
基于模糊神经网络的起动机测试仪智能诊断系统
2015-01-27 06:29张墩利周国栋李庆镭
自动化与仪表 2015年10期
张墩利 ,周国栋 ,李庆镭
(1.中南大学 机电工程学院,长沙 410083;2.湖南广播电视大学 机电工程系,长沙 410004;3.国网天津城东供电公司,天津 300000)
智能故障诊断技术是指依靠先进的传感器技术和检测技术,采集系统各种具有特征性的动态数据,并对其进行处理、分析、区分和识别,确认异常表现,预测发展趋势,查明产生原因、发生部位及严重程度,并提出针对性的维修措施和处理方法[1-3]。汽车起动机性能自动测试仪在汽车工业中得到越来越广泛的应用[4],其主要结构如图1所示,采用电流和转速双环控制,由于其结构复杂、测试精度要求高,所以对设备的性能监控和故障诊断具有十分重要的意义。
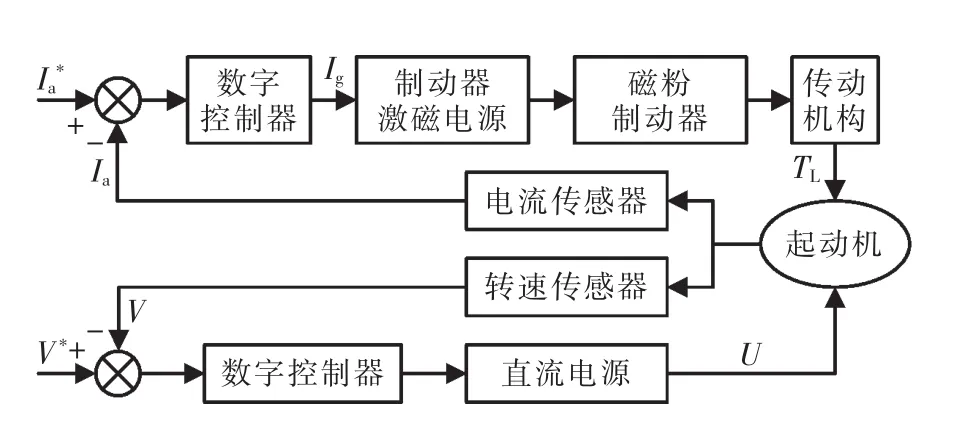
图1 起动机测试仪原理Fig.1 Diagram of starter testing system
传统基于规则的专家系统进行故障诊断时的主要缺陷在于存在着知识获取瓶颈、组合爆炸、无穷递归等难于解决的问题,且不具备联想和自学习功能。为了有效解决此类问题,本文针对起动机检测设备设计了一种基于模糊神经网络的故障诊断专家系统FNN-ES[5]。
1 系统总体结构
基于模糊神经网络的汽车发动机故障诊断专家系统FNN-ES充分利用专家系统ES和模糊神经网络FNN的特点,由ES负责逻辑处理,FNN负责数值计算,各部分工作相互独立而有机地结合在一起,整体系统结构如图2所示。

图2 模糊神经网络专家系统结构Fig.2 Structure of FNN-ES
FNN是模糊神经网络专家系统的核心,将其嵌入在ES中,FNN负责完成知识获取、推理等工作。
(1)知识获取。模糊神经网络具有自学习功能,能根据领域问题组织的训练样本而获得领域知识,这些知识将以连接权值的方式分布在网络各节点上(即知识库)。
(2)推理。训练后的神经网络负责对输入模式进行前向计算,其输出结果即推理结论。
ES则通过图形界面GUI与用户交互,实现系统信息的输入和输出,并对FNN的计算数据进行处理。
输入信息处理模块通过人机界面从用户那里获得有关的故障征兆现象,并转化为模糊神经网络可以接受的数据模式,送入神经网络。
输出信息处理模块则将FNN推理得出的结论通过人机界面向用户输出。基于模糊神经网络的故障诊断专家系统,结合了FNN和ES两者的优势,由专家系统来实现用户信息的处理,由模糊神经网络来实现知识的获取、存储和推理,不仅知识库大为缩减,实现了并行运算、推理速度快、容错性好,而且便于用户实际操作使用。
2 模糊神经网络
模糊神经网络结合了模糊逻辑和神经网络的优点。它既模仿人脑的逻辑思维模式,又模拟人脑神经元的功能;既可以表述具有模糊性质的问题,又具有强大的自学习和数据处理能力;既有强大的结构知识表达能力和自然语言分析能力,又具有较好的容错能力。利用模糊神经网络自身的分布式结构机制对知识进行隐式的表示,可以实现知识表示、存储和推理三者有机融合;在知识获取、并行推理、自适应学习、联想推理和容错能力等方面都表现出了明显的优越性。
基于模糊神经网络的起动机测试仪智能故障诊断专家系统,用模糊隶属函数来描述各故障现象,用神经元及其连接权值的分布表示故障的程度及分布,用特定的学习算法从训练样本中获取知识,系统分析机制不同于传统专家系统的知识匹配推理,只需要完成一组模糊数值计算,因此较好地克服了传统的采用符号的诊断专家系统存在的知识获取困难、知识存储容量与系统运行速度的矛盾以及知识的“窄台效应”等问题,能很好地完成起动机检测设备的故障诊断任务。
2.1 模糊神经网络的结构
根据上述模糊控制和神经网络的特点,构造模糊神经网络。首先基于模糊算法将输入的故障征兆信息模糊化(模糊化模块),目的是使神经网络的训练样本更精确;然后使用BP神经网络进行测试设备的故障诊断(ANN学习推理模块);最后清晰化故障诊断的结果(清晰化模块),其结构图如图3所示。

图3 模糊神经网络结构Fig.3 Structure of FNN
模糊神经网络由3个模块组成。
(1)输入模糊化模块。其任务是完成从抽象的特征信号到具体的网络输入之间的转化,即将故障征兆现象转化为以隶属度函数表示的模糊量集合。
(2)学习推理模块。 应用 BP(back propagation)神经网络完成从故障现象到故障原因的逻辑推理诊断过程。
(3)输出清晰化模块。完成神经网络的输出结果到诊断结论的去模糊化过程,即根据ANN输出向量数据的隶属度最终确定故障的原因。
2.2 基于模糊神经网络的起动机测试设备故障诊断
2.2.1 FNN的构建及训练仿真
根据起动机测试设备实验和实际维修经验,以及有关故障诊断方面的资料,对测试仪故障的表现,列出其故障程度的隶属度函数分布。
对于故障原因 (即y1表示起动机弹出机构故障;y2表示起动机线圈故障(短路或断路);y3表示起动机转速故障;y4表示起动机与传动机构齿轮啮合故障;y5表示直流电源故障;y6表示起动机转向故障;y7表示磁粉制动器故障;y8表示激磁电源故障)的存在程度,采用如表1所示的模糊范畴描述。
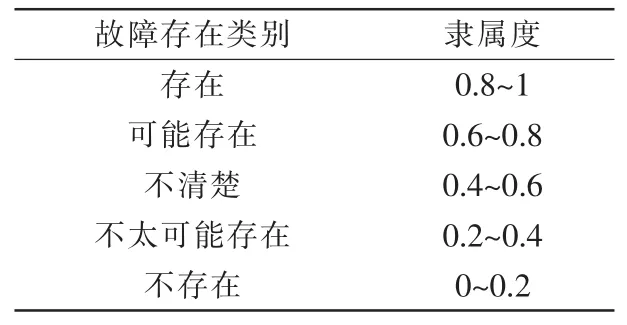
表1 模糊程度描述Tab.1 Fuzzy degree description
根据该领域专家的经验知识,作出表2所示的故障征兆和原因的对应关系(即模糊规则库),该规则库就是神经网络的训练样本。
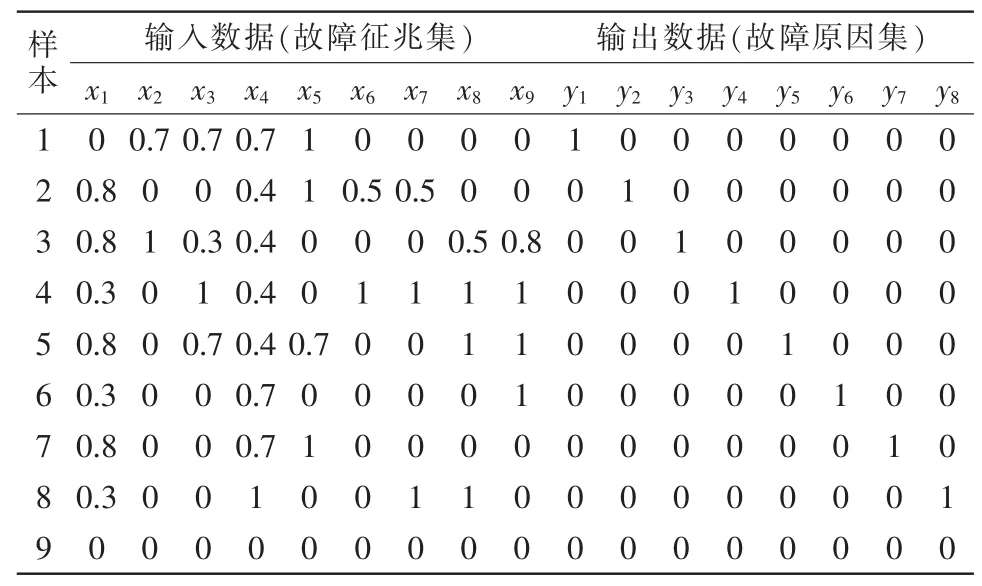
表2 起动机测试仪故障现象和原因的对应关系Tab.2 Relationship between starter tester failure phenomenon and reasons
对于表中模糊化了的训练样本集,采用结构简单的BP神经网络进行学习训练。确定网络结构为3层,输入层有9个节点,对应于9个故障现象;输出层有8个节点,对应于8个故障原因;隐含层的神经元个数结合网络的收敛性、仿真速度及精度的要求选取13个[6]。
使用快速BP收敛算法对神经网络进行训练。设定训练的目标误差平方和指标为0.001,最大循环次数为4000次,初始学习速率为0.01,动量常数取0.96。由于模糊逻辑的隶属度值是在[0,1]之间,因此各神经元的激活函数均取对数S型 (log-Sigmoid)函数[7],其将输入范围从(-∞,+∞)映射到(0,1),从而能与模糊逻辑很好地对接起来。模糊神经网络经过训练后的结果如表3所示,训练过程中的误差和学习率与训练次数的对应关系曲线如图4所示。可以看到,训练不到16次,误差就已满足要求,成功完成网络训练。

表3 网络仿真输出与目标输出的结果对比Tab.3 Comparison between simulation output and target output

图4 误差与训练次数的关系曲线Fig.4 Relationship between error and training times
2.2.2 应用FNN进行故障诊断
首先选择一个样本的输入,假设现有故障症状为

将其输入已训练好的模糊神经网络中,得到神经网络的输出为 Y=[0.0030;0.0000;0.0031;0.0005;0.9908;0.0000;0.0000;0.0009],采用最大隶属度方法进行清晰化,根据故障原因的隶属函数描述可知,存在y5所述的故障原因,即直流电源故障。与给定的样本输出数据比较,可知诊断完全正确。
再用一个新的非样本输入,来检测模糊神经网络的泛化和容错能力。设某测试仪的故障症状为

将待识别的故障数据X输入到已训练好的神经网络中并运行,可以得到神经网络的输出为Y=[0.0007;0.9864;0.0012;0.0003;0.0000;0.0001;0.0003;0.0022]
同样采用最大隶属度法对计算结果进行清晰化处理,根据故障原因的隶属函数描述可知,存在y2所述的故障原因,即起动机线圈故障。
将上述的非样本数据与样本数据输入作对比,再比较它们的诊断输出结果,可以看出FNN能够很好地完成起动机测试仪的故障诊断,诊断结果准确,容错能力强,且符合人们的思维习惯,具有较好的实用性。
3 专家系统的实现
将模糊神经网络作为专家系统的核心嵌入ES中,完成故障诊断的任务。而专家系统的符号处理功能则通过设计功能强大的可视化用户界面和数据库系统及相关的程序模块来实现。
本设计中的模糊神经网络是采用Matlab和VC2005联合编程开发的,用户界面如图5所示。用户界面上选择所见到的故障征兆,提交后系统就会将用户的信息转化为模糊神经网络所能辨识的数值信息,从而调用模糊神经网络故障诊断的程序,进行推理并得到诊断结论。对于图5的故障现象,用户不仅可以得到相应的诊断结果,还可观察到神经网络仿真运行时误差及学习率与训练次数的对应曲线,从而极大地方便了用户的操作使用。
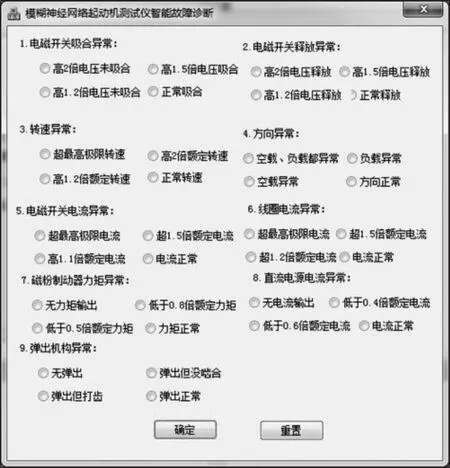
图5 专家系统的用户界面Fig.5 Interface of expert system
4 结语
本文针对起动机测试仪故障的模糊性、相关性、复杂性的特点,采用基于模糊神经网络的故障诊断专家系统作了一些初步的探讨。仿真结果表明,模糊神经网络用于该设备的故障诊断是可行的,其结合了神经网络和模糊逻辑的优点,推理速度快,泛化能力和容错能力强,结论表达准确,符合实际需要。
[1]Terje Brasethvik,Jon Atle Gulla.Natural language analysis for semantic document modeling[J].Data&Knowledge Engineering,2005,38(1):45-62.
[2]刘振兴.电机故障在线监测诊断新原理和新技术研究[D].武汉:华中科技大学,2004.
[3]李卫新.模糊Petri网在汽车故障诊断中的应用研究[D].西安:长安大学,2007.
[4]周国栋,张墩利.基于ADRC的起动机负载测试系统[J].自动化与仪表,2015,30(1):217-222.
[5]Zhang Cuiping,Yang Qingfo.Study on injection and ignition control of gasoline engine based on BP neural network[J].Chinese Journal of Mechanical Engineering(S0577-6686),2003,16(4):441-444.
[6]吕琼帅.BP神经网络的优化与研究[D].郑州:郑州大学,2011.
[7]高鹏毅.BP神经网络分类器优化技术研究[D].武汉:华中科技大学,2012.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
纺织标准与质量(2022年2期)2022-07-12
纺织标准与质量(2022年2期)2022-07-12
现代装饰(2020年7期)2020-07-27
铁道通信信号(2018年10期)2018-12-06
汽车维护与修理(2018年9期)2018-10-31
山东工业技术(2016年15期)2016-12-01
商(2016年28期)2016-10-27
汽车电器(2014年8期)2014-02-28
汽车与新动力(2014年3期)2014-02-27
