
半挤压式智能输液泵的设计与研制
2015-01-25 10:52李海云
电子设计工程 2015年8期
张 彬,李海云
(首都医科大学 北京 100069)
静脉输液通过静脉输入药液来向受体给药以达到治疗疾病的目的。传统吊瓶输液需保持输液器与受体液位差所提供的压力向受体输入液体[1]。所以在受体移动时输液十分不便利[2]。另外,普通输液器在输液过程中可能会出现气泡、阻塞、不能及时关断输液通路等故障造成不良后果。临床上静脉输液需要根据药物和患者年龄病情等配以适当的输液速度,而传统静脉输液依靠人工观察无法精确地控制输液速度,工作量大。因而本文设计并研制了一种半挤压式智能输液泵,它可以精确控制输液量和输液速度,并能够检测气泡、阻塞、输液完成,保证输液过程的安全性和可靠性。
1 输液泵原理
输液泵依靠外界机构挤压具有弹性的输液管来完成流速控制,按泵机构分类可以分为指状蠕动泵、盘状蠕动泵、弹性输液泵以及新近出现的活塞式输液泵等。指状蠕动泵和盘状蠕动泵都是靠步进电机带动挤压轮挤压输液管,使液体以一定的方向和速度流动[3-4]。弹性输液泵利用合成橡胶的弹性挤压作用把药液连续或间断地输入到人体。
本文研制的半挤压式智能输液泵原理上是一种活塞式输液泵,工作时由步进电机带动凸轮轴转动,使挤压滑块按照一定规律上下往复运动挤压输液管让药液以一定的速度定向流动,凸轮轴转速与流速基本呈线性关系。因此,控制凸轮轴的转速就可以精确控制药液流速。它无交叉污染,重量轻,定量准确,具有流速范围宽、输液管安装方便、使用简便等突出优点。半挤压式智能输液泵的外形如图1所示。
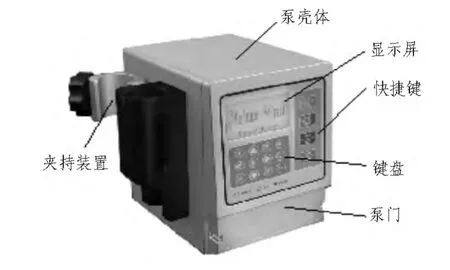
图1 半挤压式智能输液泵外形图Fig.1 The appearance of the infusion pump
2 输液泵结构设计
2.1 总体结构
活塞输液泵由泵体机械结构、控制硬件和控制软件三大部分组成。泵机构被各个控制硬件围绕,包括步进电机驱动单元、检测单元、人机交互单元和智能电池单元。步进电机是一个自带最大8细分脉冲分配驱动的步进电机驱动芯片。检测单元通过传感器等实现监测功能。人机交互单元配有液晶显示屏和键盘,实现用户与控制程序之间的人机交互。其机械结构简图如图2所示。
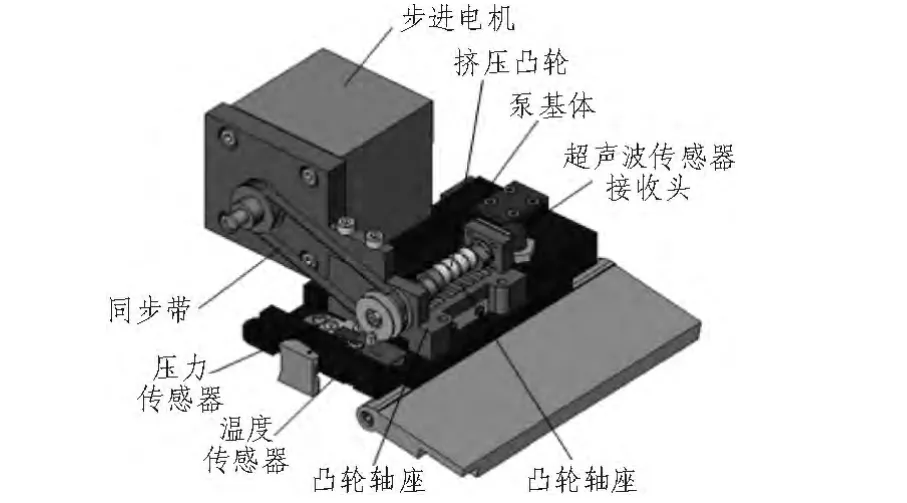
图2 输液泵机械结构简图Fig.2 The mechanical structure of the infusion pump
因而,本输液泵具有如下功能:精确测量和控制输液量;精确测量和控制输液速度;液流线性度好,产生脉动小;能对气泡、空液、漏液、温度和输液管阻塞等异常情况进行监报警,并自动关断输液通路;能够实现自动化控制,只要设定好运行参数,就可以自动根据参数进行输液。
2.2 驱动控制硬件
驱动控制硬件主要分为三大组成部分,即:
1)控制主板:以8bit单片机为核心,包括控制液晶屏、键盘等硬件等,完成人机交互界面,接收用户的指令信息,控制电机带动凸轮轴转动实现输液的流速要求,实现输液泵的主要控制功能。
2)传感器:包括检测气泡传感器、管路阻塞传感器、开关门传感器和温度传感器。开关门传感器是一个单簧管,用来实现泵门开关的检测。温度传感器用来检测药液温度。
3)步进电机驱动板:以A3977为核心,实现步进电机的斩波8细分驱动。
2.3 超声波气泡检测
输液管路气泡传感器使用超声波进行气泡检测。在两种不同的介质界面上,超声波的能量会被反射和透射,反射和透射的程度与介质的声特性阻抗有关[6]。由于输液管是圆柱形的,我们选用透过方式进行检测。没有气泡时,超声波换能器的发射端发出超声波大部分能量穿过输液管及药液到达接收端,转换成与发射频率同频的微弱电信号。如果输液管中有气泡,超声波会在气泡和液体的界面发生反射,使得能量有一部分衰减,微弱电信号就会减小,其程度及时间与气泡大小、形状和气泡多少有关[7]。因而超声波传感器可以检测出输液管路中的气泡。
2.4 管路压力传感器
输液泵的压力传感器实际上是一个典型的悬臂梁结构,其上贴有应变片组成电桥,以检测出悬臂梁的弯曲变化量。此悬臂梁的末端通过接触块儿与弹性输液管接触,接触后有一定的预压紧量。而后,当输液管中液体的压力变化时就会带动悬臂梁向上运动一个位移,应变片随即发生变化造成电桥平衡进一步打破,通过单片机的A/D口采集到此变化量,进而求得输液管路压力的变化。
2.5 控制软件
控制软件通过编程实现了流量—流速模式、容积时间模式、毫克体重模式等几种输液方式,以及流速标定、参数标定等功能。它是依据输液泵的操作流程设计的,各模块需要按照主控模块的控制来工作[8]。软件实现了处理用户键盘输入以及根据当前操作所处状态在LCD上显示相关信息等功能,图形用户界面可降低输液泵的使用出错率[9]。
整个软件流程从进入到某一选定的输液模式的参数输入界面后开始,在用户确认输入完输液参数后,程序内部自动计算,导出相关的参数,并根据输入的参数判断输入是否正确,不正确则重新输入,正确就开始按照计算出的参数驱动电机开始输液。在开始正常输液后,程序要不断的检测电池电量、管路温度、管路气泡、管路压力等,看是否有异常,若有则停止当前的输液过程,进入到异常处理的流程。输液完成与否通过实际的已用时间和理论的输液时间的大小来判断。当实际的输液时间大于或等于理论时间时,进入到输液完成处理流程,输液完成时,电机继续以较低速度转动,同时蜂鸣器响提示用户输液完成。软件流程图如图3所示。

图3 输液泵软件流程图Fig.3 The software flow chart of the infusion pump
3 输液泵流速控制
活塞式输液泵的输液流速精度与输液管的截面积、输液管弹性以及凸轮轴的转速等有关。挤压凸轮是一个偏心圆凸轮,它能使得挤压滑块以余弦规律挤压弹性输液管路。活塞式输液泵不会将输液管完全压扁,它的最大挤压位置距离极限位置1 mm左右,因而称这个输液泵是半挤压式的。
输液管被压缩后恢复形状需要一定的时间,当凸轮轴转速大于临界转速n0时,输液管的变形还没有完全恢复,滑块又开始挤压输液管,转速继续提高后每转的挤压液体量反而会降低。将输液管完全挤压后释放进行输液管回弹实验,结果表明输液管回弹时间Tr可以简化为0.1 s。因此凸轮轴的临界转速为:

理论上凸轮轴每转一周所挤压的液体量V=0.06 ml/r,则临界输液流速为:

在此流速下流速与凸轮轴的转速基本呈线性关系。
输液泵的凸轮轴是由步进电机进行驱动的,因而输液速度与驱动步进电机的脉冲频率有关。驱动脉冲信号用单片机定时器的定时中断功能产生,通过设定定时器初值可得到所需频率的驱动脉冲信号。步进电机的步距角为1.8°/step,因此凸轮轴转动一周需要微处理器8细分后发1 600个脉冲。单片机的定时器具有不同的分频,应当和电机的转速与精度相匹配[5]。经过一系列推导,不同分频时的流速上限Vm,x为不同分频时的常数,其单位为ml/h。计算结果为:

所以规划流速1分频时流速区间为20~1 200 ml/h,256分频时流速区间为0.1~20 ml/h。
4 测试实验与结果
将设计好的输液泵实际运行一定时间测量实际的流量,并计算出理论流量与实际流量进行比较,结果如表1所示。

表1 实验结果Tab.1 The experiment results
从实验结果可以看出,本文设计的半挤压式智能输液泵输液流速误差很小,流速控制精确,能够满足精度要求。
5 结 论
半挤压式智能输液泵能精确控制药液的输液量和输液速度,能对输液过程中出现的气泡等异常情况进行监测报警,同时及时自动关断输液通路。使用半挤压式智能输液泵避免了传统输液方式的诸多不便,可以大大减少人力资源的浪费。下一阶段将会对输液泵进行改进:功能上,要实现既可以静脉输液,又能输血、输送肠道营养液等;成本上,要降低压力输液器耗材的成本,这样才能使输液泵得到的更加广泛的应用。此外,在流速稳定性和噪声控制等方面也值得深入研究。
总之,半挤压式智能输液泵能有效防止输液事故的发生,有助于减轻医护人员的工作强度,提高安全性、精确性和工作效率,有广泛的应用前景,对输液泵的改进和完善对医疗事业的发展具有重要意义。
[1]李川,钟家琪,孙永奎,等.便携式输液设备的研制[J].医疗装备,2004(11):1-2.LI Chuan,ZHONG Jia-qi,SUN Yong-kui,et al.The development of the portable infusion apparatus[J].Medical Equipment,2004(11):1-2.
[2]刘枫,李林枫,庞青华.便携式电子输液器的研制[J].医疗卫生装备,2001(5):58.LIU Feng,LI Lin-feng,PANG Qing-hua.The development of portable electronic infusion set[J].Medical and Health Care Equipment,2001(5):58.
[3]Anon.Peristaltic pumps in OEM applications in the biotech and pharmaceutical sectors[D].World pumps,2004(4):2324.[4]Hartley,Frank T.Miniature peristaltic pump technology and applications[J].Journal of Advanced Materials,2000,32(3):1622.
[5]周强,于凤新,于守谦.智能输液泵流速控制方法研究[J].仪器仪表学报,2008,10(29):2163-2167.ZHOU Qiang,YU Feng-xin,YU Shou-qian.The research in velocity control method of intelligent infusion pump[J].Journal of Instrument and Meter,2008,10(29):2163-2167.
[6]Yamakoshi Y,Koshiba M,Ozawa Y,et al.Trapping of micrometer size bubbles by ultrasonic waves[J].Japanese Journal of Applied Physics,2001,40(3):1526-1527.
[7]李昔华.气泡监测的超声波传感器及其检测电路原理[J].重庆工商大学学报,2003,20(4):87-89.LI Xi-hua.Ultrasonic sensors of air bubbles monitoring and detection circuit principle[J].Journal of Chongqing Industry and Commerce University,2003,20(4):87-89.
[8]李宝连,王剑钢.基于单片机的智能输液泵的研制[J].仪器仪表用户,2005,6(12):47-49.LI Bao-lian,WANG Jian-gang.The development of intelligent infusion pump based on single chip microcomputer[J].Electronic Instrumentation Customer,2005,6(12):47-49.
[9]Noah S,David L,Robert A,et al.Graphical user interface simplifies infusion pump programming and enhances the ability to detect pump-related faults[J].Anesthesia and Analgesia,2012,115(5):1087-1097.
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
临床护理杂志(2021年6期)2022-01-05
中国医疗器械信息(2020年16期)2020-09-13
汽车维修技师(2018年6期)2018-11-06
中国医学装备(2018年10期)2018-10-29
畜牧兽医科技信息(2016年12期)2016-02-23
中国机械工程(2015年13期)2015-12-16
发明与创新·中学生(2015年11期)2015-11-30
中国医疗设备(2015年11期)2015-06-01
汽车与新动力(2014年2期)2014-02-27
