
一种新型垃圾处理机械手系统及其智能控制方法
2015-01-27 01:31:10王慰慰
机电产品开发与创新 2015年4期
王慰慰
(国家知识产权局专利局专利审查协作 广东中心,广东 广州 510530)
0 引言
据国家旅游局发布的《中国旅游业统计公报》统计,2010 年至2013 年,国内旅游人数分别为21.03 亿、26.41 亿、29.57 亿、32.62 亿,国内旅游人数的快速增长一定程度上体现了旅游业总体的快速发展。然而,旅游垃圾也随着旅游人数的增长而成正比增长。以矿泉水瓶、易拉罐、饮料罐(镀锡铁)、玻璃瓶为主的瓶罐类垃圾是旅游垃圾的主要组成部分之一,均属于可回收类垃圾,而人工将这些瓶罐从旅游垃圾中分拣出来并进行分类,不仅劳动量大,而且效率较低,另外,旅游垃圾中的有害物质也会损害工人的身体健康。故本文提出一种能够将上述瓶罐从旅游垃圾中分拣并自动进行分类的机械手系统,通过智能化控制实现全自动地高效作业。
1 机械手系统结构设计
1.1 机械手系统整体
如图1 所示,机械手系统整体结构主要包括支架1、两个机械手a 和b、传送带2、八个分类箱3、八个分类板4。机械手a 和b 结构相同,均为四自由度机械手。
支架1 包括4 根支柱1a 和4 根横梁1b,其中一对相对设置的横梁1b 上分别设置有X 向导轨5,每个X 向导轨5 上均设有两个X 向滑块6,四个X 向驱动气缸7 分别固定在上述一对相对设置的横梁1b 的两端。
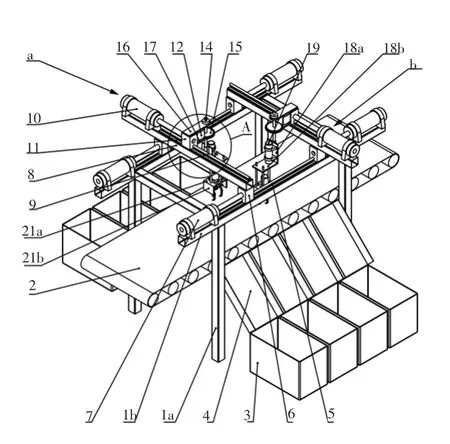
图1 机械手系统整体结构Fig.1 The overall structure of the manipulator system
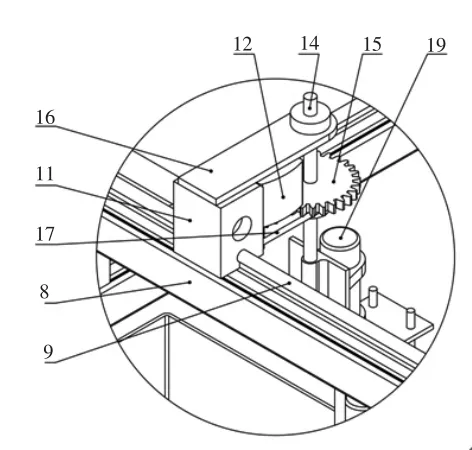
图2 A 处局部放大图Fig.2 The enlarged view of A
两Y 向臂8 与另外一对横梁1b 平行设置,并且每个Y 向臂8 分别与两对应X 向滑块6固接。Y 向臂8 上设置有Y 向导轨9 和Y 向驱动气缸10,Y 向导轨9 上设置一Y 向滑块11。
如图2 所示,Y 向滑块11 一侧固定安装有Z 向旋转电机12,与输出轴止转连接的齿轮与齿轮15 啮合,齿轮15 与Z 向旋转轴14 止转连接,Z 向旋转轴14 通过与Y 向滑块11 固定连接的上连接块16 和下连接块17 而保持。如图1所示,Z 向旋转轴14 下端与连接座18 的背板18a 止转连接,连接座18 的横板18b 固接在背板18a 的下端,横板18b 上固定有Z 向驱动气缸19,并且设置有两个导向孔。安装座21 包括顶板21a 和两支撑板21b,顶板21a 上设置两根导向柱。
传送带2 沿X 向设置在支架1 内,间歇性地输送旅游垃圾。八个分类箱3 均布在传送带2 两侧,分类板4设置在传送带2 和分类箱3 之间,并且分类板4 靠近传送带2 的一侧高于与靠近分类箱3 的一侧,从而在末端执行器20 将夹持瓶罐在分类板4 上松开时,瓶罐在自重作用下滑入对应分类箱3。
1.2 末端执行器
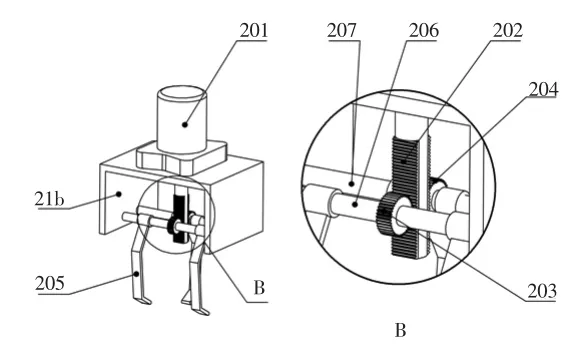
图3 末端执行器及B 处局部放大图Fig.3 The end effector and the enlarged view of B
如图3 所示,采用3 根交错设置的夹爪提高了对瓶罐夹持的有效性。末端执行器包括夹持气缸201、双面齿条202、齿轮203 和204 以及三根夹爪205。
夹持气缸201 的活塞杆与双面齿条202 一端固接,齿轮203 和204 分别与齿轮轴206 和207 止转连接,齿轮轴206 和207转动连接在两支撑板21b 之间,且齿轮203和204 分别与双面齿条202 的其中一面啮合。两根夹爪205 与齿轮轴206 止转连接,并且位于齿轮203 的两侧,另外一根夹爪205 与齿轮轴207 止转连接,且该夹爪与齿轮204 在齿轮轴207 上的位置相对应。
2 智能控制系统
智能控制系统包括图像采集模块、图像处理模块、路径规划模块a 和b、种类识别模块a 和b、运动控制模块a 和b、传感器模块。图像采集模块由安装在与Y向臂平行的两横梁1b 上的六个摄像机a 以及安装在安装座21 上的摄像机b 组成。传感器模块包括安装在各夹爪上的压力传感器以及安装在安装座21 上的红外传感器。智能控制流程如下:
2.1 系统初始化
系统初始化,机械手a 和b 运行至各自的初始位置,并保持初始姿态。装有旅游垃圾的传送带2 向前运动一定距离,该距离与两机械手在X 向的运动范围相等。
2.2 全局图像采集及瓶罐位姿的确定
首先,六个摄像机a 采集传送带2 上旅游垃圾的图像并传送至图像处理模块,通过分析与计算,得到工作区域内传送带2 上所有瓶罐的位姿信息,并用XiYj(i=1~N,j=1~M,X 表示行,Y 表示列)来表示瓶罐在传送带2 平面内的坐标值,将瓶罐在传送带2 上的坐标值从小到大依次排列(首先比较列的大小,列所对应的值越大,则坐标值越大,如坐标值X3Y2<X2Y3,若列相同,行所对应的值越大,则坐标值越大,如X2Y3<X3Y3),将坐标值的该排列与对应瓶罐的位姿信息一一对应储存,并将坐标值最小和最大瓶罐的位姿信息对应发送至路径规划模块a 和路径规划模块b。
2.3 夹持运动路径规划
路径规划模块a 根据坐标值最小瓶罐的位姿信息以及机械手a 当前的位置及姿态信息规划机械手a 的夹持运动路径,并发送至运动控制模块a,控制机械手a 各向驱动气缸以及Z 向旋转电机的运动。同时,路径规划模块b 根据坐标值最大瓶罐的位姿信息以及机械手b 当前的位置及姿态信息规划机械手b 的夹持运动路径,并发送至运动控制模块b,控制机械手b 各向驱动气缸以及Z 向旋转电机的运动。
2.4 目标瓶罐图像采集及夹持运动路径实时修正
机械手a 和b 开始运动,摄像机a 停止工作,摄像机b 开始工作,实时采集目标瓶罐的图像,通过图像处理模块计算得到所采集图像中目标瓶罐的位姿信息,将该位姿信息与存储在图像处理模块中的位姿信息进行比较,并将该误差输入模糊控制器,模糊控制器的输出发送至路径规划模块,实时调整机械手a 和b 的夹持运动路径,从而准确地到达目标瓶罐。
当通过摄像机b 采集到的图像识别出末端执行器运动到目标瓶罐处时,运动控制模块发布命令,控制夹持气缸运动,完成对目标瓶罐的夹持。
2.5 种类识别
当夹爪上的压力传感器检测到夹爪与被夹持瓶罐间的压力大于预先设定的阈值时,运动控制模块启动安装座上的红外传感器,红外传感器将采集到的数据传输至种类识别模块,根据不同材料对红外辐射的吸收程度不同来识别所夹持瓶罐的种类,并将该种类信息发送至对应路径规划模块。
2.6 分类路径规划
路径规划模块根据目前机械手位置以及所夹持瓶罐对应种类的分类板位置规划机械手的分类路径,并发送至对应运动控制模块,控制各向驱动气缸运动,在将夹持瓶罐的末端执行器运动至对应分类箱的分类板时,夹持气缸驱动夹爪松开,瓶罐在自身重力作用下,由分类板滑至分类箱,此时完成一瓶罐从旅游垃圾中的夹持及分类。
重复步骤(2.3~2.6):机械手在上一瓶罐的松开时位姿信息为下一瓶罐夹持时起始位姿信息,机械手a 和b 分别从坐标序列的两端开始瓶罐的夹持与分类,重复步骤(2.3~2.6),直至将工作区域中传送带2 上的瓶罐全部分类完毕。重复步骤(2.1~2.7):传送带2 向前移动一定距离,重复步骤(2.1~2.7)。
3 总结
本文机械手系统中设置两个结构相同的机械手同时工作,每个机械手在三个方向上的移送均采用气缸驱动,并加入了一转动自由度,机械手的末端执行器采用三根交错布置的夹爪。智能控制系统中加入模糊控制,并通过红外传感器快速识别夹持瓶罐的种类。本机械手系统结构简单,响应快,便于控制,提高了夹持的有效性。采用上述智能控制系统,使机械手能够准确到达目标瓶罐,并实现自动分类。本文提出的垃圾处理机械手系统及其智能控制方法解决了旅游垃圾中瓶罐分拣及分类的问题,为旅游业的健康发展提供了技术支撑。
[1]周奎.一种新颖的智能型废品回收机的开发与设计[J]. 机电设备,2009,3.
[2]黄宗杰,王富东,杨春晖,马红卫. 一款分拣搬运机器人的设计[J].苏州大学学报(工科版),2010,2.
[3]颜伊庆,潘丽萍. 基于PLC 的自动分拣系统[J]. 机电工程,2011,11.
[4]黄崇莉,刘菊蓉. 分拣机械手设计[J]. 液压与气动,2010,12.
[5]吴清潇,欧锦军,都颖明,朱枫. 基于视觉的炼铁物料自动识别分类系统[J]. 仪器仪表学报,2011,6.
[6]庞明. 基于智能机械手的食品分拣系统运动规划研究[J]. 物流技术,2011,5.
[7]方勇纯.机器人视觉伺服研究综述[J]. 智能系统学报,2008,2.
[8]孙洪淋,孙炜,石玉秋,廖继旺. 基于参数自校正模糊控制器的机器人视觉伺服系统[J].微计算机信息,2007,9-2.
猜你喜欢
高中数理化(2024年8期)2024-04-24 16:58:14
北京汽车(2023年1期)2023-03-03 00:50:38
中学生数理化·高一版(2021年1期)2021-03-19 08:30:02
甘肃教育(2020年6期)2020-09-11 07:45:52
环球时报(2019-06-04)2019-06-04 06:16:10
铝加工(2019年3期)2019-02-05 00:34:20
中国信息技术教育(2018年12期)2018-07-12 05:09:38
机械研究与应用(2018年3期)2018-07-11 00:25:38
物理通报(2012年1期)2012-03-20 03:42:16
图学学报(2010年3期)2010-01-01 01:46:54
