共形阵列信号DOA和极化状态联合估计研究∗
2015-01-23 02:48李杰然
雷达科学与技术 2015年2期
李杰然,许 稼
(1.中国人民解放军92785部队,河北秦皇岛066200;2.北京理工大学信息与电子学院,北京100081)
0 引言
共形阵列是一种与载体表面共形的天线阵列。一般来说,共形阵列具有安装简化、波束扫描范围广、RCS小等优点[1-2]。目前,现代飞机、导弹、卫星等设备均要求采用共形阵列天线。因此,共形阵列的相关研究已受到广泛关注。从阵列信号处理角度讲,参数估计问题是共形阵列的主要问题之一。共形阵列多采用极化可控阵元,具有极化敏感阵列的特点。因此,国内外学者围绕共形阵列的优势,在共形阵列波达方向估计(Direction of Arrival,DOA)和极化状态估计方面做了一些研究工作[3-10]。比如文献[3]以圆柱共形阵列为例,采用多维MUSIC谱估计方法实现了DOA和极化状态的联合估计,但其需要多维谱峰搜索,运算量大,不适用于工程实际;文献[4-6]通过合理划分阵列使其满足旋转不变结构,从而实现柱面阵列和锥面阵列的DOA和极化状态联合估计。但其方法不能适用于其他共形阵列,且需要多次特征值分解和参数配对。可以说,关于共形阵列DOA和极化状态估计问题还有许多值得深入研究的工作。本文采用时空处理方法对阵列接收数据进行处理,可以降低参数估计对阵列形状的限制和抑制了噪声。利用数据极化特性,构造DOA矩阵,仅需一次特征值分解即可实现共形阵列DOA和极化状态的联合估计,且参数自动配对,运算量小。
1 阵列结构与数据模型
共形阵列没有具体的阵列形状,这里为了体现算法普适性,采用结构任意的阵列,如图1所示。阵元数为N,第n个阵元的坐标为(p nx,p ny,p nz)。

图1 阵列模型
有3个不共线的阵元p0,p1和p2,其位置已经校准,设p0位于坐标原点,p n(0≤n≤N-1)表示第n个阵元的位置矢量,则有
假设有K个已知载频为ω0,波长为λ的不相关窄带信源s1(t),s2(t),…,s K(t)入射到阵列,其入射角分别为{(θ1,ϕ1),(θ2,ϕ2),…,(θK,ϕK)},极化状态为{(γ1,η1),(γ2,η2),…,(γK,ηK)}。为了避免多值,这里0≤γk≤π/2;0≤ηk≤2π(1≤k≤K)。设每个阵元的极化辐射方向图相同,但对于曲率较大的共形阵列而言,各阵元实际接收数据时会有所不同。可以参考文献[11]采用的方法,记为第n个阵元俯仰向实际接收方向图;为第n个阵元方位向实际接收方向图。
第n个阵元的输出为

式中,xφn为方位向接收数据,xθn为俯仰向接收数据,u为考虑信号极化状态后的φ和θ方向的极化系数矢量:

g n(k)为第n个阵元实际接收方向图:

s k(t)为第k个入射信号其中|E k|为幅度,Ψk为[0,2π]内均匀分布的初始相位,r k为第k个信号的传播矢量:

n n(t)为加性噪声矢量,其均值为零,且各阵元间互不相关。
2 DOA和极化状态联合估计
定义阵元p0方位向接收数据与各阵元方位向接收数据的相关函数为

定义阵元p0方位向接收数据与各阵元俯仰向接收数据的相关函数为

由式(2)可知

写成矩阵形式如下:


可以看出,其数据具有旋转不变结构。类似于对阵列输出作快拍采样,对Rφφ(τ)和以时间延迟τs(τs=Ts,2Ts…,NT,Ts≤2π/ω0s)为单位进行M(M≥K)次采样,得到2N×M维的“伪快拍矩阵”:

式(15)和式(16)可以分别写成

式中,S=[Rs(Ts),Rs(2Ts),…,Rs(NTs)]。
[12],定义“时空DOA矩阵”为

式中,[·]-表示伪逆,

由文献[12]可知,对时空DOA矩阵RTS特征分解,可以得到Φ和A的估计。设特征分解得到的导向矢量A第k列的估计。设阵元p1和p2位置已经校准,那么可以利用对应阵元p1和p2的导向矢量计算信源入射角度,即对以下方程组求解:

将算法步骤归纳如下:
(1)选出3个不共线的校准阵元p0,p1和p2;
(2)作时空处理得到Rφφ(τ)和Rθφ(τ);
(3)由式(18)和(19)得到伪快拍采样数据矩阵Rφφ和Rθφ;
(4)按照式(22)构造时空DOA矩阵为RTS;
(5)对时空DOA矩阵RTS特征分解,由式(24)、(25)和(26)估计信号角度和极化状态。
3 仿真实验
实验1 采用如图2所示的17阵元的圆台阵共形阵列,圆台顶层半径R=λ/4,圆台底角为60°。共分4层,两层阵元间距每层阵元等角度分布,其相邻阵元夹角为30°。阵元采用极化全向阵元[11],即
式中,J0(·)和J2(·)分别为零阶和二阶第一类贝塞尔函数,ε为由天线阵元位置和工作状态决定的可变参数,取ε=0.5。

图2 圆台共形阵列
设有2个频率为f0的空间窄带信号源入射到阵列,其参数(θ,φ,γ,η)(其中θ代表俯仰角,φ代表方位角,γ代表极化振幅比参数,η代表极化相位描述参数)为(30°,40°,30°,40°)和(35°,50°,40°,50°),信噪比(SNR)均为20 dB,采样快拍数为500,伪快拍数为50,作50次蒙特卡罗仿真实验。图3和图4分别给出了二维角度与极化状态的估计结果。

图3 二维角度估计结果

图4 极化状态估计结果
从图3和图4可以看出,本文提出的算法可以估计出信源的二维角度与极化状态。算法对阵列形状要求低,只需有3个已校准不共线阵元即可。为了避免求解角度时的多值问题,还需3个阵元间隔小于半个波长。
实验2 阵列与信源设置同实验1,采用500次快拍和50次伪快拍,进行50次独立实验,图5给出了2个信源二维角度估计结果的均方根误差(RMSE)随信噪比的变化曲线,图6给出了信源极化状态估计结果的均方根误差(RMSE)随信噪比的变化曲线。
定义信源k的二维角度估计的均方根误差为

定义信源k的极化状态估计的均方根误差为

由图5和图6可以看出,随着SNR的增加,算法估计的均方根误差逐渐减小,估计的精度逐渐提高。

图5 二维角度估计结果的RMSE随SNR变化曲线
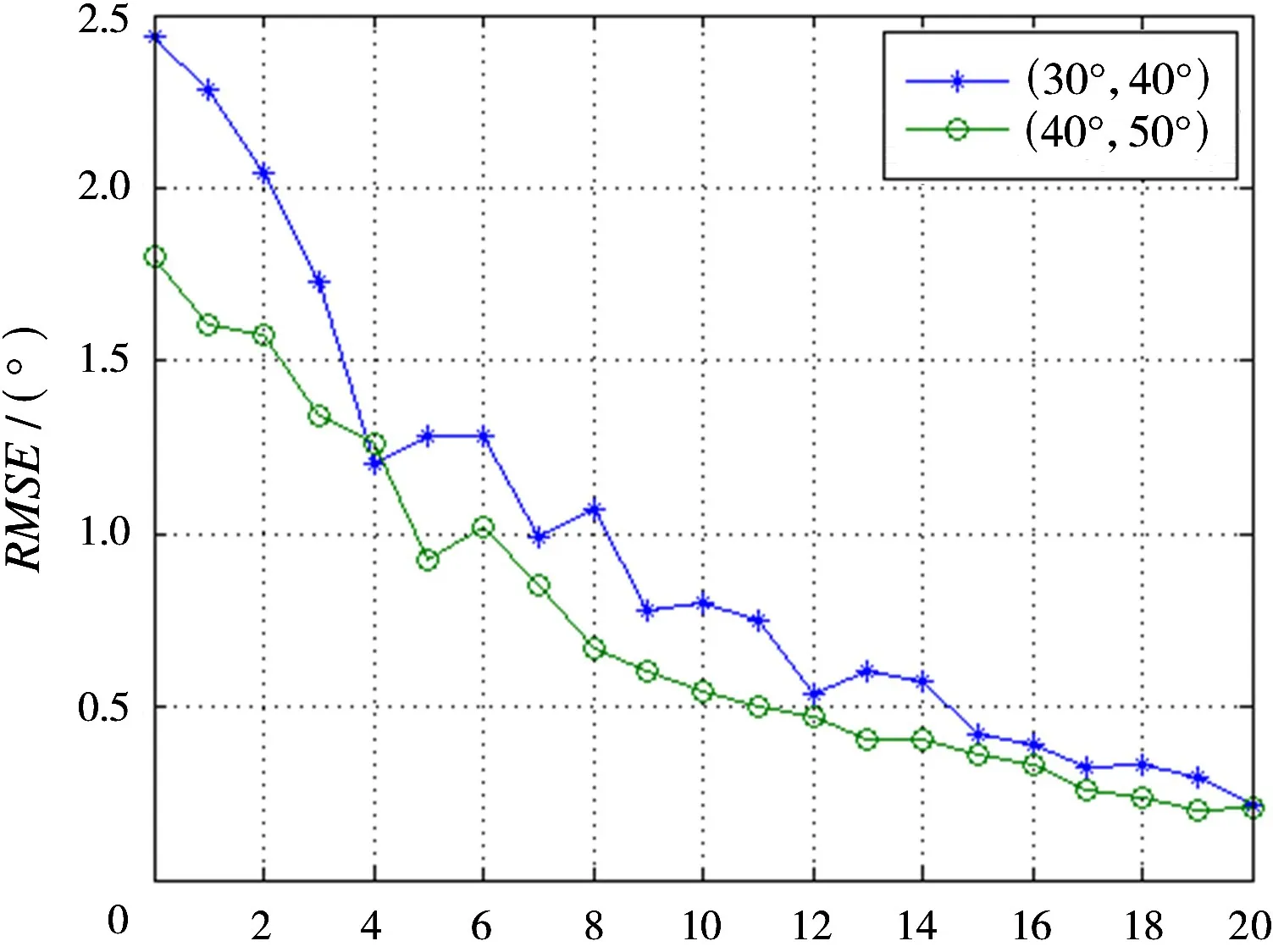
图6 极化状态估计结果的RMSE随SNR变化曲线
实验3 阵列与信源设置同实验1,信噪比为20 d B,采用50次伪快拍,进行200次独立实验,图7给出了2个信源二维角度估计结果的均方根误差(RMSE)随采样快拍数的变化曲线,图8给出了信源极化状态估计结果的均方根误差(RMSE)随采样快拍数的变化曲线。
由图7和图8可以看出,随着采样快拍数的增加,算法估计的均方根误差逐渐减小,估计的精度逐渐提高。
4 结束语
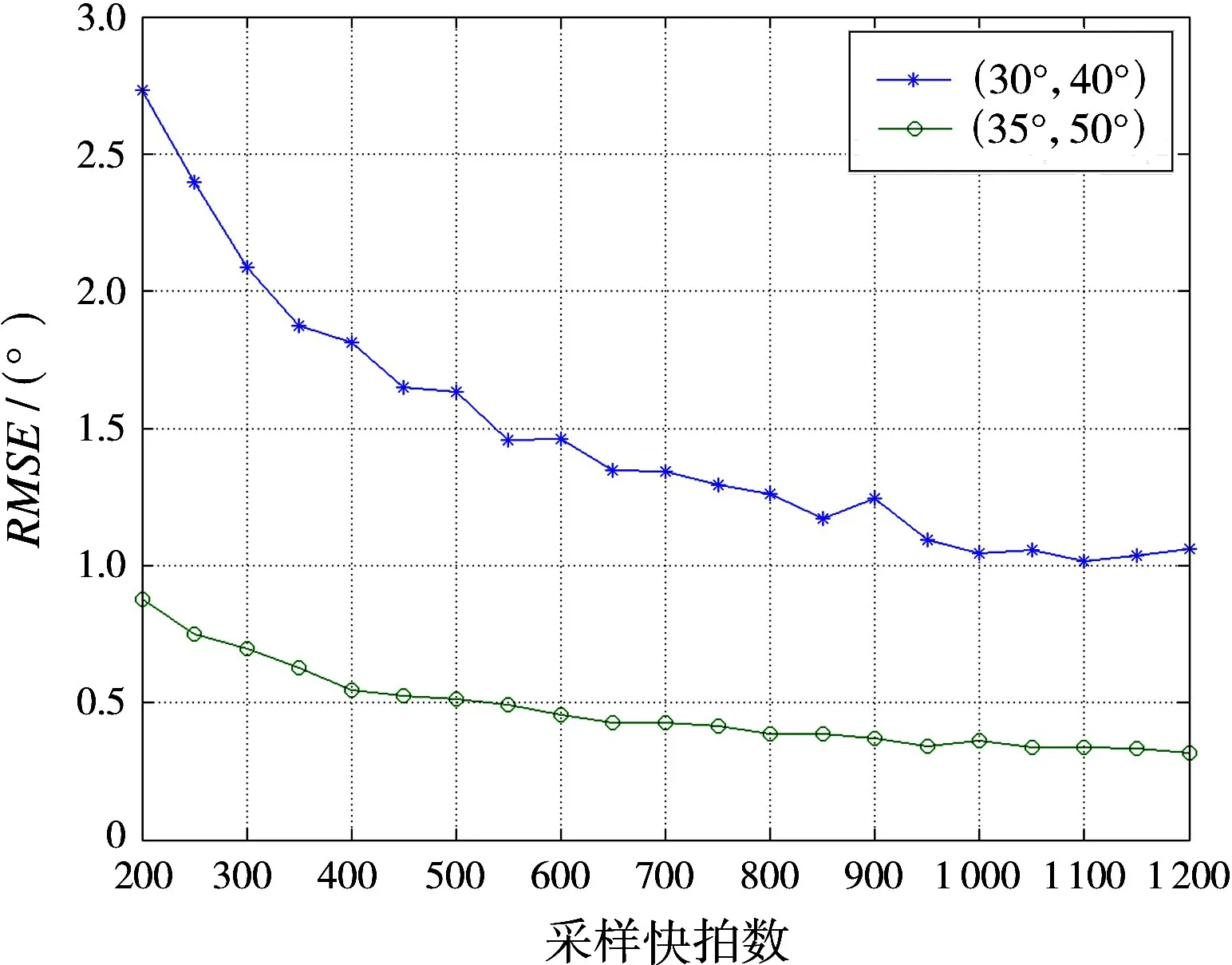
图7 二维角度估计结果的RMSE随采样快拍数变化曲线
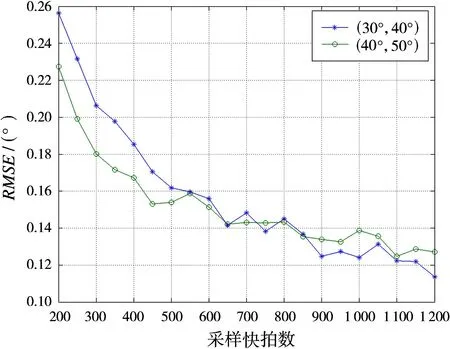
图8 极化状态估计结果的RMSE随采样快拍数变化曲线
本文提出了基于极化接收数据构造时空DOA矩阵的共形阵列二维DOA和极化状态联合估计算法。时域处理降低了算法对阵列形状的限制,抑制了噪声的影响。利用时空DOA矩阵方法只需一次特征值分解即可得到二维DOA和极化状态的联合估计。算法无需谱峰搜索和参数配对,计算量小。另外,算法也有其约束条件,需要具有3个已校准不共线阵元,同时要求3个阵元间隔小于半个波长。最后,以圆台共形阵列为例,通过仿真实验对算法有效性进行了验证。
参考文献:
[1]余鹏程.基于宽带共形天线的若干阵列信号处理算法研究[D].成都:电子科技大学,2013.
[2]ZOU Lin,LASENBY J,HE Zishu.Pattern Analysis of Conformal Array Based on Geometric Algebra[J].IET Microwave Antennas&Propagation,2011,5(10):1210-1218.
[3]彭文灿,魏江,瞿颜,等.柱面共形阵列天线的极化——DOA估计[J].计算机仿真,2013,30(9):173-176.
[4]郭英,高梅,张树银,等.基于旋转不变子空间原理的共形阵列DOA与极化状态联合估计[J].上海交通大学学报,2013,47(7):1137-1142.
[5]ZOU Lin,LASENBY J,HE Zishu.Direction and Polarisation Estimation Using Polarised Cylindrical Conformal Arrays[J].IET Signal Processing,2012,6(5):395-403.
[6]YANG P,YANG F,NIE Z P.DOA Estimation with Sub-Array Divided Technique and Interporlated Esprit Algorithm on a Cylindrical Conformal Array Antenna[C]∥Progress In Electromagnetics Research,[S.l.]:[s.n.],2010:201-216.
[7]齐子森,郭英,王布宏,等.基于四阶累积量的共形阵列波达方向估计算法[J].电波科学学报,2011,26(4):735-744.
[8]张树银,郭英,齐子森.锥面共形阵列信源方位和极化参数的联合估计算法[J].电子与信息学报,2011,33(10):2407-2412.
[9]SI W,WAN L,LIU L,et al.Fast Estimation of Frequency and 2-D DOAS for Cylindrical Conformal Array Antenna Using State-Space and Propagator Method[C]∥Progress In Electromagnetics Research,[S.l.]:[s.n.],2013:51-71.
[10]林文凤,周晓青,甘露,等.一种可自动配对的二维波达方向估计算法[J].雷达科学与技术,2013,11(1):33-39.LIN Wen-feng,ZHOU Xiao-qing,GAN Lu,et al.An Automatic Pairing Method for 2-D Direction of Arrival Estimation[J].Radar Science and Technology,2013,11(1):33-39.(in Chinese)
[11]王布宏,郭英,王永良,等.共形天线阵列流形的建模方法 [J].电子学报,2009,37(3):481-484.
[12]金梁,殷勤业.时空DOA矩阵方法[J].电子学报,2000,28(6):8-12.
猜你喜欢
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
无线电工程(2022年4期)2022-04-21
环境技术(2022年1期)2022-03-21
科学与生活(2021年17期)2021-11-10
北京航空航天大学学报(2021年9期)2021-11-02
雷达科学与技术(2020年1期)2020-03-28
飞天(2019年6期)2019-07-08
火力与指挥控制(2019年1期)2019-06-15
航天电子对抗(2019年4期)2019-06-02