
MEMS保险机构加载模拟装置
2015-02-24 00:44王彭颖恺李国中
探测与控制学报 2015年6期
王彭颖恺,隋 丽,李国中
(北京理工大学机电动态控制重点实验室,北京 100081)
MEMS保险机构加载模拟装置
王彭颖恺,隋丽,李国中
(北京理工大学机电动态控制重点实验室,北京100081)
0引言
引信安全系统通常采用双环境保险机构,常用的是后坐保险机构和离心保险机构。考核保险机构性能最可靠的方法是靶场射击实验,但该方法实验费用高,尤其是对于高价值弹药,靶场实验的高昂费用越来越难以承受。另一方面,从机构设计,试件生产到靶场实验的周期较长,难以做到对机构修改的即时检测。研究模拟加载实验方法取代或部分取代靶场实验,将会极大推动引信技术的发展。
现有的模拟加载方法主要有冲击加载法和离心加载法。冲击加载法包括跌落加载法、马歇特加载法,以及各种空气炮、火药炮加载方法。冲击加载法产生的冲击加速度可以达到数万g,但其持续时间只有100 μs左右[1]。虽然可以通过改变碰撞目标的材料(如增加不同材质的衬垫),增加持续时间,但其效果有限,持续时间难以达到毫秒级[2]。空气炮、火药炮加载方法实验过程繁琐,费用也偏高。对于离心加载法,可以通过改变离心机的转速和离心半径改或增加助推[3]改变加速度值。但离心机加速慢,加速时间长,基本上是一种静态加载方法,难以模拟所需的加载要求。本文针对上述问题,提出了MEMS保险机构加载模拟装置。
1模拟加载装置的设计
1.1模拟加载装置的结构及作用原理
模拟加载装置是一种具有两自由度的旋转装置,它主要由电机、大旋转板、小旋转板、扭簧、杠杆、启动装置、保护罩等组成,其结构如图1所示(保护罩未画出)。电机带动大旋转板旋转,小旋转板位于大旋转板一端,其转轴平行于电机轴。
大旋转板由电机带动进行高速旋转,产生所需的离心加速度。待测的MEMS保险机构安装在小旋转板上,小旋转板与大旋转板之间装有扭簧,套在小旋转板转轴上,扭簧两臂分别固定在大、小旋转板上。小旋转板克服扭簧力矩旋转一个角度后,杠杆将其固定在这一位置。在此位置,要保证被测的MEMS保险机构的运动方向垂直于大旋转板的旋转半径。启动机构挡住杠杆,使其不能运动。如果不用杠杆而将启动机构直接挡住小旋转板,扭簧的恢复力矩将对启动机构产生很大的摩擦力,启动机构难以可靠启动释放小旋转板。设置杠杆的目的是减小作用在启动机构上的摩擦力。
1.2加速度幅值的控制与结构设计
离心速度的计算公式:
a=R×w2
(1)
式(1)中: a为离心加速度;R为小旋转板的旋转轴心距大旋转板的旋转轴心的旋转半径(偏心距);w为大旋转板的旋转角速度。
由离心加速度计算公式(1)可知,改变偏心距R或者改变旋转角速度ω都可以改变加速度大小。本试验中偏心距R为140 mm,大旋转板转速为3 600 r/min。产生的最大离心加速度约为2 000g。
1.3加速度持续时间的控制与结构设计
在进行加载试验时,小旋转板带动扭簧旋转180°,并用杠杆卡住。当转速达到预期值时,启动装置释放杠杆,在扭簧复原力的作用下小旋转板旋转180°恢复初始状态。在这个旋转过程中,保险机构受到的加速度从0到最大值,再由最大值降至0。
在这一变化过程中,忽略大旋转板的转速及小旋转板的安装位置,小旋转板的转动时间即为加速度的持续时间,它与小旋转板的转动惯量和扭簧的扭矩有关。小旋转板的运动方程为:
目前,各种类型的编码器广泛用于测控、机床、工业机器人及其他许多技术领域。对编码器测量精度和分辨率的要求不断提高,促进了编码器设计技术的改进和发展。本文阐述了编码器的原理和分类,并分析了编码器在机床、自动化控制、新能源开发等领域的应用现状,最后探讨了编码器小型化、智能化的发展趋势。未来,将不断研制出更多的新型编码器,编码器的应用领域将更加广泛,其工作的可靠性和精度也将不断提高。本文对编码器的工作原理以及应用现状等进行具体论述,并对其未来发展趋势进行了展望。
J(d2θ/dt2)=M(θ0-θ)-f(d/2)mRw2
(2)
式(2)中:J为小旋转板(包括被测保险机构和玻璃盖板)的转动惯量;θ为小旋转板的旋转角度;M为扭簧的扭转刚度;θ0为扭簧的预扭角度;f为小旋转板转轴圆柱面摩擦系数;d为小旋转板直径;m为小旋转板的质量(包括被测保险机构和玻璃盖板);R为小旋转板的距大旋转板的旋转轴心的旋转半径(偏心距);w为大旋转板的旋转角速度。
当小旋转板的结构参数和材料确定之后,其质量和转动惯量就可以确定。通过求解上述运动方程(2),可以得到扭簧扭转刚度M与小旋转板旋转时间的关系。根据所需要的转动时间,确定扭簧的扭转刚度M,进而对扭簧进行设计或选择。
在实际试验时,大旋转板转动产生的离心力作用于被测保险机构的运动零件上,当运动零件运动方向与离心力夹角从90°开始变化时,离心力一方面可以推动运动零件的运动;另一方面,其在垂直零件运动方向的分量会对零件的运动产生一个摩擦力阻碍零件的运动。图2,图3分别给出了旋转板位置关系图和放大的小旋转板图。
如图2,图3所示,设小旋转板转轴位置为A,大旋转板转轴位置为B滑块质心为C。小旋转板在旋转过程中某一时刻转过的角度为θ,即AB与AC的夹角为θ,滑块受到的离心力F与AC夹角为α,即AB与AC夹角为α,因为AC≪AB,AC≪BC,可近似认为AB∥BC,∠θ=∠α。

图1 模拟加载装置结构图Fig.1 Structure diagram of loading devices
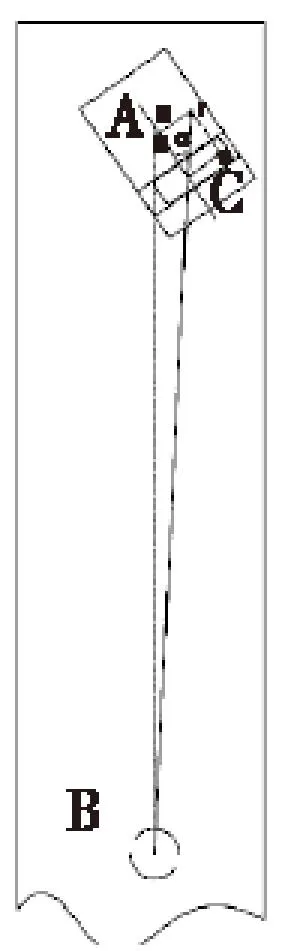
图2旋转板位置关系图
Fig.2Rotating plate location diagram

图3 小旋转板示意图Fig.3 Small rotating board
根据离心力计算公式可以得到滑块在旋转过程中受到的离心力大小为:
F=mrw2
(3)
式(3)中:m为滑块质量;r为滑块旋转半径,变量;w为大旋转板旋转角速度。
由受力分析可以得到滑块受到的主动力Fx和摩擦力Ff计算公式:
Fx=Fsinα=Fsinθ
(4)
Ff=fFy=fFcosα=fFcosθ
(5)
若定义摩擦力与主动力之比为K,即:
K=Ff/Fx=f/tanθ
(6)
当θ不同时,可以列出表1。从表中可以看出:当θ<5.71°时,Fx

表1 K值随θ的变化
根据表1,可以画出图4 。图4给出了不考虑摩擦(以下称为理想情况)和考虑摩擦(以下称为实际情况)两种情况下,滑块所受离心力的对比。图中横坐标θ为小旋转板的旋转角度,纵坐标为滑块所受离心加速度,为直观起见,加速度做了归一化处理,设理想情况滑块所受最大加速度为1。图中实线为理想情况的加速度曲线,虚线为实际情况的加速度曲线。从图中曲线变化趋势可以看到,实际情况的加速度值要小于理想情况的值。通常情况下,后坐保险机构在最大膛压前解除保险,因此只需考虑θ=90°前滑块受力情况。为了减小摩擦力的影响,可以预先给扭簧旋转一个角度(5.71°),这样小旋转板在转动过程中,滑块受力就接近无摩擦的情况,只是离心力达到最大值,小转转版旋转的角度不是90°,而是85°,旋转时间有所减少。对于这一问题,可以通过适当减小扭簧的刚度来增加小旋转板的转动时间。
在进行小旋转板设计时需要注意,要尽量保证其质心位于旋转轴上。若重心偏离转轴,在转动的过程中会产生转矩,从而对被测机构产生附加角加速度,进而影响作用时间。
1.4机构启动的控制与设计
启动装置有两种方案。一种方案是采用导电滑环。导电滑环可以实现从固定位置到旋转位置传送数据或功率。在这种方案中,采用电磁铁作为启动控制装置。初始时使用电磁铁挡住杠杆,当大旋转板转速达到预定转速(即设置的加速度)时,外部电源通过导电滑环给电磁铁供电,驱动其动作释放杠杆,进而释放小旋转板。这种方案的特点是可以通过外部电路控制电磁铁工作,还可以在大旋转板上安装加速度传感器实时检测安保机构所受加速度大小。其不足之处在于当需要较高转速时,导电滑环两部分之间高速摩擦,滑环的工作可靠性难以保证。
第二种方案采用人工手动进行非接触式控制,其结构如图5所示。图中所示定位销上、下部分直径较大,中间有一凹槽。平时,定位销的下部挡住杠杆,使其不能运动。工作时,定位销向下运动,由于定位销中部的凹槽,当其运动到一定位置时,杠杆可以被释放。定位销的运动采用非接触磁力推动方式。具体方案是:在定位销上部固定一块钕铁硼永久磁铁,在防护罩内部与定位销相对应的位置上安装一块体积较大的钕铁硼永久磁铁,两块磁铁相对面的极性相同,当其靠近时,相互之间会产生排斥力。在实验开始时,用防护罩罩在旋转装置上,控制距离使两磁铁之间无相互作用力。当大旋转板的转速达到预定值时,移动装有永久磁铁的防护罩慢慢靠近大旋转板。当两磁铁之间的间隙减小到一定程度时,排斥力就会推动定位销向下运动,从而释放杠杆。启动装置应尽量靠近大旋转板的旋转轴, 减小摩擦力,以便启动装置可靠运动。
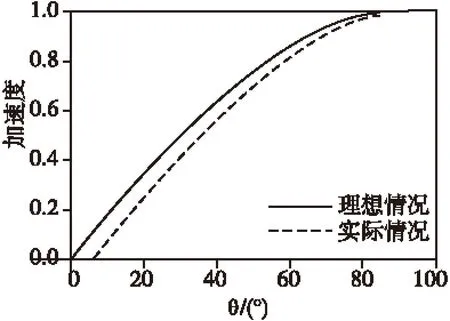
图4 小旋转板示意图Fig.4 The centrifugal force on the slider in two conditions

图5 启动机构结构图Fig.5 Structure of starting devices
2模拟加载装置的性能分析
本文设计的模拟加载装置,其性能目标主要有两个,加速度值和加速度作用时间。试验中的加速度值采取理论计算值约2 000g。加速度作用时间通过静态旋转测试得到,测试电路如图6所示。
静态旋转测试是在大旋转板静止的情况下,测试小旋转板释放后旋转180°停止的时间。测试时在大旋转板旋转终止位置处放置一金属板开关K2,旋转台为节点K,与之接触的杠杆为开关K1。由电路图可知,在小旋转板静止时,K与K1接触,开关K1闭合,电路输出为低电平。当杠杆被释放,小旋转板开始运动,则节点K与K1分离高电平。当小旋转板转动180°后,与K2接触,K2闭合,电路输出低电平。高电平的持续时间即为加速度作用时间。图7所示为示波器记录下的电路输出波形。表2所示为试验测得的作用时间。从表中数据可以看出,随动台的旋转时间稳定在2 ms左右。

图6 加速度过载作用时间测试电路Fig.6 test circuit of theaction time of acceleration
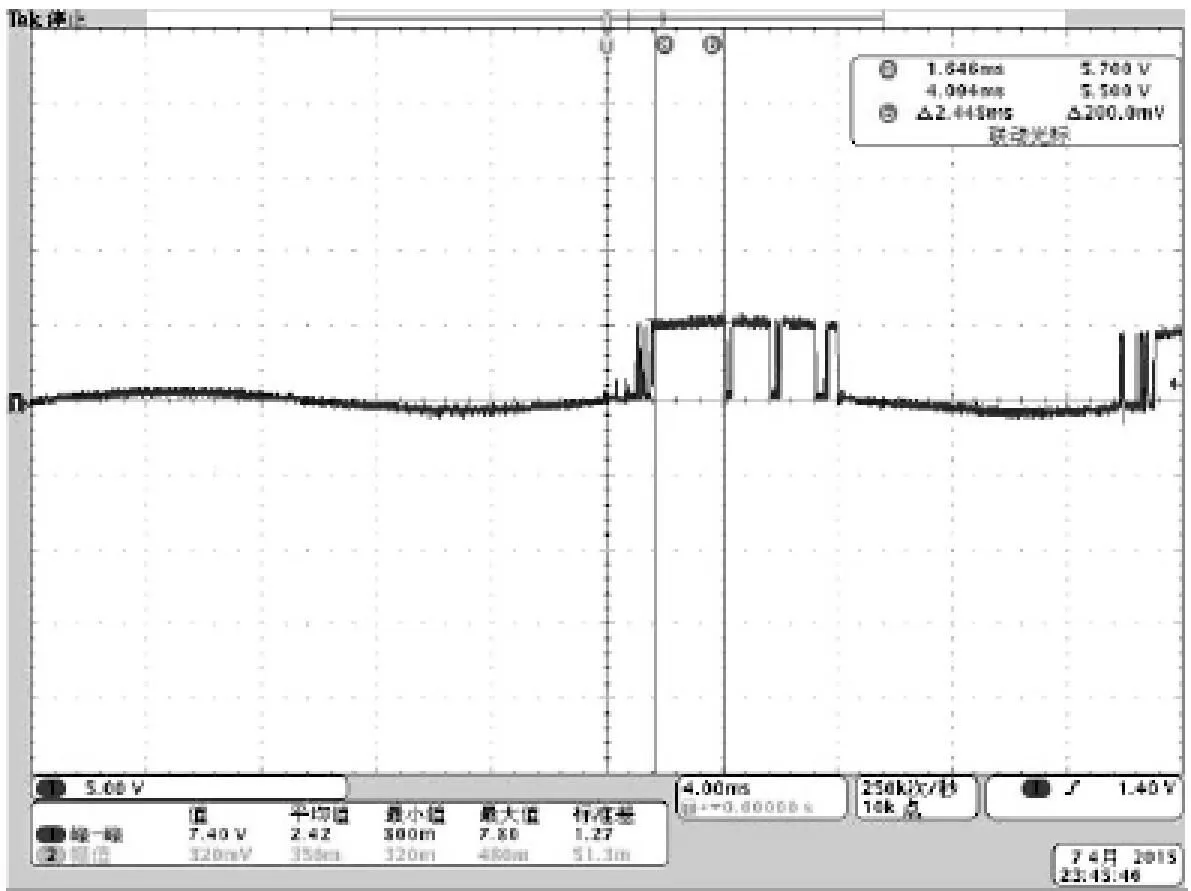
图7 电路输出波形Fig.7 Output oftest circuit
表2转动时间测试结果
Tab.2Test result of rotation time
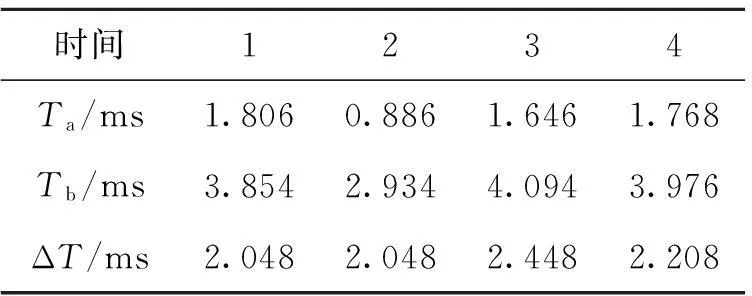
时间1234Ta/ms1.8060.8861.6461.768Tb/ms3.8542.9344.0943.976ΔT/ms2.0482.0482.4482.208
3应用举例
测试装置如图8所示。在试验中要注意,由于大旋转板是高速旋转,为防止在实验过程中有零件飞出伤人的可能,需要使用防护罩,并通过防护罩上的透明盖板观测。
实验过程中测得的旋转板转速约为2 857 r/min,转速满足要求。图9是安保机构实验前的状态,后座保险机构没有被卡销卡住,保险未解除;图10是安保机构实验结束后的状态,后座保险机构被卡住,并且解除对离心保险的约束,解保成功。

图8 测试装置实物图Fig.8 Picture of testing devices

图9 安保机构未解除保险图Fig.9 Safe and arming systembefore test

图10 安保机构解除保险图Fig.10 Safe and arming systemafter test
4结论
本文提出了MEMS保险机构加载模拟装置。该装置可以通过改变电机的转速和扭簧的扭矩,在一定范围内改变加载加速度的幅值和加载时间。实验结果表明,该模拟实验装置能够在一定程度上模拟MEMS保险机构在实际发射过程中受到的加速度变化,具有结构简单,操作方便,适用范围广等优点。后续工作内容可以对小旋转板的结构进行设计,使其可以更加准确的控制作用时间。
参考文献:
[1]陈强强. 引信发射后坐与旋转双环境模拟技术研究与模拟系统设计[D].南京:南京理工大学,2003.
[2]夏伟强,范锦彪,马铁华,等.一种高G值冲击加速度模拟实验方法[J].电子测量与仪器学报,2006:104-106.
[3]张艳兵,马铁华,祖静,等.模拟导弹发射的空气炮启动带矢量转台离心机[J].探测与控制学报,2012,34(1):28-32.
摘要:针对火箭弹引信主动段时间较长,已有的实验设备无法模拟解保过程中加速度变化的问题,提出了MEMS保险机构加载模拟装置。该装置具有两个旋转机构,分别由电机和扭簧驱动。通过改变电机的转速和扭簧的力矩,可以在一定范围内调整加速度幅值和加载持续时间。实验结果表明,该装置具有结构简单,操作方便,适用范围广的特点,对MEMS安保机构可实现数千g加速度和数毫秒持续时间的加载模拟。
关键词:MEMS引信安保机构;加速度模拟;旋转台;强力磁铁
A MEMS Safe and Arming System Load Simulation Device WANG Pengyingkai, SUI Li, LI Guozhong
(Science and Technology on Electromechanical Dynamic Control Laboratory, Beijing 100081, China)
Abstract:The specific acceleration change is hard to be simulated when a certain type of rocket projectile lunched. This paper proposed a loading device that could solve the mentioned problem. The device had two rotating mechanism, respectively driven by motor and torsional spring. By changing the speed of the motor torque and torsional spring, the acceleration amplitude and duration of loading could be adjusted in a certain range. The experimental results showed that the device had simple structure and the operation was convenient, which could simulate the loading of thousands g maintaining several ms of MEMS safe and arming system.
Key words:MEMS safe and arming system; acceleration simulation ; rotating mechanism; NdFeB
中图分类号:TJ434.2
文献标志码:A
文章编号:1008-1194(2015)06-0017-04
作者简介:王彭颖恺(1992—),女,河南洛阳人,硕士研究生,研究方向:传感与机电控制。E-mail:wpyk1992@126.com。
*收稿日期:2015-06-15
