基于STM 32的绿色环保型洗筷消毒一体机设计与制作
2015-02-20 13:47
装备制造技术 2015年7期
(河池学院物理与机电工程学院,广西 宜州 546300)
本文研究了一款基于STM32[4]的绿色环保型洗筷消毒一体机设计与制作。该设计通过浊度传感器对结果进行判断,通过加长转臂的舵机转向对筷子的流向进行控制。使用符合PI算法的控制器实现直流电机的调速。为了使本设计能够快速、平稳地运行,系统必须把相应的转向伺服电机控制以及直流驱动电机控制准确地结合在一起。
1 总体结构和工作原理
本设计的总体结构包括机械装置和电路控制系统两部分组成。机械部分由收集装置[1-2]、一次清洗装置、二次清洗装置、运送装置[3,5]、消毒出筷装置五部分构成,具体结构如图1所示。其中,收集装置主要利用限位机构对筷子进行定量收集。一次、二次清洗装置主要由电磁阀、直流电机、浊度传感器、超声波发生器以及物理清洗机构组成。运送过程主要利用升降装置完成。消毒出筷装置主要由紫外线臭氧发生器,以及半自动出筷机构组成。在清洗过程中全程采用MG996R舵机对筷子的流向进行辅助控制,保证清洗过程的顺利进行。电路控制系统为本设计的核心组成部分,它由电源电路、信号采集电路、信号控制电路、直流电机调速电路、以及舵机转向电路组成。本设计采用STM32单片机控制整个电路,该芯片具有丰富的增强I/O端口运行速度快。
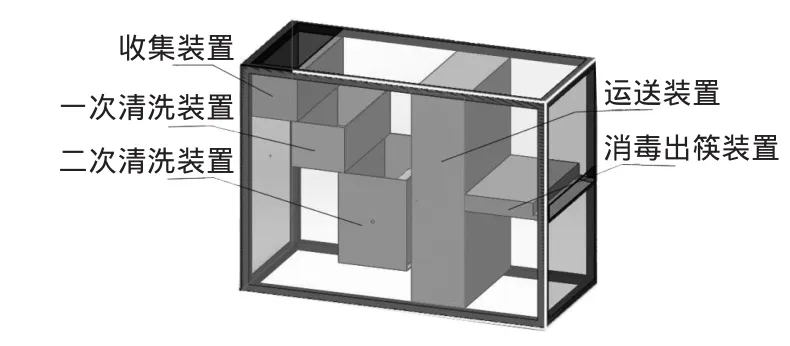
图1整体结构示意图
2 控制电路系统的设计
2.1 电源电路
本设计采用220 V交流电直接进行供电,方便易得。设计电源电路如图2所示。交流电经整流模块后再经过可调电阻RH1以及稳压器LM7805和LM7812经过降压后可得到+5 V和+12 V的电压给其余电路进行供电。
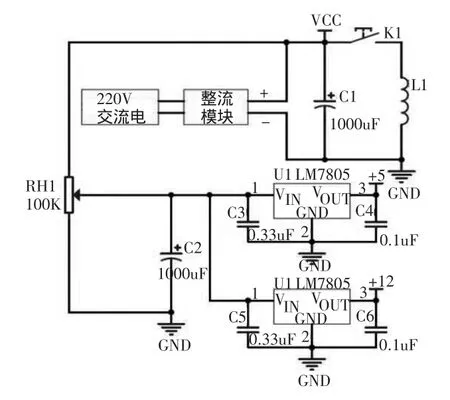
图2设计电源电路
2.2 信号采集电路
信号采集电路用于对工作过程中产生的信号进行采集,本设计采用I2C总线进行信号采集,I2C总线通过上拉电阻接正电源。当总线空闲时,两根线均为高电平。连到总线上的任一器件输出的低电平,都将使总线的信号变低,即各器件的SDA及SCL都是线“与”关系,用来对本设计中各装置中产生的信号进行收集,再传输给STM32单片机进行数据处理。I2C总线信号采集如图3所示。

图3 I2C 总线信号采集电路
2.3 信号处理电路
本设计通过电流采集进行信号处理,如图4所示前一级运放构成减法电路,后一级运放用来进行高阶滤波+5 V电流经电阻分压后,用来减掉电流传感器0 A时的基值电压。经二阶滤波电路滤波,并经过后级运放的2倍放大后引脚1输出电压2 V,引脚1与STM32的模数转换通道相连,转换结果提供给主程序,以便进行相关的处理。
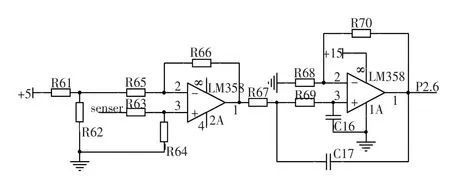
图4信号处理电路
2.4 直流电机调速电路
本设计采用L298对直流电机进行调速控制,如图5所示。利用该芯片可控制直流电动机的转速与转向,同时利用转速差用物理分离的方法将杂质进行分离。
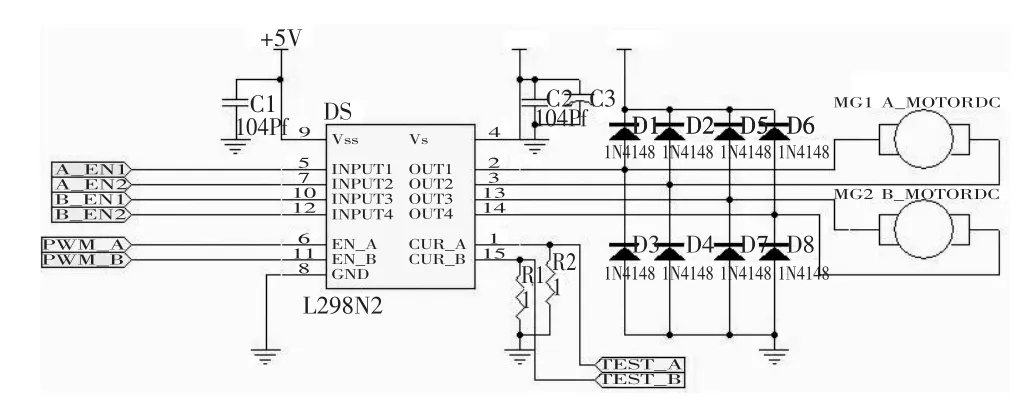
图5直流电机调速电路
2.5 舵机转向控制
本设计利用PWM信号对舵机控制转向舵机自身硬件特性决定:在给定电压一定时,空载和带载时的角速度ω分别保持恒值,而线速度ν=ω·R,正比于转臂的长度R。当舵机所需转动幅度一定时,长转臂要比短转臂转动的角度小,即响应更快。
3 模糊PID控制系统的设计
本文控制多采用直流电机和伺服舵机,其具有结构简单、体积小、重量轻、免维护等诸多优点。直流电机是一个非线性、多变量、强耦合的系统,常规PID控制策略的参数不能随电机运转状况的不同而变化,因此PID控制器不能提供很好的控制性能,而本文采用的模糊PID控制是模糊控制和PID控制的有效结合,可以在线调整PID控制参数,提高控制精度,获得更好的控制效果。
如果设定的速度为Vd,而当前的实际速度为Vr,则速度偏差:
偏差变化率:

将速度偏差 e(t)和偏差变化率 EC(t-1)作为控制器的输入变量,而控制量KP、KI、KD为输出变量,编码器实时测量值c(t)为比较变量。则控制器原理图如图6所示。
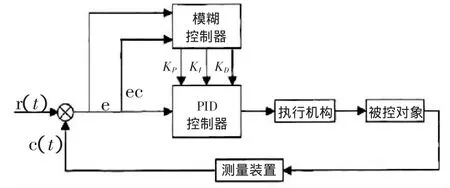
图6模糊PID控制原理图
根据操作人员经验以及模糊规则确定法通过反复的实验对比来确定模糊控制规则,使系统达到动、静特性的最佳效果。根据PID参数规则建立△KP、△KI、△KD模糊分布规则。
4 控制系统的软件设计
控制系统的软件开发是基于STM32单片机进行的,软件开发主要包括主程序流程的设计、子模块初始化设计、电机启动模块设计、模糊PID控制模块设计等。
控制器上电后,首先进行的是各个子模块的初始化,子模块初始化完成之后,依据霍尔传感器反馈的高低电平来判断当前电机转子的位置,确定需要导通的相,以此完成电机启动。程序流程如图7所示。
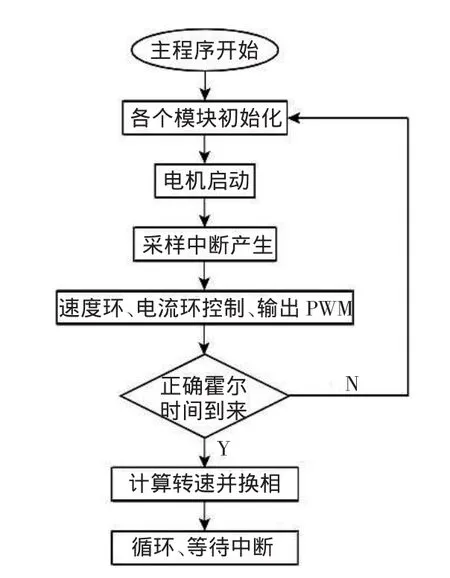
图7主程序流程图
5 测试及实验结果

表1 消毒毒方法的菌落均数比较
[1]陈立德.机械设计基础[M].北京:高等教育出版社,2004:236-238.
[2]Ministry ofMachinery Industry statistics compiled.Mechanical transmission[M].Machinery Industry Press.2004:78-89.
[3]苏 鹏,周风余,陈 磊.基于STM32的嵌入式语音识别模块设计[J].单片机与嵌入式系统应用,2011,11(2):42-45.
[4]许德珠.机械工程材料[M].北京:高等教育出版社,1992:86-128.
[5]温熙森,陈循,徐永成,等.机械系统建模与动态分析[M].北京:科学出版社,2004:47-89.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
自动化学报(2019年6期)2019-07-23
电子制作(2018年11期)2018-08-04
电子制作(2018年1期)2018-04-04
电子制作(2017年1期)2017-05-17
制造业自动化(2017年2期)2017-03-20
电子制作(2016年1期)2016-11-07
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27