
基于北斗定位系统的物流车载终端研究
2015-01-27 06:29滕志军张明儒郭素阳许建军
自动化与仪表 2015年10期
滕志军,张明儒,郭素阳,许建军
(东北电力大学 信息工程学院,吉林 132012)
随着我国经济的高速发展,物流行业迅速兴起,而与此同时,货物跟踪间断性明显,货物不能准确进行实时跟踪,尤其运输贵重物品或具有危险性物品时,使得在运输过程中物品丢失或有毒气体泄露,事发之后难以判定责任,这对国家和人民生活财产造成极大的威胁[1]。另外,传统的定位系统主要依赖于国外。针对上述问题,本文提出的物流跟踪体系采用北斗定位系统,不但能够全天候、高精度和快速提供导航定位和通信服务而且打破定位系统主要依赖于国外的局面。北斗定位系统可在车辆偏离预定路径、发生盗抢和出现交通事故等意外情况下,支持车辆位置及相关情况的报告,实现精确、有效的全过程运输监管[2]。高速发展的中国经济势必拉动物流产业的发展,借助北斗卫星定位优势,将极大促进现代物流业更加智能化、信息化、人性化、多功能化和集成化[3]。
1 北斗卫星定位系统简介
北斗卫星定位系统是我国正在实施的自主研发、自主运行的全球卫星定位系统。北斗卫星定位系统是采用主动式双向测距二维导航,地面中心控制系统解算,供用户三维定位数据,通常情况下,一个地区有6颗左右北斗卫星,但只有2颗北斗卫星进行实时定位。北斗卫星除具有定位功能外,还具有短报文通信功能。北斗卫星定位系统与GPS一样,也是由空间段、地面段和用户段3部分组成。空间段包括静止轨道卫星和非静止轨道卫星,地面段包括主控站、注入站和监测站等若干个地面站,用户段包括北斗用户终端以及与其他卫星导航系统兼容的终端。2000年,首先建成北斗导航试验系统,使我国成为继美、俄之后的世界上第3个拥有自主卫星导航系统的国家,如今中国的卫星研究取得了阶段性成果[4]。截止到2014年11月3日,我国一共成功发送了16颗北斗导航卫星。北斗定位系统三维定位精度10 m,测速精度0.2 m/s,授时精度10 ns。与美国GPS应用领域相类似,该系统已成功应用于测绘、电信、水利、渔业、交通运输、森林防火、减灾救灾和公共安全等诸多领域,产生显著的经济效益和社会效益[5]。
2 物流车载终端系统架构
车载终端设计的基本技术路线:北斗定位系统含有地理信息采集模块(GIS),用来采集物流运输车的实时位置信息,实时位置信息的数据帧经ARM处理器处理和存储,以3G无线通信网络为传输平台,将车辆实时定位信息传到物流调度中心,物流调度中心对收到的定位信息数据帧进行解析,及时将定位信息反馈给客户,同时将实时位置信息存储在SQLite数据库,方便以后查找。现代物流监控系统框架结构图如图1所示[6-7]。如果货物在运输过程中一旦丢失,行车轨迹回放后,可以方便用户和物流调度中心查找原因,收集证据,尽可能给用户减少不必要的损失。

图1 物流监控系统框架图Fig.1 Car terminal logistics framework map
3 硬件设计
物流车载终端以基于嵌入式Linux操作系统的ARM9为平台,融合北斗定位技术和3G无线通信技术,用于采集物流运输车的实时定位信息,定位信息数据帧$BDRMC经3G无线通信模块传输到物流调度中心。车载终端包括北斗定位模块(内含地理信息系统GIS)、3G无线通信模块、电源模块、存储器和外围电路等[8-10]。车载终端与物流调度中心之间的传输协议是TCP/IP,ARM通过串口通信接口UART1和UART2分别与北斗定位模块、3G无线通信模块进行通信。物流车载终端组成框图如图2所示。

图2 物流车载终端组成框图Fig.2 Block diagram of the logistics vehicle terminal
嵌入式主控模块ARM9采用S3C2440,该芯片是大容量片内存储器,它以3.3 V电压供电,低功耗,宽电压范围,自带视频设备驱动。它采用了被称为高级微控制器总线架构 (AMBA)的新的总线架构。16/32位RISC架构和以ARM920T CPU为核心的强大的指令集,增强ARM架构的MMU支持WinCE,EPOC32 和 Linux,指令缓存,数据缓存,写缓冲和物理地址TAG RAM性能,以减少主内存带宽和延迟的效果。嵌入式主控模块与北斗接收模块、3G通信模块之间采用异步串行通信,嵌入式主控模块分别通过监测UART1和UART2来接收北斗定位信息和3G无线通信模块的短信息收发。
北斗卫星定位模块采用麦宏科技设计的UM220-III N。UM220-III N采用片上SoC(system on chip)芯片,该芯片具有双系统、多频率、高性能、低成本、低功耗等优势,能够同时支持BD2 B1/GPS L1两个频点。可以在低功耗的情况下提供很高的灵敏度。能够在各种情况下选择适合的定位系统来方便自己定位。本模块包含地理信息系统(GIS)采集模块,物流运输车的实际位置信息都包含在帧$BDRMC结构中,有固定的格式规范。该模块波特率为 9600 b/s,数据位为 8 bit,停止位为 1 bit,无奇偶校验位,串口电压是TTL低电平3.3 V。
3G无线通信模块采用的是华为公司生产的MU509(UMTS/HSDPA 2100 MHz GSM/GPRS/EDGE 850/900/1800/1900 MHz)通讯模块,是双频WCDMA工业级无线模块,支持3.6 Mb/s下行速率;提供高质量的语音、短信功能,FOTA功能,内置TCP/IP协议栈,以及华为扩展AT命令集。工作电压范围为3.3 V~4.2 V,MU509有8个wire UART。采用标准RS232串行接口,支持语音数据以及短消息(SMS)的接收、发送以及对短信的管理,支持TCP/IP,UDP/IP,PPP protocol通信协议。嵌入式ARM微处理器可以借助3G无线通信模块强大的数据传输功能实时地进行信息处理。MU509的数据输入、输出接口实际上是一个串口,它可以与S3C2440中的串口直接相连接。
4 软件设计
4.1 调用Google Maps API
由于谷歌地图为开发人员设有地图接口函数,因此在Qt下可直接调用接口函数来显示地图信息。在Qt下,使用webkit组件和Google Maps API来实现显示物流运输车的实时位置信息的功能,在窗口中添加一个webview用于显示电子地图,调用setUrl()函数,setUrl(QUrl(“http://www.google.com”))。 用QThread实现多线程处理,通过串口UART1来接收北斗定位模块的数据帧$BDRMC,并加以解析,最终获得实时的经纬度定位信息。
4.2 系统总体设计流程
嵌入式Linux操作系统的ARM应用平台,来实现信息处理以及各个模块间的通信。系统体系结构分为:应用程序、设备驱动程序、嵌入式Linux内核。系统中的信息获取均采用中断方式进行,主程序只需要处理采集后的数据信息。系统总体流程图如图3所示。
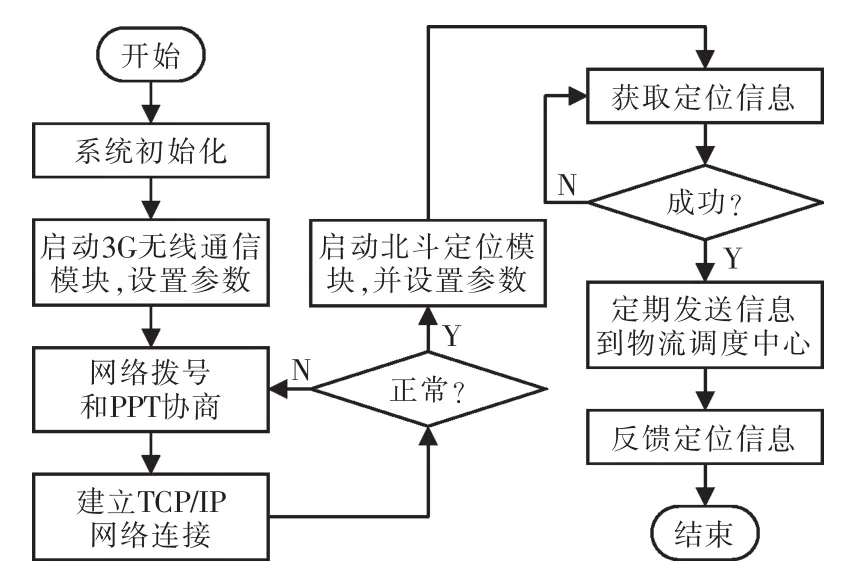
图3 系统设计流程图Fig.3 Overall system design flow chart
首先系统进行初始化,嵌入式主控模块通过调用串口分别与北斗定位模块和3G无线通信模块进行串行通信,调用AT指令启动3G无线通信模块并设置模块参数,网络开始拨号和PPT协商,车载终端与物流调度中心服务器建立网络连接。启动北斗定位并设置模块参数,程序通过中断方式提取物流运输车定位信息数据帧$BDRMC保存在缓冲器buffer中。北斗定位信息经3G无线模块传输到物流调度中心。物流调度中心检测收到的控制指令,如果指令符合协议规范,通过UART2来完成数据交换,对收到的定位信息数据帧加以解析,及时将定位信息反馈给客户。北斗定位模块主要使用的函数:

车载终端与物流调度中心的连接通过TCP/IP协议完成,类似于计算机网络通信里面的客户端与服务器端的通信方式(C/S模式),即“三次握手”,首先车载终端向物流调度中心发送请求,物流调度中心确认请求并且建立连接,这时车载终端才开始向调度中心发送定位信息的头文件,调度中心确认之后,开始发送文件体,最后车载终端请求断开连接,物流调度中心确认断开连接,这时数据交换过程才结束。
5 测试结果及分析
硬软件调试之后,定位系统从东北电力大学校园石头楼开始进行测试。系统在实际运营网络中进行了测试目标定位信息接收速率为1次/s,Qt界面以1 Hz频率实时更新物流车辆的经纬度信息。物流调度中心监视器选用装有Linux操作系统的笔记本电脑,Secure CRT远程控制Linux,波特率与北斗定位模块同为9600 b/s,使用面向对象程序设计的Qt显示物流车辆实时定位信息。Qt界面在Windows下显示,在石头楼附近接收到的数据帧为$BDRMC,110912.000,A,4349.303805,N,12629.796685,E,0.472,166.584,物流车辆轨迹实时记录卫星地图如图4所示。经过多次测试该系统,方案正确可行,系统稳定,Qt界面能够显示车辆位置信息,延时误差基本上是在2 s~5 s之间。由于物流运输车实际位置信息的传输是以3G为信息载体,在恶劣天气、放学时学生较为集中的地方和3G盲区,信号受到一定的干扰,会有一定的延迟。

图4 车辆轨迹实时记录卫星地图Fig.4 Vehicle tracks recorded in real time satellite map
6 结语
物流车载终端以ARM9处理器为开发平台,采用嵌入式Linux操作系统,选用北斗定位模块UM220-III来采集物流车的实时位置信息。车载终端经过设计和调试,具有加载Google Maps、显示经纬度定位信息和车辆轨迹实时记录等功能,系统运行稳定可靠,延时较小。下一阶段主要工作是降低系统检测延时,以适应高速行驶车辆的定位要求。
[1]张兵,李士宁,蒋思佳,等.基于WSN的危险品在途监测车载系统[J].计算机研究与发展,2011(48):332-327.
[2]Francesco Russo,Antonio Comi.A classification of city logistics measures and connected impacts[J].Procedia Social and Behavioral Sciences,2010(2):6355-6365.
[3]李德库.电子商务环境下的物流管理创新[J].中国流通经济,2013(8):39-43.
[4]Andrew S Erickson.China’s space development history:A comparison of the rocket and satellite sectors[J].Acta Astronautica,2014(103):142-167.
[5]Cai Ming.Road traffic noise mapping in Guangzhou using GIS and GPS[J].Applied Acoustics,2015(87):94-102.
[6]Huang Zechun.GPS vehicle positioning monitoring system integrated with CORS and mobile GIS[J].Procedia Environmental Sciences,2011(10):2498-2504.
[7]Adrian E.Facilitating multimodal logistics and enabling information systems connectivity through wireless vehicular networks[J].Int.J.Production Economics,2009(122):229-240.
[8]黄作维,周明,张喜梅.GPS/GPRS支持下的嵌入式车载终端的实现[J].计算机测量与控制,2009,17(11):2205-2208.
[9]康昊,谭秋林,秦丽,等.基于GPS的车辆安全监测系统[J].计算机测量与控制,2013,21(9):2406-2411.
[10]杨殿阁,连小珉,张涛,等.基于北斗卫星的车辆组合导航系统开发[J].清华大学学报:自然科学版,2008,48(5):856-859.
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
小哥白尼(神奇星球)(2022年3期)2022-06-06
家庭影院技术(2021年7期)2021-08-14
铁道通信信号(2020年8期)2020-02-06
当代陕西(2019年18期)2019-10-17
汽车维修与保养(2019年3期)2019-06-19
电子制作(2019年7期)2019-04-25
电子制作(2018年16期)2018-09-26
铁道通信信号(2018年2期)2018-04-18
中国公共安全(2017年11期)2017-02-06
