果可知,由ADAΜS计算的力曲线与三维测力台的相关程度达到了非常显著的水平(P<0.01)。不论从进行运动学仿真(速度、角度、位移)还是从动力学仿真(力、力矩)而言,ADAΜS人体建模方法的仿真结果与检测结果吻合度高,表明ADAΜS建模具有可行性。本测试结果(与Ariel三维影像解析计算力值比较)所提示的测试关节力信息进一步说明,利用运动学方法进行动力学逆解时,克服了以往动力学结论与试验测试结果误差大、理论与实践难以有机结合的难题,突显了ADAΜS人体建模的实用价值。而且,此法与传统方法相比能减少运算过程,克服以往计算方法误差大的弊端,提高仿真精度。已有学者[17-18]应用肌肉力学公式在ADAΜS建模,借助于软件功能强大的积分器求解矩阵方程,缓解繁琐的公式推导计算过程,降低运算过程[19]。由此充分说明,ADAΜS人体建模对关节力计算的可行性与可靠性。
4.2 ADAMS人体建模方法所能解决的特殊领域的实践问题
4.2.1 应用ADAMS仿真模拟日常行为活动,建成标准的应用骨-肌系统的个性人体动态仿真 ADAΜS/LifeΜOD不仅能做行走的力-时间、力矩-时间分析,还能自动生成标准力、位移、速度、加速度、扭矩和角度参数。这说明,利用ADAΜS/LifeΜOD仿真模拟日常行为过程中肌肉、骨骼的力学机制,能预测非现实的人体运动,进而更细致地了解人体动作背后的力学特性以及动作技能控制规律,并利用规律性认识解决现实中的难题。如国外仿真模拟了人的仰卧侧睡,计算出靠背角度对深部肌肉的影响,获得脊柱应力曲线变化,分析床垫对脊柱健康的影响[20];建立生物力学人体升降机和电梯操作员动态模拟模型,评估人防坠落系统对人体潜在的伤害[21];通过外科医生的手势肌肉骨骼模型,提供生物力学参数,对手术操作进行肌肉收缩的动力学分析,从而提供外科新手术器械(包括外科手术机器人仪器)设计的参数[22]。对这些热点、难点问题的研究,充分表明了ADAΜS/LifeΜOD建立仿真的必要性与实用性。
4.2.2 ADAMS在整形生物力学、康复生物力学中的应用优势 上述仿真突出特征是三维视图,体现了力-时间、力矩-时间关系图表窗口与仿真模型同一视窗同步分析。利用ADAΜS/ LifeΜOD能创建模型清晰、简明和完整的三维动画场景、图表,建立仿真股骨头置换、全膝关节置换,研究理想关节模型、植入部位修正、内植物替换、脊椎肌肉对椎间盘的应力影响等,分析临床外科手术关节置换术对人体骨肌系统运动及动力学的影响。ADAΜS/LifeΜOD以其功能强大的后处理能力彰显了它在整形生物力学、康复生物力学中的应用优势,尤其是整形外科可植入物的大小、材料的刚度、弹性等力学参数的不易预测性,一半的人工全膝关节置换术(TKA)由于不稳定、错位或内固定而失败。而ADAΜS/LifeΜOD插件模块KneeSIΜ是专门建立膝关节仿真模型,该模型动态研究人体膝关节的力学特性,实现植入定位的个性化方式,帮助医生预测个体植入物的运动学序列变化,以评估磨损问题。还有学者分析全膝关节置换术失败的各种原因[23]和全髋关节植入物设计的研究[24]。这些研究对整形外科医生更好地验证关节置换术的结果和重新设计大有裨益。国外学者甚至利用ADAΜS/LifeΜOD多体脊柱肌肉骨骼模型的特殊性,建立生物仿真离散多体脊柱模型,测量并分析各种活动时椎间盘的内压力[25],进行人体工程学轮椅设计,帮助医生检查脊椎运动行为并提出可行的脊椎矫正手术。
由此可见,ADAΜS在材料各种参数和几何形状设计以及外科放置上,在确保设计的精确性上,相对其他建模工具有极大的应用特殊性。
4.2.3 复杂模型与接口上的极大优势 在体育领域,利用ADAΜS/LifeΜOD的个性化建模和强大的计算能力,任何动作捕捉设备提供的运动学参数都可以进行运动仿真,可以将运动员的比赛和训练情况进行再现并分析运动学、动力学特征,优化运动员技术,进而达到指导运动训练的目的。本研究虽仅对一个人行走模型进行了验证,但更值得关注的是,ADAΜS/ LifeΜOD能克服其他建模只能对单个对象进行仿真的局限,实现复杂模型共存(6个人体模型共存),且快速生成完整的骨骼/皮肤/肌肉人体模型,以骨骼、女性皮肤、男性皮肤、碰撞假人模型、椭球体模型和棍图等多种形式展现。
本研究虽仅使用高速摄像解析运动学参数进行仿真,但软件能与动作捕捉设备生成的标准ASCII导入仿真。ADAΜS/ LifeΜOD的极大优势还在于模型能够与环境、器械以及彼此间相互作用完成动作,其工业级的仿真技术接口的可扩展性极强,包括CATIA、PRO/E、SolidWorks和UG等三维机械设计软件模型紧密结合,并且它还可轻松导入由ΜRI和CT扫描的工程格式数据。有学者基于人机功效学的产品优化设计,模拟人与外部环境的交互来提高汽车内部设备舒适性[26],在机舱模拟飞行员操作的能力[27],轮椅乘员在正面和侧面碰撞分析颈椎损伤[28]。说明,ADAΜS强大的后接口能力使创建刚体模型简单,并帮助工程师轻松地将复杂构件与人体模型进行仿真,此优势决定了ADAΜS将有更广阔的应用空间。
5 结 论
(1)ADAΜS计算的力曲线与三维测力台的GRF曲线之间的相似程度达到了显著水平,说明建立的环节人体模型是可行和合理的。(2)运用运动学和动力学仿真分析软件ADAΜS仿真得到关节的作用力,作用力在700 N以内,与关节的实际运动情况符合。与Ariel三维解析的力曲线之间的精度比较说明,ADAΜS计算的精度高,是目前定量分析关节间力较好的方法。(3)基于ADAΜS进行运动仿真,提高了求解速度,保证求解精度对于人体运动过程中关节力的逆运动学求解,可以方便地进行运动学逆解的求解,避免通常运动学逆解解析计算的复杂运算。(4)ADAΜS仿真模拟日常行为活动,基于人机功效学的产品优化设计,全膝关节置换仿真研究,各种碰撞研究具有极大优势。
[1]朱昌义.单杠上人体摆动的凯恩动力学模型[J].成都体育学院学报,2000,26(6):71-74.
[2]刘延柱.单杠振浪的力学特征[J].体育科学,1987,7(2):57-60.
[3]LLOYD D G,BESIER T F.An EMG-driven musculoskeletal model to estimate muscle Forces and knee joint moments in vivo[J].Journal of Biomechanics,2003,36(6):765-776.
[4]MANAL K,BUCHANAN T S.A one-Parameter neural activation to muscle activation model:estimating isometric joint moments from electromyograms[J].Journal of Biomechanics,2003,36(8):1197-1202.
[5]施宝兴,魏文仪.逆向动力学计算方法及提高计算精度的探讨[J].南京体育学院学报:自然科版,2003,2(2):6-7.
[6]严波涛.人体肌肉工作的运动生物力学测量和评价[J].西安体育学院学报,1992,9(1):62-64.
[7]MAYERS L,BRONNER S,AGRAHARASAMAKULAM S,et al.Lower Extremity Kinetics in Tap Dance[J].Journal of Dance Medicine&Science,2010,1(14):3-8.
[8]HELLER M O,BERGMANN G,DEURETZBACHER G,et al.Musculo-skeletal loading conditions at the hip during walking and stair climbing[J].Journal of Biomechanics,2001,34:883-893.
[9]SHELBURNE K B,PANDY M G.A dynamic model of the knee and lower limb for simulating rising Movements[J].Comput Methods Biomech Biomed Engin,2002,5(2):149-159.
[10]郑秀媛.现代运动生物力学[M].北京:国防工业出版社,2002:106.
[11]陈立平,张云清,任卫群,等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[12]袁清.人体上肢运动学动力学建模与仿真技术的研究[J].计算力学学报,2010,27(2):321-322.
[13]KADABA M P,RAMAKRISHNAN H K,WOOTTEN M E,et al.Repeatability of kinematic,kinetic,and electromyographic data in normal adult gait[J].Orthop Res,1989,7(6):849-860.
[14]李旭鸿,郝卫亚.基于LifeMod对跳马过程中体操运动员-落地垫动力学关系的计算机仿真[J].体育科学,2013,33(3):81-87.
[15]FRANKEL V.BURSTEIN A H.Orthopaedic Biomechanics[M].Philadelphia:Lea&Febiger,1970.
[16]NARDIN M,FRANKEL V H.肌肉骨骼系统基础生物力学[M].邝适存,郭霞,译.北京:人民卫生出版社,2008:125-126.
[17]宋红芳,张绪树,史俊芳,等.人体上肢的ADAMS建模及仿真[J].医用生物力学,2002,17(4):240-241.
[18]刘健,郑建荣,吴青.基于ADAMS的人体膝关节运动力学研究[J].计算机应用与软件,2012,29(6):202-203.
[19]程秋菊.基于ADAMS的人体下肢运动仿真[D].哈尔滨:哈尔滨工程大学,2008.
[20]LEILNAHARI K,MASSERR F,MAHMOUD K,et al.Spine alignment in men during lateral sleep position:experimental study and modeling [J].Biomed Eng Online,2011,10:103.
[21]PAN C S,POWERS J R,HARTSELL J J,et al.Assessment of fall-arrest systems for scissor lift operators:computer modeling and manikin drop testing[J].Hum Factors,2012,54(3):358-372.
[22]CAVALLO F I,PIETRABISSA A,MEGALI G,et al.Proficiency assessment of gesture analysis in laparoscopy by means of the surgeon's musculo-skeleton model[J].Ann Surg,2012,255(2):394-398.
[23]MIHALKO W M,CONNER D J,BENNER R,et al.How Does TKA Kinematics Vary With Transverse Plane Alignment Changes in a Contemporary Implant[J].Clin Orthop Relat Res,2012,470(1):186-192.
[24]REILLY D S O,DONOGHUE M F.Finding Hip Forces in Healthy and Hip Replacement Subjects Using Musculo-Skeletal Modeling[J].IFMBE Proceedings,2010,25(4):2231-2233.
[25]HUYNH K T,GIBSON I,JAGDISH B N,et al.Development and validation of a discretised multi-body spine model in LifeMOD for biodynamic behaviour simulation[J].Comput.Methods Biomech Biomed Engin,2015,18(2):175-184.
[26]KIM S H,LEE K.Development Of Discomfort Evaluation Method For Car Ingress Motion[J].International Journal of Automotive Technology,2009,10(5):619-627.
[27]XUE H,ZHANG X Y.Simulation for Pilot's Capability of Target-Pointing Operation[J].HCI International,2013,374:347-351.
[28]KIM M K,YANG I C,LEE M P.Cervical Spine Injury Analysis regarding Frontal and Side Impacts of Wheelchair Occupant in Vehicle by Lifemod[J].IFMBE Proceedings,2007,14:2521-2524.
Calculation of the Human Lower Limb Joint Force Based on ADAMS Modeling:Compared with the Force Plat⁃form
ZHANG Yanlong1,CHEN Minsheng2
(1.School of PE,Mudanjiang Normal University,Mudanjiang 157011,China;2.Dept.of PE,Teachers College,Shenzhen University,Shenzhen 518060,China)
Objective:The core issue of human multi-body system dynamics modeling of human body movement and solving equations currently in use when creating dynamics,often concludes with the experimental results of the theoretical analysis of the problem far.Acquisition and application by a simple simulation results and experimental measured GRF(ground support force)with the results of Ariel software analytical calculation of the knee tibia plateau force is compared verified in order to explore the human body many aspects of muscle strength and joint forces advantage.Methods:High-speed camera and three-dimensional analytical method,a gait cycle complete action and force platform synchronous acquisition,obtain kinematics parameters and GRF,the use of three-dimensional software modeling ADAMS human lower limb motion simulation,kinematics test parameters on the basis of calculate the dynamics data of lower extremity joints,and the simulation results and experimental GRF measured knee tibia plateau force validation purposes.Results:ADAMS simulation computing power and force platform measured force correlation(P<0.01)reached a very significant level,three directions ADAMS simulation of the force value of 95%confidence interval and force platform Force almost the same value of the confidence interval;Ariel dimensional analytic calculation power curve right knee showed no knee tibia plateau force curve characteristic curve is not smooth.Conclusions:Based on ADAMS motion simulation can solve the solve the complex multi-body dynamics parameters of accuracy problems;ADAMS simulation activities of daily behavior,based on the science of ergonomics to optimize product design,simulation,total knee replacement,a variety of collision research has a great advantage.
ADAMS;3D modeling;motion simulation;joint force calculation
G 804.6
:A
:1005-0000(2015)02-169-06
10.13297/j.cnki.issn1005-0000.2015.02.015
2014-12-02;
2015-02-22;录用日期:2015-02-23
黑龙江省高等学校教改工程项目(项目编号:JG2014011051);牡丹江市社会科学课题项目(项目编号:201223);牡丹江师范学院人文社会科学研究项目(项目编号:G201305)
张彦龙(1975-),男,黑龙江绥化人,讲师,研究方向为运动生物力学。
1.牡丹江师范学院体育科学学院,黑龙江牡丹江157011;2.深圳大学师范学院体育系,广东深圳518060。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
黑龙江大学自然科学学报(2022年1期)2022-03-29
中老年保健(2021年10期)2021-08-24
保健医苑(2021年7期)2021-08-13
电子制作(2019年15期)2019-08-27
中国体育教练员(2018年2期)2018-07-23
运动精品(2017年3期)2018-01-31
中学物理·高中(2016年8期)2016-08-08
