基于变胞原理的变自由度机构的应用研究
2015-02-14 06:59苏昱景陈绪林
重庆文理学院学报(社会科学版) 2015年2期
苏昱景,陈绪林
(重庆文理学院机电工程学院,重庆 永川 402160)
变胞机构是一种可根据实际工况和环境空间以及机构运动动作的要求进行重组而使机构自由度发生变化的新型机构,在1998年第25 届ASME机构学与机器人学双年会上被提出[1].戴建生教授与张启先院士首次将变胞机构的概念引入我国[2-3].经过国内外学者10 余年的研究,变胞机构的理论取得了很大的发展[2-4],由于变胞机构具有可变多自由度,比传统的机构更加灵活,它在工业机器人以及航空航天领域具有很好的应用前景.
1 变胞机构的基本原理
目前对变胞机构和变拓扑机构还没有严格的界定,通常认为变胞原理就是根据实际工程需要,采用一定的设计和构建方法,通过机构的几何结构的变化实现机构自由度的变化.一般情况下,这类机构在发生一次或一次以上自由度的变化以后仍然具有运动能力[2-3].常用的一般刚性变胞机构由刚性杆件和传统的运动副组成,因此运动副在变胞机构分析设计中具有重要的地位.
1.1 变约束运动副
构件在运动副中的接触的位置不同,导致运动副的约束数发生改变的变胞运动副主要有以下两种:
1)槽销副.如图1所示,该构件由圆柱销与销槽组成,圆柱销在销槽内运动.功能特点为:当圆柱销在销槽中处于不同的位置时,该运动副产生不同的约束数.当圆柱销位于销槽的两端位置不变时,圆柱销只能转动,槽销副产生2 个约束,由高副转变为转动副;当圆柱销位于槽的两端点以外的任意位置(如图中虚线部分)时,槽销副提供1 个约束,保留了转动和直线运动2 个自由度.

图1 槽销副
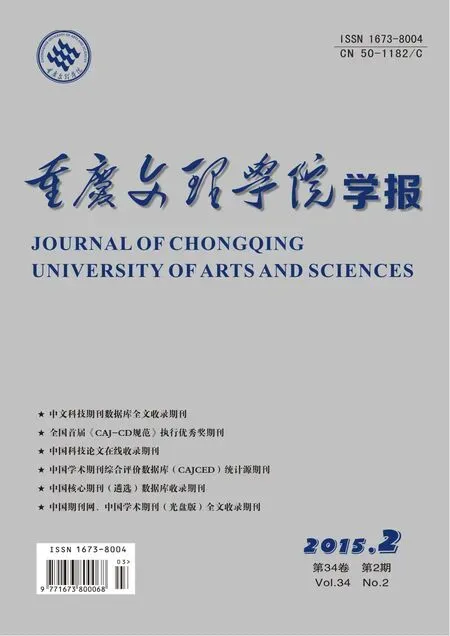
2)间隙转动副.如图2所示,圆柱销的直径小于销孔的直径,销轴和销孔之间有足够间隙使圆柱销在孔内能移动.如果圆柱销在销孔中的位置固定不变,则该运动副产生2 个约束,相当于转动副;如果圆柱销在销孔中的位置发生位移,如A→B,则该运动副具有1 个约束,相当于高副.
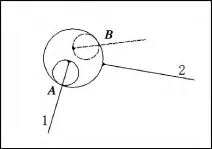
图2 间隙转动副
1.2 组合运动副
图3为移动副和转动副组合形成的运动副.移动副和转动副组合提供4 个约束,因此该运动副具有2 个自由度,相当于1 个高副.当滑块3的位置在槽的两端时,构件2、3 连结成一体,高副将演变为转动副,提供2 个约束,此时该运动副有一个自由度,因此包含该运动副的机构可为变胞机构.
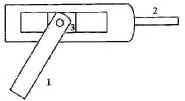
图3 移动副和转动副的组合
1.3 一种停歇式变胞机构
现对图3的组合运动副进行改进,在槽内加上弹簧.弹簧的一端固定在槽内,一端与滑块B 接触,并将它应用到曲柄滑块机构中,如图4所示.
传统的曲柄滑块机构的L1和L2是刚性连杆,现将曲柄滑块机构的曲柄和连杆换成上述L1和L2.L2和滑块B 由铰链连接,滑块B 被弹簧压紧位于槽内顶端,槽的A 端固定于机架上.E 为一挡块,在机构静止或滑块D 在碰到挡块E 之前的运动时的自由度为:
F = 3n -2Pl- Ph= 3 ×4 -2 ×5 = 2
2013年,励丽开始整理报告,希望能够说服卫生部门开办“基层全科医生慢性病综合管理培训班”,并由宁波一院来实施。
当机构在运功过程中碰到挡块E 时,滑块D停止运动,而滑块B 则克服弹簧的阻力沿BA 方向继续运动,此时机构的自由度为:
F = 3n -2Pl- Ph= 3 ×4 -2 ×5 -1 = 1
自由度由2 变为1,机构可以继续运动.可见,此时通常的曲柄滑块机构因为原构件的形态及机构自由度发生变化,可视之为变胞机构.
图4 停歇式变胞机构
2 应用举例
当机器的输入荷载太大时,机构可能发生过载.应用变胞机构使机构的自由度和构件状态发生变化,从而使机构在过载时还能继续运动,可减小构件的受力,对构件进行过载保护.图5为带安全保护的新式颚式破碎机[5],正常情况下构件6由两端的刹车刹紧,使其不能转动,自由度为[6]:
F = 3n -2pl- ph= 3 ×5 -2 ×7 = 1
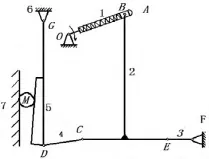
图5 颚式破碎机改进一
若遇到难碎的石块M 时,构件6 将克服摩擦力矩,能绕G 点转动,使自由度变为:
这样可以保证主要部件(动颚板)不致受力太大,从而减少磨损.
同样应用变胞机构得到颚式破碎机的另一种改进方式,如图6所示.
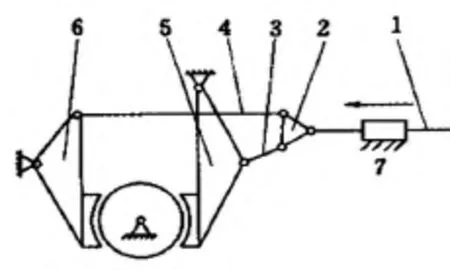
图6 颚式破碎机改进二
将颚式破碎机的曲柄及构件2 改为上述停歇式变胞机构,槽的一端固定于机架上,构件2铰接在滑块B 上,滑块在槽的内部由弹簧压紧固定于槽的A 端,颚式破碎机正常工作时,构件2 与滑块B 相当于转动副,OA 相当于曲柄,自由度与原机构相同,为:
F = 3n -2pl- ph= 3 ×5 -2 ×7 -0 = 1
当执行构件动颚板遇到难碎石块时,原动件OA 将停止转动,但滑块B 克服弹簧弹力继续运动,此时机构的自由度为
F = 3n -2pl- ph= 3 ×5 -2 ×6 -1 = 2
由于滑块B 的继续运动,使颚式破碎机的执行构件动颚板及原动件OA 的受力减小,从而保护了颚式破碎机的动颚板及曲柄等主要部件.
变胞机构还可应用于制动装置.图7为二自由度七杆刹车机构[7],未刹车时,机构的自由度为:
F = 3n - (2pl+ ph- p')- F'= 3 ×6 - (2 ×8 +0 -0)-0 = 2
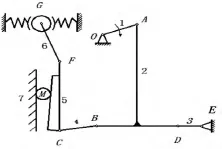
图7 二自由度七杆刹车机构
机构的自由度在刹车过程中,操作杆1 向右拉,一块制动瓦(构件6)与车轮抱紧,相当于一个构件转变为机架,这时机构自由度为:
F = 3n - (2pl+ ph- p')- F'= 3 ×5 - (2 ×7 +0 -0)-0 = 1
接着另一块制动瓦(构件5)再从另一侧与车轮抱紧,机构自由度变为:
F = 3n - (2pl+ ph- p')- F'= 3 ×4 - (2 ×6 +0 -0)-0 = 0 ,
从而达到稳定刹车的目的.
3 结语
传统的机构只具有固定的自由度,有时不能满足机械中对机构具有柔性的要求,当机构可能发生过载或要求机构具有灵活的自由度时,可利用变胞机构使机构在满足功能的同时,受力性能及结构功能更加优化.通过对变胞机构理论所涉及到的图论、机构学、动力学等的深入研究,变胞机构在机械制造、航空航天以及机器人和便携器具设计等领域必将具有广泛的应用.
[1]Dai J S,Rees J J.Mobility in metamorphic mechanisms of foldable/erectable kinds[J].ASME Transaction,Journal of Mechanical Design,1999,121(3):375-382.
[2]戴建生,丁希仑,邹慧君.变胞原理和变胞机构类型[J].机械工程学报,2005,41(6):7 -11.
[3]李瑞玲,戴建生,张起先.基于构态变换的变胞机构结构综合[J].机械工程学报,2002,38(7):12 -16.
[4]郭宗和.平面变胞机构及其结构分析[J].山东理工大学学报:自然科学版,2007,21(1):1 -4.
[5]侯红玲.变自由度机构的构态变换研究[J].机械设计与制造,2012(1):134 -135.
[6]孙桓,陈作模,葛文杰.机械原理[M].第7 版.北京:高等教育出版社,2006:13 -18.
[7]郭宗和,马履中,杨启志.基于变胞原理的变自由度机构拓扑型分析[J].中国机械工程,2005,16(1):1-3.
猜你喜欢
小学生学习指导·高年级(2022年2期)2022-02-16
小学生学习指导(高年级)(2021年6期)2021-06-19
设备管理与维修(2019年22期)2019-12-19
婚姻与家庭·性情读本(2017年1期)2017-02-16
中南大学学报(自然科学版)(2016年2期)2017-01-19
铁道通信信号(2016年10期)2016-06-01
中国塑料(2015年9期)2015-10-14
油气田地面工程(2014年5期)2014-03-09
数学大世界·小学中高年级辅导版(2009年3期)2009-04-14
中学生数理化·高一版(2008年4期)2008-11-15