
基于FPGA的无刷直流电机调速系统设计与实现
2015-01-28 08:13:58李国旭毛红艳孟祥斌赵海波
电子设计工程 2015年17期
李国旭,毛红艳,孟祥斌,赵海波
(1.沈阳工程学院 辽宁 沈阳 110136;2.辽阳供电公司 辽宁 辽阳 111000)
无刷直流电机具有结构简单、体积小、效率高、无级调速、调速范围广、过载能力强等优点,在许多领域得到了广泛的运用,特别是在高性能的伺服驱动领域,在这些领域要求控制器体积小,还要求对多台电机并行控制,单芯片大容量现场可编程门阵列(FPGA)能够实现在系统芯片上实现多台电机的复杂控制功能,大大减小了控制系统的体积[1]。
本文提出了一种无刷直流电动机速度控制器的方案,利用现场可编程门阵列FPGA芯片对电机控制器的进行控制,设计了利用此控制器对无刷直流电机进行调速控制的PWM方法。采用VHDL硬件描述语言实现了转子位置检测电路、驱动电路和电流检测电路,整个控制系统响应速度快、超调小、稳态误差小、可靠性高、灵活性强。
1 无刷直流电机调速系统总体设计
1.1 无刷直流电机调速系统的方案论证
所谓无刷直流电机调速系统,其主要在于PWM调速方法的设计,目的是改变脉冲的占空比。其核心在于智能控制,需要选择一个智能的控制器,而且系统需要的是简单高效,对于开关控制以及信号处理的速度要求并不高,因此采用ALTERA公司的现场可编程门阵列CycloneIIIFPGA芯片。
1.2 无刷直流电机调速系统设计思路
无刷直流电机调速系统以FPGA为中心,配有电流检测模块、位置检测模块、驱动模块、PWM调节等模块,利用霍尔传感器来检测电机电流和电机转子位置,把采集的信号送给FPGA进行处理从而按照人为设定的电机初始速度来发出相应的加、减速和电机正、反转命令并执行。
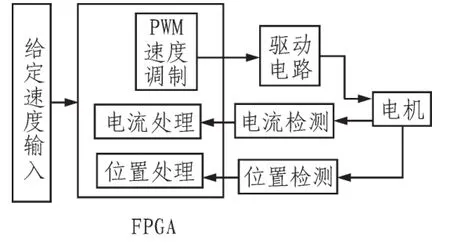
图1 无刷直流电机调速系统总体框架Fig.1 Brushless DCmotor speed control system framework
从系统总体框架图中可以看出,系统主要由驱动模块、电流检测模块、位置检测模块以及PWM调节模块。
无刷直流电机调速系统是这样工作的:当打开电机驱动开关时,电机开始转动,此时位置检测和电流检测电路开始工作以检测电机速度,并将信号传送给FPGA进行处理,如果电机速度大于所需要的电机转速,此时控制电机减速,反之则控制电机加速。在此期间,可以通过按动按键来控制电机的正反转。
2 无刷直流电机调速系统的硬件电路设计
2.1 无刷直流电机调速系统的电流检测电路
采用基于霍尔效应的线性电流传感器ACS712芯片进行电流检测,该器件内置有精确的低偏置的线性霍尔传感器电路,能输出与检测的交流或直流电流成比例的电压。可以精确的检测电机电流,但由于霍尔元件检测的信号非常小,所以要将采集的信号进行放大后送给FPGA,选用芯片LM321进行信号放大,具体电路如图2所示。

图2 直流无刷驱动器Fig.2 Brushless DC drive

图3 电流检测放大原理电路Fig.3 Current detection and amplification circuit principle
2.2 无刷直流电机调速系统的位置检测电路
位置信号检测可以用于电机的换相,还能用来计算电机转速,在无刷直流电机控制中起着十分重要的作用[4]。本设计是采用三个霍尔位置传感器来实现位置检测的,每个霍尔位置传感器输出脉宽180°互差120°相位的霍尔位置信号,三个霍尔位置传感器输出三路位置信号,电机每旋转360°电角度会出现六个上升沿和下降沿,正好把三路位置信号在一个周期分成6个区间,每个区间对应一个换相区间,而每个上升沿或下降沿都对应一个换相时刻,如图4所示。

图4 霍尔元件120°安装方式图Fig.4 Holzer element 120 degrees and mounted
2.3 换相电路设计

图5 霍尔元件式位置传感器输出信号Fig.5 Holzer element type position sensor output signal
根据无刷直流电机模块中输出的三相霍尔位置信号,以及无刷直流电机速度控制模块输出的PWM信号,逻辑换相模块输出6个电机换相及速度控制脉冲。输入4个信号,分别是三相霍尔位置信号 (HA、HB、HC)和由控制模块输出PWM信号。6个输出信号VT1~VT6控制三相逆变器功率管的通断,其中VT1、VT3、VT5用于控制上侧功率管的通断,VT2、VT4、VT6用于控制下侧功率管的通断。三相逆变桥采用上管调制的方式,逻辑关系构造逻辑换相模型如图5。

图6 换相电路Fig.6 Commutation circuit
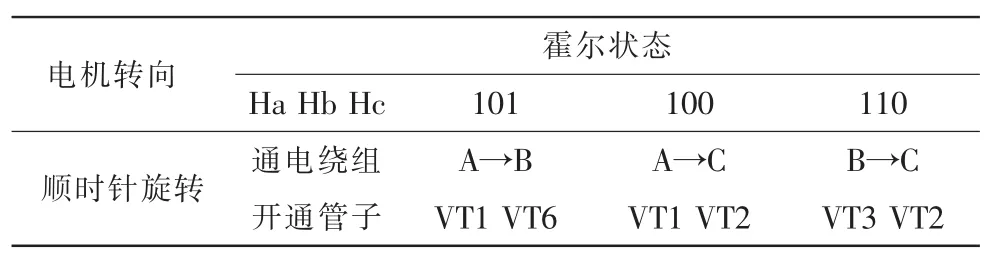
表1 正转逻辑表Tab.1 Forward logic

表2 反转逻辑表Tab.2 Reverse logic table
2.4 无刷直流电机调速系统的驱动电路
采用的是6个MOSFET搭建而成的三相桥式逆变器,MOSFET是开关速度快的理想电压控制器件,其驱动电路较为简单,特别适合于各类中小功率开关电路。同时采用IR2132专用集成驱动芯片,它是专为功率MOSFET驱动而设计的,方便于控制电路连接,其驱动信号延时为纳秒级,开关频率高,体积小,外围走线简单,适合中小型电机驱动电路的应用。6个MOSFET根据所接收到的信号从而改变管子的通断来控制电机的转动。

图7 驱动电路Fig.7 Drive circuit
3 无刷直流电机调速系统的软件设计
3.1 无刷直流电机PWM调速软件设计
PWM调速产生电路是由加减计数器、5位二进制计数器、数字比较器三部分组成。加减计数器做细分计数器,确定脉冲宽度。当U_D=1时,输入CLK1,使设定值计数器的输出值增加,PWM的占空比增加,电机转速加快;当U_D=0,输入CLK1,使设定值计数器的输出值减小,PWM的占空比减小,电机转速变慢。5位二进制计数器在CLK0的作用下输出周期性线性增加的锯齿波。当计数值小于设定值时,数字比较器输出高电平,当计数值大于设定值时,数字比较器输出低电平,从而产生周期性的PWM波形。设定Z_F为电机的方向按键,选择PWM波形的进入方向,当其为1时,电机正转,否则反转。设定START进行电机的控制时,START为1电机开始工作,为0电机停止工作。通过按键EN1的闭合与断开可以改变初始值,从而改变直流电机的PWM占空比,改变直流电机速度。
3.2 PWM调速仿真
如波形仿真图7可知,当电机的速度小于设定值时,计数器数字比较器输出高电平,从而使计数器计数增加,PWM输出为高电平,改变占空比,使电机加速;当电机的速度大于设定值时,计数器数字比较器输出低电平,从而使计数器计数减小,PWM输出为低电平,改变占空比,使电机减速;Z_F是电机的方向按键,Z_F为1时电机正转,Z输出为1;Z_F为0时电机反转,F输出为1;START为电机控制端,START为1电机工作,为0电机停止,Z、F均为0。
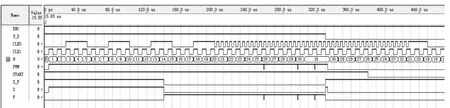
图8 PWM波形仿真Fig.8 The PWM waveform simulation
在时钟脉冲的作用下,计数器CNTA和CNTB都能按照事设定数值进行计数。CNTA是可控的加减计数器,U_D控制其计数的方向,EN1用于设定其初值,当EN1由高电平变为低电平时,就完成了设定值。CNTB是5位二进制计数器,在时钟脉冲CLK0的作用下一直加数,当它加到32时就自动返回到0再重新加数。两路计数器同时加到数字比较器COMPARE上,当CNTB的值小于设定值时,数字比较器输出高电平,当CNTB的值大于设定值时,数字比较器输出低电平。改变设定值的大小就可以改变PWM波形的大小,也就是完成了电机的调速。Z_F是电机的方向控制按键,选择PWM波形的进入方向,当其为1时,电机正转,为0电机反转。至于电机的控制,是在它的输入端加上两个与门来控制电机的启动与停止。当按下键Z_F键,电机正转,松开键时,电机反转。当按下键START时,电机开始工作,松开时,电机停止工作。通过按键EN1的闭合与断开可以改变H[4.0]的值,从而改变直流电机的PWM占空比,这样就可以改变直流电机速度。
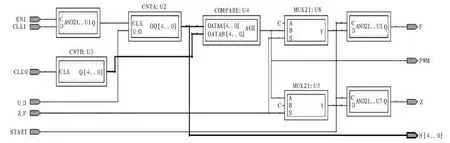
图9 PWM的RTL图Fig.9 PWM RTL graph
4 结 论
通过在理论上对无刷直流电机调速系统电路设计、分析,以及软件的编程,并对软件和硬件进行调试后,实现了一个以FPGA为核心控制器的无刷直流电机的调速,这个系统能够实现检测电机的电流和转子位置和自动调节电机的转速且可以实现控制电机正反转。该系统整个系统运行时钟频率可达到100 MHz以上,控制器可以使控制周期达缩短到40μs,并且具有良好的动态和静态性能,整个系统具有控制简单,操作方便的特点。
[1]潘松,黄继业.EDA技术实用教程[M].北京:科学出版社,2010.
[2]李小明.无刷直流电机调速系统研究与设计[J].机械与电子,2010(35):124-125.LI Xiao-ming.Brushless DC motor speed control system research and design of[J].Mechanical and Electronic,2010(35):124-125.
[3]李竞,胡保生.模糊PID增益调节器的算法、结构及硬件实现[J].西安交通大学学报,1998,32(5):9-13.LI Jing,HUBao-sheng.The algorithm, structure and the hardware realization of fuzzy PID gain control[J].Journal of Xi’an Jiao TongUniversity,1998,32(5):9-13.
[4]毛红艳,王庆利,苏苇.基于GPRS的配电站远程监控终端的设计[J].微计算机信息.2010,26(2):39-40 MAO Hong-yan,WANG Qing-li,SU Wei.The design of GPRS power distribution station remote monitoring terminal of[J].Micro Computer Information,2010,26(2):39-40.
[5]揭贵生,谢顺依.大功率鱼雷直流无刷电动机调速系统用三相逆变器PWM控制的谐波分析[J].海军工程大学学报.2000(6):75-78.Exposing your health,according to Xie Shun.AnalysisPWM three-phase inverter harmonic control of Brushless DCmotor speed control system for high power torpedo[J].Journal of Naval University of Engineering,2000(6):75-78.
[6]董建怀.电流传感器ACS712的原理与应用[J].中国科技信息,2010(5):92-93.DONG Jian-huai.Current sensor ACS712 and application of the principle[J].Information of China Technology,2010(5):92-93.
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
煤气与热力(2022年2期)2022-03-09 06:29:30
湖北农机化(2021年7期)2021-12-07 17:18:46
电子制作(2017年1期)2017-05-17 03:54:12
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10 08:41:20
自动化仪表(2015年5期)2015-06-15 19:01:34
汽车维修与保养(2015年6期)2015-04-17 03:31:40
质量技术监督研究(2015年1期)2015-04-09 06:42:12
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
