高精度送料装置控制系统的设计
2015-02-24 07:38郭北涛赵呈龙
机床与液压 2015年22期
郭北涛,赵呈龙
(沈阳化工大学机械工程学院,辽宁沈阳 110142)
随着技术的进步,工业生产线对其送料装置提出了越来越高的要求,如应满足送料的高精度和高效率。文中所设计的基于运动控制卡和PC机的控制方式充分发挥了伺服系统控制精度高、响应速度快和运行平稳等优点,有效地提高了送料的精度和效率,满足了生产厂家的控制要求[1]。
1 送料装置结构设计
送料装置包括机械部分、控制部分、动力源、检测部分和执行元件,主要由伺服电机、滚珠丝杠、直线导轨和光栅尺等组成。简化的送料装置机械结构简图如图1 所示[2]。

图1 送料装置机械结构简图
在控制系统的设计方案中,PC机和运动控制卡构成主从式控制结构,图2为基于运动控制卡搭建的送料装置控制系统硬件结构图。在基于运动控制卡的送料系统控制方案中,PC机作为控制系统的中心部分,可以专注于人机界面、实时监控和发送指令等系统管理工作;运动控制卡负责处理所有运动控制的细节,如升降速计算和行程控制等,且无需占用PC机资源。运动控制卡还提供了功能强大的运动控制软件库如C语言运动库、Windows DLL动态链接库等,让用户更快、更有效地解决复杂的运动控制问题[3]。
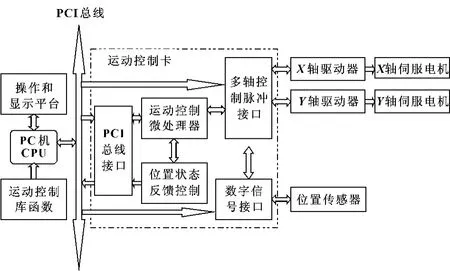
图2 送料装置控制系统硬件结构
运动控制卡以PCI插卡形式嵌入PC机中,将PC机的信息处理能力和运动控制能力有机地结合到一起,具有开放性程度高、使用简便、功能丰富、实时调整优点突出、运动控制轨迹准确、通用性好和可靠性高的优点。运动控制函数库为单轴及多轴的伺服或伺服控制提供了许多运动函数,如单轴运动、多轴独立运动、多轴插补运动等。另外,为了配合运动控制系统的开发,还提供了以下辅助函数,如中断处理、编码器反馈、间隙补偿,运动中变速等[4]。
运动控制卡嵌入到PC机中,其本身不能直接与普通的二四相、或三六相伺服电机连接,必须要有伺服电机细分驱动器作为功率级、相序发生单元。伺服电机细分驱动器的选型与伺服电机相关,比如电机的相数和工作电压、电流等。通过PC上的人机交互界面设置系统的运动控制参数,软件控制运动控制卡发送出脱机、方向速度脉冲给伺服电机细分驱动器控制伺服电机转动。该系统采用Panasonic伺服驱动器,该驱动器有速度控制模式和位置控制模式,可以接收差分和光耦输入,并有伺服报警、定位完成、速度到达、转矩限制和速度限制等伺服电机控制的反馈信号[5]。
2 软件设计
为满足精确定位和大负荷平稳运行等要求,与伺服电机直接相连的增量式码盘用于速度反馈;安装在工作台上的直线光栅尺用于测量位置信号。对工作台的位移进行实时采集测量并反馈到运动控制卡上进行闭环控制。相比于开环和半闭环控,制能部分消除丝杠的加工误差和随丝杠磨损出现的误差,精度、速度及动态特性均有一定的优越性[6]。
电机的运动控制是整个控制系统的核心,其流程如图3所示。首先启动系统,并进行系统初始化和设置相应的运行参数;其次,根据位置传感器传送的信号由上位机经过判断和运算,发出指令给运动控制卡;运动控制卡发送出脉冲信号给伺服电机细分驱动器继而控制伺服电机转动,从而实现电机的运动控制[7]。

图3 伺服电机控制流程图
系统采用研华PCI-1240二轴运动控制卡,该卡提供了功能强大的Windows DLL动态链接库程序。在运动函数库中所使用到的函数主要有如下几种:控制卡及轴设置函数,独立运动和插补运动函数,制动函数,位置和状态设置及查询函数,I/O口操作函数,错误代码函数。Visual C++6.0作为开发工具,利用PCI1240运动控制卡的Windows驱动程序以及API运动函数库,实现PC机与运动控制卡的实时通信,可以高效地开发出运动控制系统软件[8]。图4为所开发的送料装置软件操作界面。

图4 软件操作界面
3 结束语
文中基于控制运动控制卡的送料装置能够实现对工件的精确定位和控制。系统具有硬件组建周期短、精度高、易于维护和实现的优点。通过调用运动函数库使得软件开发周期大为缩短,并且具有良好的人机交互界面,在实际使用中运行良好。该系统可提高送料效率和精度,具有一定的通用性和推广性。
[1]刘晓萌.定长送料系统多轴同步控制[D].杭州:浙江大学,2012.
[2]殷悦,屈百达.模糊神经网络在数控全闭环系统位置控制上的应用[J].机床与液压,2012,40(21):19 -22.
[3]王世红,徐世许,张传林.送料机定长送料的伺服控制系统设计[J].机械工程与自动化,2012(2):152-154.
[4]涂芬芬.基于运动控制卡的多轴机床控制系统[J].南京航空航天大学学报,2012,44(2):146-150.
[5]宋洋,王新,明军.MPC08SP运动控制卡在烟把智能定位系统中的应用[J].计算机技术与发展,2010,20(12):185-188.
[6]廖代海.基于伺服控制的铝型材生产线设计研究[D].长沙:中南大学,2012.
[7]董震,张立新,胡学龙,等.基于运动控制卡的数控试验台设计与仿真[J].农业工程,2012(12):40-42.
[8]潘强,鞠玉涛.步进电机直线定位系统设计及仿真研究[J].计算机仿真,2012,29(9):188 -190.
猜你喜欢
机电工程技术(2022年8期)2022-09-22
电脑爱好者(2020年6期)2020-05-26
科技创新与应用(2019年32期)2019-12-02
电脑与电信(2018年12期)2018-03-23
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
电子制作(2017年23期)2017-02-02
网络安全和信息化(2016年2期)2016-11-26
光学精密工程(2016年5期)2016-11-07
上海电机学院学报(2015年3期)2015-02-28