
直流伺服电机控制系统的设计
2015-02-16 03:14陈希平
产业与科技论坛 2015年2期
□陈希平 张 翔
一、引言
直流与交流电机的问世推动了整个电力电子行业的发展,而数字化是伺服系统发展的重要标志,但目前国内外大多的伺服系统还是被国外所占据,尤其是日本德国等,国内机构需加快研发速度,以满足国内市场的巨大需求。
结构和机电一体化是现在的趋势,基于伺服系统的平缝机具有准确的定位,速度调节性与稳定性更强的特点,可以大大提高产品的生产效率与质量。此外此系统还可以用于自动门、机床、注塑机、加工、木工、包装、印刷等控制行业,用途广泛,满足了一些工业场合要求抗干扰能力强,启动快,停针准确,负载能力强,工作频率大等苛刻要求。
二、系统方案设计
(一)方案概述。系统由控制电路、主电路和检测电路组成。主电路又由伺服电机和驱动电路、整流逆变单元、隔离放大电路、保护电路组成。控制电路由DSP 及其外围芯片构成。检测电路有电流检测、速度检测和位置检测。DSP 微处理器对速度、电流、位置信息的采集从而实现对电机速度平稳的调节。
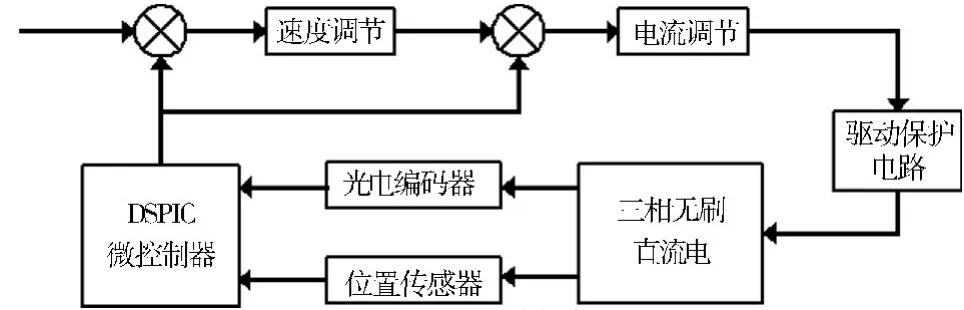
图1 总体结构框图

图2
(二)电路设计。
1.驱动电路。为了保证DSP 可靠工作,将小功率和大功率直接隔离与匹配,采用IR2136 来驱动大功率器件IGBT 来实现三相全桥逆变。通过功率器件和DSP 之间的隔离,避免DSP 的运行受到干扰,加强了整个伺服系统的稳定性。
2.编码器。使用光电式位置传感器。光栅将光线分成束光,当发射器和检测器之间的编码轮移动时,光束通过的空间和棒上的码盘的图案被中断。用以检测这些中断的光电二极管被布置在对应于所述编码轮的半径和计数密度的另一侧。这些探测器也有序间隔开,使得一对检测器交替处于光亮期与黑暗期的状态。光电编码器接收极接收后可以输出两路正交信号,通过测量两个正交信号可以计算出准确的电机转速,并能根据相位判断电机的旋转方向。
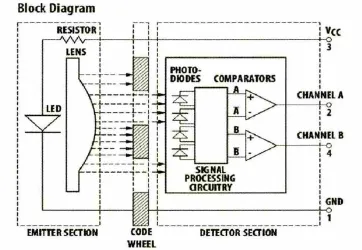
图3
3.脚踏板。电机的启动、调速等功能通过脚踏板来直接控制,由线性霍尔加上滤波电路组成。AH3503 是一个小的、通用的线性霍尔效应装置,可在永磁铁或电磁铁的磁场中可靠工作。根据踩脚踏板的深浅则可以控制输出的电压的大小,最后通过采集AD 信号从而反馈速度的大小。
三、控制程序设计
(一)总体算法设计。控制软件主要通过以脚踏板,键盘作为输入设备,操作整个控制系统的工作模式和运行状态等。由于平缝机伺服系统是一个典型的实时系统,其控制软件就需要具备高实时响应性和可靠性,所以按照模块化的方式进行设计,这样不仅可以提高工作效率,并保证软件的易修改性和可移植性。具体程序框图见图4。
(二)增量式PID 调速算法。实际运用中,为了简便计算,常采用增量式PID 算法。(图4)
△u(k)=Kp△e(k)+Ki△e(k)+Kd[△e(k)+△e(k-1)]
当各项比例系数(Kp、Ki、Kd)确定之后,DSP 便能计算出占空比的增量△u(k),由于输出的为简单的增量,误动作的可能性偏小,算式无需叠加,这样便可以通过加权处理而获得较好的控制效果。
但增量式PID 调节的截断效应大,静态误差也相对较大。工业平缝机的运动带有机械惯性,而且停启动频繁,必须对数字PID 算法进行调节。
改进后使用根据速度偏差量自动调节加权系数的分段式调节。
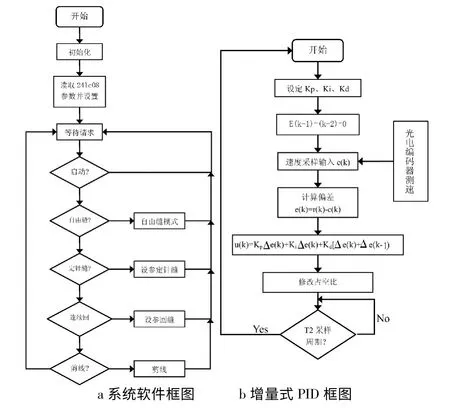
图4
四、实验数据分析
(一)速度数据分析。根据项目技术指标,要求启动至转速稳定的过程快速。达到指定速度需求后速度稳定,精准速度范围的偏差不应大于5%,高速范围速度偏差允许适当增大。获取测试数据见表1。
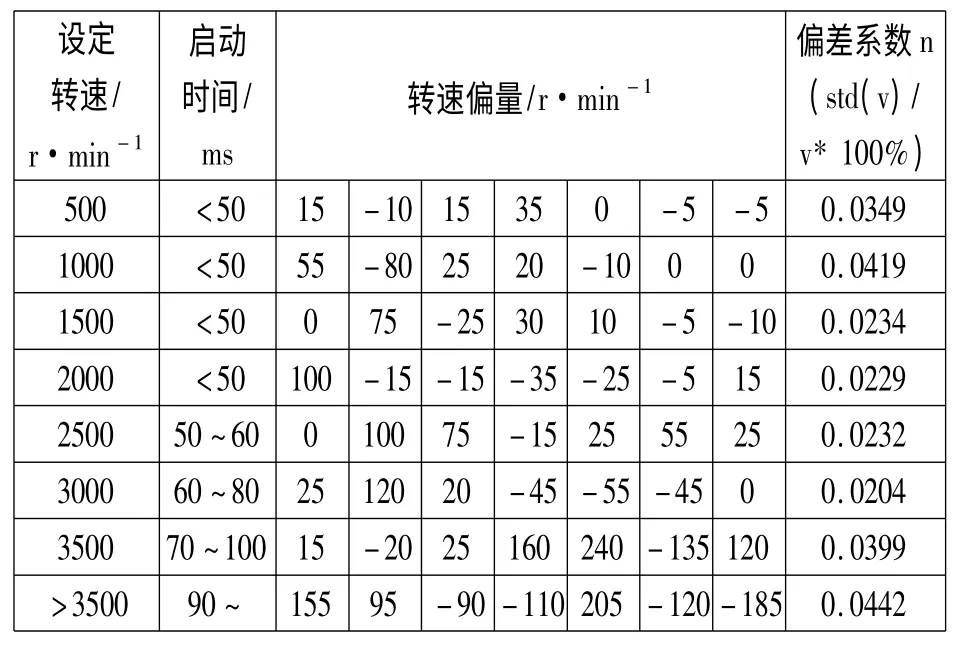
表1 转速调节控制测试数据
根据上表测试数据表明,本系统启动至稳定的响应迅速,在中高转速段的转速偏量依然在需求范围内,能使系统持续工作在一个较好的状态。
(二)停针测试数据分析。影响停针精度的关键是低速时电机转速的稳定,从高速下降至低速(约200r/min)范围内,电机能在此稳定运行,并且保持较好的位置环控制。

表2 不同转速下停针误差
经测试表明,该系统从高速状态下缓冲至低速状态所需时间短,降速后保持低速状态稳定,并且停针位置准确,达到预期要求。
五、结语
本系统由高精度直流伺服电机控制,采用分段式PI 调节以实现高低速稳定控制,并利用能耗制动及反接制动的方式来控制电机的精准定位。经过实践测试,该伺服系统满足工业缝纫机速度稳定、停针精确的基本要求,并在平缝机的应用上有很大的优势,如响应速度快,调速范围宽,定位精度高,运行稳定等指标,拥有良好的控制效果。
[1] 李峻.直流伺服电动机双向驱动器[J].微特电机,1999,2:32~42
[2] 刘恩涛,潘宏侠.高精度无刷直流电机伺服控制系统的设计与仿真[J].电子元器件应用,2012,14(4):46~50
[3] 朱燕青,史旺旺.无刷直流电机转矩脉动抑制新方法[J].电气传动,2011,41(9):6~9
[4] 林建洪,周扬忠.基于DSP 的永磁同步电机伺服控制系统设计[J].电力电子技术,2012,46(1):79~81
[5] 文卫.无刷直流电机的智能控制研究[J].微电机,2011,44(6):97~99
[6] 邰晶,王忠庆.基于直流伺服系统的模糊自适应控制应用[J].电子测试,2010,1:19~23
[7] 谢帅.直流电机伺服控制系统的设计[J].科技资讯,2010,3:212
[8] 胡玮,阮健,李胜,汪晓文,邵汉卿.基于DSP 的直流伺服电机的双闭环控制系统[J].机电工程,2012,29(1):70~73
[9] 侯涛,李鸿征.直流伺服电机的单片机控制[J].焦作大学学报,2010,1:112~113
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
北京航空航天大学学报(2022年6期)2022-07-02
创新作文(小学版)(2017年13期)2017-11-09
制造技术与机床(2017年3期)2017-06-23
电子制作(2017年1期)2017-05-17
发明与创新·大科技(2016年11期)2016-11-19
电子制作(2016年1期)2016-11-07
北京航空航天大学学报(2016年4期)2016-02-27
汽车文摘(2015年4期)2015-12-13
