基于红外虚拟偏振的目标增强方法
2015-02-18 01:54邱跳文李吉成王沙飞
系统工程与电子技术 2015年5期
张 焱, 邱跳文, 李吉成, 王沙飞
(1.国防科学技术大学电子科学与工程学院ATR重点实验室, 湖南 长沙 410073;
2. 中国北方电子设备研究所, 北京 100191)
基于红外虚拟偏振的目标增强方法
张焱1, 邱跳文1, 李吉成1, 王沙飞2
(1.国防科学技术大学电子科学与工程学院ATR重点实验室, 湖南 长沙 410073;
2. 中国北方电子设备研究所, 北京 100191)
摘要:研究了一种基于虚拟变偏振理论的红外面目标细节增强方法,该方法充分挖掘和利用了红外偏振信息的固有特点,利用入射光Stokes矢量和出射光光强之间的描述关系推导出出射光光强和起偏角度的解析关系,并据此虚拟实现了任意起偏角度的出射光光强,然后依据面目标信杂比最大准则,利用粒子群算法迭代实现了最优起偏角度的搜索,最终得到增强后的红外面目标图像。利用实测的长波红外偏振图像数据对算法的可行性和有效性进行了验证,实验结果表明,在灰度对比度、平均梯度、图像熵3种图像质量评价指标下,经此算法增强后的图像质量更高,为后续目标细节识别和攻击点选择等算法的实现奠定了良好的数据基础。
关键词:红外偏振; 目标增强; 虚拟变偏振; 粒子群优化
0引言
红外偏振成像探测主要利用目标与背景的红外辐射偏振特性及其差异,实现目标探测与识别。目标与背景的红外辐射偏振特性差异主要来源于目标和背景材料及表面粗糙度不同所引起的对光波折射、反射、吸收、辐射的能量和角度的差异[1-4],这种差异反映到探测器成像平面上即为目标和背景在图像上的差异。一般情况下,基于红外偏振信息实现目标探测识别主要有3个技术环节[5-6]:一是对景物光波的偏振态分解、扫描、角度编码,从探测器的光强响应中解算出景物光波的偏振信息;二是在获取的景物光波偏振原始图像基础上,进行图像的处理、增强和融合,最后可视化显示偏振图像;三是提取稳定的、具有唯一性的目标特征,实现目标探测和识别。
可见,为了后续探测识别任务的高效实现,上述技术环节中的第2步图像信息增强和偏振信息可视化过程非常重要。目前在红外目标探测识别领域,研究广泛的图像信息增强方法大致可分为:对比度增强、同态滤波增强、伪彩色和假彩色增强、基于偏微分方程的图像增强等。
在对比度增强方法中,直方图均衡及其各种变形方法[7]是比较通用的方法,该系列方法的基本原理是对直方图灰度分布较密的部分进行拉伸,灰度分布稀疏的部分进行压缩,因此该方法不可避免地会产生块效应,从而使得增强后的图像在视觉效果上较差。伪彩色和假彩色增强方法[8-9]是基于彩色图像比灰度图像具有更为丰富信息的前提的,常用的该类增强方法有基于灰度等级的伪彩色变换、基于色彩空间模型的伪彩色变换和频域的伪彩色变换,但是这类方法的问题是采集到的图像的类型各有不同,因此建立的映射关系不可能同时适应不同类型的图像,在表现效果上时好时坏。
基于偏微分方程的图像增强方法[10]的基本原理是通过求解偏微分方程实现图像去噪,从而达到图像增强的目的,其初始条件是输入的噪声图像,求解结果是无噪图像,该类方法的优势是对图像进行非线性去噪,在去噪时可以较好地保持边缘结构信息,但是当图像的噪声强度比较大时,噪点处的梯度信息可能会与图像边缘的梯度相近,不仅不能去除噪声,还会破坏带有噪声的边界。
综上所述,为了实现红外目标的图像信息增强,应根据图像的应用背景,充分挖掘和利用其固有特点,改善图像的视觉效果。由前述可知,目前的红外目标偏振图像增强方法大多与传统红外图像增强方法并无二致,很少依据其特有的偏振信息实现图像质量的改善和探测识别特征的增强。由目前公开发表的技术文献可知,直接利用偏振特性进行红外目标图像增强的方法较少。本文提出一种基于红外虚拟变偏振的目标增强方法,该方法首先利用Stokes矢量表示方法对含有目标的红外偏振信息进行表征,解算出射光光强与起偏角度之间的解析关系,然后利用这种解算关系虚拟出在[0°,360°]范围内的任意起偏角度对应的出射光光强,随后利用粒子群优化算法搜索得到信杂比最大原则下的最优出射光光强图像,从而实现红外目标的优化增强。利用实测的3个不同场景长波红外偏振成像数据对本文算法进行实验验证,并分别利用灰度对比度、平均梯度、信息熵等3个图像质量评价指标对目标增强后的图像进行评价,结果表明本文提出的算法具有较好的红外面目标增强能力。
1红外虚拟变偏振目标增强方法实现
1.1虚拟变偏振的基本思想
文献[11-12]首次提出“虚拟极化”(virtual po1arization, VP)的概念。其实质是:不依靠改变实际的接收天线和馈线中的极化状态来获得不同的极化,而只是通过对正交双通道接收信号进行适当处理,达到与改变接收天线和馈线中极化状态相一致的效果,这种极化方式被称为虚拟极化。
由于红外偏振信息具有和雷达极化信息相似的特性,因此如果能够依据红外偏振探测系统测得基准起偏方向的偏振光强度值,虚拟出任意起偏角度下的红外偏振强度图像,就可依据某种准则实现基于偏振特征的目标最优接收及背景最大抑制,达到增强目标、抑制干扰背景的效果。
1.2虚拟变偏振的实现
首先利用偏振成像探测系统获取4个确定起偏角度的偏振强度图像,并采用Stokes矢量表示方法[13]实现偏振信息的表征。
1.2.1基于Stokes矢量实现目标红外偏振信息描述
采用Stokes矢量表示法对红外偏振信息进行描述,根据马吕斯定律、晶体双折射及偏振光的干涉原理,Stokes矢量可表示为如下形式:
(1)
Stokes矢量中4个元素均有各自的物理意义:I表示偏振光的强度;Q是电场矢量在x,y这2个方向上的分量的强度差;U是电场矢量在+45°方向与-45°方向的2个分量之间的强度差;V是电场矢量中右旋圆偏振分量和左旋圆偏振分量之间的强度差。
1.2.2基于Stokes矢量实现入射光和出射光之间的关系描述
当一束光与物质相互作用时,出射光的4个Stokes参数分别与入射光的4个Stokes参数成线性函数关系,写成矩阵形式如下:
(2)
式中,Mβ为线偏振片的Mueller矩阵;β为线偏振片的透射轴方向与参考方向的夹角(简称起偏方向);Mγ为1/4波长的线性延迟器的Mueller矩阵;γ为快轴方向与参考方向夹角。在只加装金属线栅偏振片的情况下,式(2)可简化成如下形式:
(3)
式(3)中各参数含义与式(2)相同。
得到出射光的光强表达式为
(4)
然后,计算Stokes矢量表示公式中的各参数值,确定起偏角度与出射光偏振光强度值之间的解析关系。

将解出的[I,U,Q]代入式(4),得到出射光光强I′和起偏角度β之间的确定解析关系,如式(5)所示:

(5)
依据式(5)即可虚拟得到任意起偏角度的出射光光强值I′(β)(β∈[0°,360°])。
1.3利用粒子群方法搜索最优起偏角度,实现红外面目标增强
首先,根据光强值I′(β)与图像灰度值之间的正比关系,模拟出灰度图像Mβ(i,j),(i,j)为图像像素点位置,I′(β)的每一个分量对应图像各像素点的灰度值。然后,利用区域增长法在图像中分割出面目标,将其灰度值记为S(i,j),并选取同样大小的在背景区域,其灰度值记为C(i,j),(i,j)为图像像素点位置。
根据式(6)计算模拟图像Mβ(i,j)的面目标信杂比(signal to clutter ratio, SCR)为
(6)
式中,σ2表示图像Mβ(i,j)的方差。
然后利用粒子群寻优方法实现信杂比优化,并确定相应的起偏角度。
粒子群算法(particle swarm optimization, PSO)是基于群体智能理论的优化算法,该算法保留了基于种群的全局搜索策略,但其采用的速度-位移模型,操作简单,避免了复杂的遗传操作,能在较少的迭代次数内找到最优解[13-14]。
由于函数SCRβ(β)难以通过解析的手段求解出其极值点,因此本文利用粒子群算法进行全局寻优求解,在实现过程中,本文将信杂比函数SCRβ(β)作为适应度函数,依据式(6)计算各个粒子的适应度值,算法结束后,得到最好位置Pgd对应的最优起偏角度βopt,以及最优信杂比SCRβ(βopt),而SCRβ(βopt)对应的模拟图像Mβopt(i,j)则为信杂比最大准则下的最优虚拟红外偏振图像,在此图像中面目标的SCR最大,面目标得到有效增强。
2实验及结果分析
2.1红外偏振成像的实验结果及分析
采用实验室构建的长波红外偏振成像探测系统获取3个不同场景的偏振图像进行算法有效性验证。3个场景具有一定的代表性:一是外挂于室外混凝土墙壁的空调目标,该目标其自身材质为金属涂白漆材质,内部细节丰富,且与背景形成鲜明的材质对比;二是以云层为背景的通信铁塔,该目标自身细节极为丰富;三是以林地为背景的远景楼群目标,该目标距探测距离大于3km,其材质主要为混凝土材质。本实验首先获取各场景原始长波红外图像(如图1所示)。由图1可见,由于获取数据的时间为24∶00,因此场景1中的空调目标辐射强度很弱,在图像中目视基本不见;在场景2中,云层背景比较清晰,如若处理的是小目标数据将会淹没于云层杂波之中;在场景3中,由于成像距离远,且楼群与背景林地的发射率基本相当,因此目标与背景的灰度对比度较低,基本淹没于背景之中。

图1 不加偏振的长波红外原始图像

图2 长波红外偏振光强图像
图2为各场景对应的0°、60°、120° 3个确定起偏角度的红外偏振光强图像,从中可见:较之原始红外图像,3个场景的偏振图像中目标的目视清晰度均有改善,场景2和场景3中的背景得到一定抑制,而且随着起偏角度的变化,场景1中的空调目标和场景2中铁塔目标内部细节的清晰度也有所变化。
2.2虚拟变偏振的实验结果及分析
以场景2为例,验证虚拟变偏振算法的可行性。场景2的主要特点是:铁塔目标材质为金属材质,背景为云层背景,铁塔目标细节丰富,便于虚拟变偏振验证算法的有效性。
图3为本文虚拟的起偏角度为60°的偏振光强图像与实测图像对比结果。从图3(c)中可见,图像大小为588×454,其中155 579个像素(占整个像平面的58.3%)灰度残差值∈[0,5],105 932个像素(占整个像平面的39.7%)灰度残差值∈[5,10),5 439个像素(占整个像平面的2%)灰度残差值∈[10,20),2个像素的灰度残差值∈[20,30),可见本文虚拟的偏振图像与实测图像具有较好的相似性。

图3 本文虚拟的起偏角度为60°的偏振光强图像与实测图像对比结果
为了进一步验证相似性,分别利用式(7)计算起偏角度为0°、60°、120°的实测数据与虚拟数据的灰度相似性,对应各值如表1所示,相似度>0.8。综上所述,利用本文方法虚拟得到的偏振光强图像与实际测量的偏振光强图像具有相当高的相似性。
(7)
式中,ST(i,j)为实际测量的偏振光强图像各像素点灰度值;SV(i,j)为本文方法虚拟得到的偏振光强图像个像素点灰度值;(i,j)为图像像素点位置。
2.3基于信杂比最大原则的目标增强实验结果及分析
首先,采用遍历式的方法得到3个场景的信杂比与起偏角度之间的函数关系曲线图(如图4所示),但此种方法在实际工程应用中不便于实现。

图4 SCR与起偏角度之间的曲线关系图
故而,本文利用粒子群优化方法解决信杂比寻优问题。图5分别为3种场景对应的粒子群适应度函数进化曲线图,其中适应度值即为信杂比值,从中可见,迭代大约10次,进化曲线趋于收敛,将收敛值与图4中通过遍历方法得到的对应最优值相比较,可见通过此种方法可以快速地寻到全局最优。

图5 粒子群寻优算法实验结果图
图6为最优信杂比条件下虚拟得出的偏振光强图像,将其与未加偏振的原始红外图像以及实测的偏振光强图像图像相比较,可见:场景1中空调目标明显突显于混凝土外墙,目标边缘及内部结构(例叶片结构)清晰;场景2中铁塔结构清晰可见,不同部位灰度层次分明,云层背景平均灰度值低,干扰被有效抑制;场景3中楼群目标灰度层次显现,突显于背景之中。
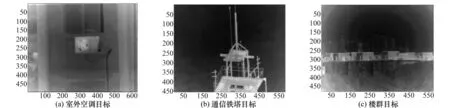
图6 最优信杂比条件下对应的偏振光强图像
为了更为客观地验证本文增强方法的有效性,利用灰度对比度、平均梯度、图像熵等3种图像质量评价指标(3种指标的计算方法参见文献[16])对更多的数据进行定量评价,如表2所示,从中可以看出:在54组数据当中,除6组数据指标外,绝大多数指标低于本文虚拟增强后的图像相应的指标。在这6组数据中,场景2中未加偏振的原始红外图像有2项指标高于虚拟增强图像,究其原因主要是通信铁塔目标成像质量很高,在原始红外图像中属于高亮目标,故而加装偏振片后,虽对其细节成像有益处(平均梯度指标得到提高),但由于光通量的降低,目标灰度对比度反而略有下降;再者,由于通信铁塔目标属镂空结构,在计算原始红外图像墒值时,云层背景对其有贡献,因此墒值较大,在计算红外偏振图像墒值时,云层背景被抑制,因此墒值较小。综上所述,根据定性和定量的比较,经本文算法增强后的图像具有更高的灰度对比度、更大的平均梯度以及更高的图像墒。
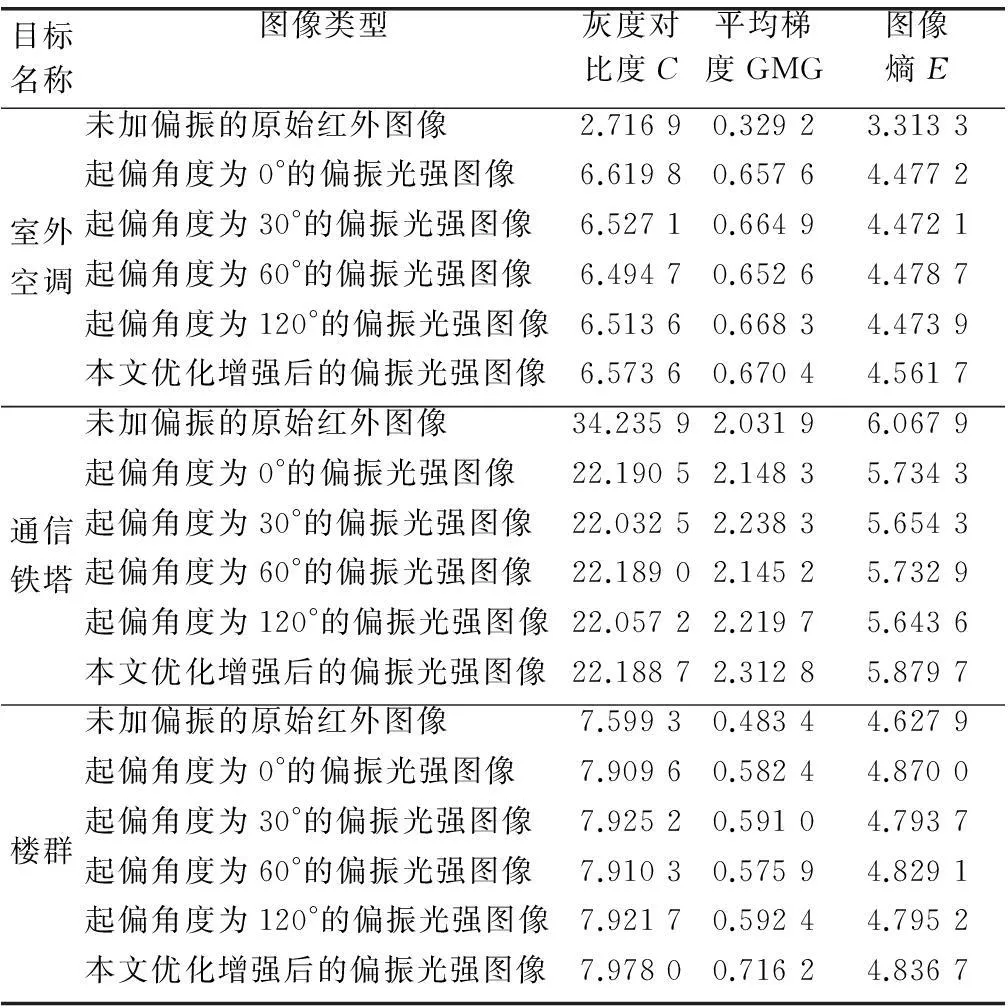
表2 3种评价指标下的实验结果对比
3结论
本文研究了一种基于红外虚拟变偏振的面目标增强方法,该方法将雷达虚拟极化理论应用于红外偏振信息处理领域,利用入射光Stokes矢量和出射光光强之间的描述关系推导出出射光光强和起偏角度的解析式,并据此虚拟得到任意起偏角度的出射光光强,然后依据信杂比最大准则,实现最优起偏角度的搜索,最终得到增强后的红外目标图像。利用实测的3个不同场景的长波红外偏振图像数据对算法的可行性和有效性进行了验证,实验结果表明,经本文算法处理后的图像面目标增强效果明显,利用灰度对比度、平均梯度、图像熵等3种图像质量评价指标进行定量评价,亦表明本文在面目标增强方面的有效性。
参考文献:
[1] Smith M H, Howe J D, Woodruf J B, et al. Multispectral infrared stokes imaging polarimeter[C]∥Proc.oftheSPIE,1999:137-143.
[2] Iannarilli F J, Shaw J A, Jones S H, et al. Snapshot LWIR hyperspectral polarimetric imager for ocean surface sensing[C]∥Proc.oftheSPIE, 2000:270-283.
[3] Sandus O. A review of emission polarization[J].AppliedOptics, 1965, 4(12):1634-1642.
[4] Ben-Dor B.Oppenheim and balfour. Polarization properties of targets and backgrounds in the infrared[C]∥Proc.oftheSPIE. 1992.1971:72-77.
[5] Stephanie H S, Matthew P F. Two long-wave infrared spectral polarimeters for use in understanding polarization phenomenology[J].Opteng, 2002,41(5):1055-1064.
[6] Rogne T J,Smith E G,Rice J E. Passive target detection using polarized components of infrared signatures[C]∥Proc.oftheSPIE,1990:242-251.
[7] Liu J Y, Zhang P Y, Xiao R X, Image fusion algorithm at pixel level of polarization infrared image[J].InfraredandLaserEngineering, 2007(36):286-289.(柳继勇, 张聘义, 肖仁鑫. 一种偏振红外图像的像素级融合算法[J].红外与激光工程,2007(36):286-289.)
[8] Chen W L, Wang X, Jin W Q, et al. Approach to fusing MWIR polarization image based on wavelet packet transform[J].TransactionsofBeijingInstituteofTechnology, 2011, 31(5):578-582.(陈伟力, 王霞, 金伟其, 等. 基于小波包变换的中波红外偏振图像融合研究[J].北京理工大学学报,2011, 31(5):578-582.)
[9] Yang F B, Li W W, Lin S Z, et al. Study on fusion of infrared polarization and intensity images[J].InfraredTechnology, 2011,33(5):262-267.(杨风暴,李伟伟,蔺素珍,等.红外偏振与红外光强图像的融合研究[J].红外技术,2011,33(5):262-267.)
[10] Li W W, Yang F B, Lin S Z, et al. Study on pseudo-color fusion of infrared polarization and intensity image[J].InfraredTechnology,2012, 34(2):109-113.(李伟伟, 杨风暴, 蔺素珍, 贺栋. 红外偏振与红外光强图像的伪彩色融合研究[J].红外技术. 2012,34(2):109-113.)
[11] Poelman A J. Virtual polarization adaptation, a method of increasing the detection capabilities of a radar system through polarization vector processing[J].IEEProceedings-PartF:Communication,RadarandSignal, 1981,128(10):261-270.
[12] Li J Z. Realization of radar virtual polarization[J].ElectronicsEngineering, 2008(4):1-4.(李建政. 雷达虚拟极化的实现[J].电子工程,2008(4):1-4.)
[13] Smith M H, Howe J D, Woodruf J B, et al. Multispectral infrared stokes imaging polarimeter[C]∥Proc.oftheSPIE,1999:137-143.
[14] Xu G G, Jia Y.Matlabrealizationofpatternrecognitionandintelligentcomputing[M]. Beijing:Beijing University of Aeronautics and Astronautics Press, 2011.(许国根,贾瑛.模式识别与智能计算的Matlab实现[M].北京:北京航空航天大学出版社,2011.)
[15] Yang S Y, Zhang Y,Swarmintelligenceandevolutionarycomputation-matlabtechnologytorealize[M]. Beijing: Publishing House of Electronics Industry, 2012.(杨淑莹,张桦.群体智能与仿生计算[M].北京:电子工业出版社,2012.)
[16] Mark S N, Alberto S A.Featureextractionandimageprocessingsecondedition[M]. Singapore: Elsevier Pte Ltd, 2010.
张焱(1975-),女,副教授,博士,主要研究方向为光学成像自动目标识别。
E-mail:atrthreefire@nudt.edu.cn
邱跳文(1990-),男,硕士,主要研究方向为红外目标特性分析。
E-mail:qiutiaowen@126.com
李吉成(1970-),男,教授,博士,主要研究方向为光学成像制导。
E-mail:LIjicheng@nudt.edu.cn

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141105.1633.012.html
Infrared surface target enhancement based on virtual
variational polarization
ZHANG Yan1, QIU Tiao-wen1, LI Ji-cheng1, WANG Sha-fei2
(1.ATRKeyLaboratoryofSchoolElectronicScienceandEngineering,NationalUniversityofDefenseTechnology,
Changsha410073,China; 2.ElectronicEquipmentInstituteofNorthChina,Beijing100191,China)
Abstract:A surface target enhancement method based on the virtual variational polarization theory is proposed, which makes full use of the inherent characteristics of infrared polarization information. By using the description relationship between the stokes vector of the incident light and the intensity of the emitted light, the analytical relationship between the intensity of the emitted light and the polarizing angle is derivated, and thus virtually realizes the intensity of the emitted light with any polarizing angle; then according to the surface target criterion of the maximum signal-to-noise ratio, the searching of optimal polarizing angle is iteratively realized by using the particle swarm algorithm, and finally get the enhanced infrared surface target image. The feasibility and validity of the algorithm are validated by using the real long wave infrared polarization image. Experimental results show that, the enhanced image using the proposed algorithm has better quality under three image quality evaluation indexes of gray scale contrast, average grads, and image entropy, which lays a good foundation for realizing the following algorithms of target detail recognition and attacking point choosing.
Keywords:infrared polarization; target enhancement; virtual variational; particle swarm optimization
作者简介:
中图分类号:TN 957
文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.02
基金项目:国家自然科学基金(61302145,61101185)资助课题
收稿日期:2014-03-10;修回日期:2014-08-10;网络优先出版日期:2014-11-05。