雷达通信一体化系统通道间时延影响分析∗
2015-01-23 02:47
雷达科学与技术 2015年2期
(中国电子科技集团公司第三十八研究所,安徽合肥230088)
0 引言
雷达和通信是武器平台广泛配备的两种电子系统,雷达通信系统一体化可以在有限的平台体积和孔径资源下实现多功能多任务要求,对提高武器平台的作战效能具有重要军事意义,同时对传感器网络的发展也有重要作用[1]。
就采用数字相控阵体制的雷达通信一体化系统而言,雷达、通信共信号波形和共射频前端,通道包含了从天线单元至波束形成输入端口在内的整个完整馈电链路,通道时延通常由单元阵外时延和阵内时延组成[2-3],单元分布位置不同、互连电缆长短不一、同型号元器件性能差异等导致通道间时延出现不一致。系统信噪比恶化影响因素除通道间幅相不一致外还有通道间时延不一致,阵面口径越大或馈电链路越长或瞬时信号带宽越宽,时延不一致引起的信噪比恶化量越严重[4],因此数字相控阵体制雷达通信一体化系统需进行通道间时延不一致的影响分析,为工程实现提供设计依据。
1 数学模型
典型的数字相控阵体制雷达通信一体化系统组成如图1所示。

图1 数字相控阵雷达通信一体化系统组成
假设采用扩频技术,信号波形为完全互补伪随机码,通信方式为基于数字空码分联合多址的猝发通信,同时支持10个用户,调制方式为QPSK,且第u个用户的I分支对应功率、数据和PN码分别为a u,d u,I,和PN u,I(t),Q支路对应功率、数据和PN码分别为b u,d u,Q和PN u,Q(t)[5-6],则该用户发射信号可表示为
式中,A u,θu和φu(t)分别为第u个用户的通道幅值、载波初相和调制相位。

第k个接收单元输出信号为

式中,G u,k,δu,k和ϕu,k分别为第u个用户到达第k接收单元的接收增益、阵外时延和载波相位。
第k个接收单元对应的接收通道A/D输入信号可表示为

式中,δk和ψk分别为各用户通过第k通道(从馈线输入到A/D输入)的阵内时延和载波相位。
收发同步后,经过数字下变频后同相输出信号为

式中,通道时延τk=δu,k+δk(δu,k为第u个用户到达第k个接收单元的阵外时延,δk为用户通过第k个通道的阵内时延),Ts为采样时钟,m为整数,代表样本序号。
比较收发信号的数字表达式可以看出:发射信号经过传输后,调制信号被附加了通道时延τk,同时载波信号幅度出现失真并被附加了额外相位ϕu,k+ψk。
考虑通道增益,第k个通道接收信号可写成:

式中,A k为第k个通道的增益。
式(7)中的φu(m Ts-τk)是由调制相位φu(t)附加上通道时延τk并经数字化变来,时域上表现为调制数据过零点出现偏移(大小等于τk)。
由于单元位置不同、互连电缆长短不一、同型号元器件性能差异等,通道时延τk值各不同,对应调制数据过零点也不同[7],空分处理时这种时延不一致性直接恶化系统的信噪比。
2 通道间时延不一致性影响分析
为了便于分析,假设:①空分处理采用数字波束形成(Digital Beam Forming,DBF);②通道间时延一致情况下用户0为期望用户,采用开环频域FFT算法后非期望用户抑制大于13 d B,低信噪比下近似认为非期望用户等效为噪声干扰;③假设有32个天线单元,对应32个收发通道,各通道时延τk不等,为分析简单,假定时延依次递增且相邻通道间时延差固定为Δτ。
在以上假设条件下,当通道间时延一致且等幅加权时空分处理后输出信号为

式中,τ为通道绝对时延,Δθ为DBF处理残余相位,n″(m Ts-τ)为DBF后输出噪声加干扰。由此可见,通道间时延一致时空分处理性能无影响。
当通道间时延不一致(见假设条件③时,空分处理后输出信号为
由式(9)可以看出:通道间时延不一致时,如果空分处理前不进行时延均衡而直接进行DBF处理,则相当于通道1的信号通过一冲激响应为H(Z)=1+z-1+…+z-31的滤波器,对应频率响应为

工程实现中通道间时延差通常不满足假设条件③,为了便于比较,不妨假设通道间时延差的最小分辨单元为Δδ,这样各通道时延可表示为值得注意的是此时n不一定是整数,各通道相应n不妨取[0 0.5 0.7 1.2 0.4 1.8 0.8 3.0 2.1 2.1 0.2 0.6 1.2 1.8 3.2 0.8 1.8 2.1 0.6 0.9 1.0 1.0 3.5 2.1 1.0 1.8 0.2 0.4 0.9 3.1 2.1 3.0],这样空分处理后输出信号为
比较式(9)和式(11)可知:此时DBF输出信号相当于通道1的信号通过冲激响应为H(Z)=1+2z-0.2+2z-0.4+z-0.5+2z-0.6+z-0.7+2z-0.8+2z-0.9+3z-1.0+2z-1.2+4z-1.8+5z-2.1+2z-3.0+z-3.1+z-3.2+z-3.5的滤波器。
H(Z)表达式中,z的幂级数并不是整数,仿真时可以通过改变上采样率将z的幂级数变为整数。设上采样时间为0.1·Δδ,则H(Z)的表达式变为

系统等效模型为

式(12)对应的等效滤波器幅相特性如图2所示。

图2 通道间时延不一致等效幅相特性
从该等效滤波器的幅频和相频特性可以看出,其幅相非线性对信号影响较大。
综合以上所述:当通道间时延不一致性时,空分处理前不进行时延均衡而直接进行DBF处理,则输出信号出现失真,恶化系统误码性能。
3 仿真分析
根据以上分析模型,在Simulink中构建的仿真模型如图3所示。
仿真模型中,第一个采样保持器的采样时间为0.1·Δδ,构建滤波器的冲激响应如式(12)所示,用以模拟32个时延的不一致性,最后以信噪比恶化量来衡量通道间时延不一致性对空分处理信号的影响。
仿真采用了QPSK调制,其中成型滤波器因子为0.875,信号传输带宽为6 MHz,Δδ取值为0.2Ts,Ts为符号宽度,通道间时延不一致对空分处理影响的仿真结果如表1所示。
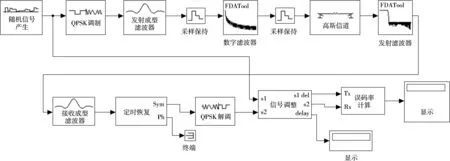
图3 通道间时延不一致对系统性能影响的仿真模型

表1 误码率仿真结果
由此可见:1)通道间时延不一致会恶化信噪比,理论上Eb/N0为10.6 dB时对应的误码率为10-6,通道间时延不一致影响后误码率为10-2,对应的信噪比恶化5~6 dB;2)提高发射端或解调输入信噪比而不进行时延均衡,改善不了系统的误码性能。
由此可见,工程实现时必须在空分处理前消除通道间时延不一致,即设计时延估计和均衡方案,将通道间时延不一致控制在可接受范围,保证系统性能满足要求。
4 结束语
通道间时延不一致是数字相控阵体制雷达通信一体化系统在进行空分处理时面临的新难题,阵面口径越大或馈电链路越长或瞬时信号带宽越宽,通道间时延不一致引起的信噪比恶化量越严重,工程实现时需结合阵面布局、通道特性和信号带宽进行时延不一致的影响分析与仿真,在对系统性能有影响的情况下需设计时延估计和均衡方案,保证系统性能满足要求。
[1]胡飞,崔国龙,孔令讲.雷达 通信一体化网络设计[J].雷达科学与技术,2014,12(5):455-459.HU Fei,CUI Guo-long,KONG Ling-jiang.Network Design of Integrated Radar and Communication System[J].Radar Science and Technology,2014,12(5):455-459.(in Chinese)
[2]TAVIK G C,HILTERBRICK C L,EVINS J B,et al.The Advanced Multifunction RF Concept[J].IEEE Trans on Microwave Theory and Techniques,2005,53(3):1009-1020.
[3]RUSSELL M E.Future of RF Technology and Radars[C]∥IEEE Radar Conference,Boston,MA:[s.n.],2007:11-16.
[4]VAN ROSSUM W L,DE WIT J J M,OTTEN M P G,et al.SMRF Architecture Concepts[J].IEEE Aerospace and Electronic Systems Magazine,2012,26(5):12-17.
[5]李晓柏,杨瑞娟,程伟.多相伪随机序列在雷达通信一体化中的应用[J].信号处理,2012,28(11):1543-1546.
[6]杨瑞娟,陈小民,李晓柏,等.雷达通信一体化共享信号技术研究[J].空军预警学院学报,2013,27(1):39-43.
[7]AVANT R.STGT Multiple Access Beamforming System Modeling and Analysis[C]∥Military Communications Conference,San Diego,CA:IEEE,1992:1028-1034.
猜你喜欢
中氮肥(2022年1期)2023-01-03
现代仪器与医疗(2022年1期)2022-04-19
通信电源技术(2020年8期)2020-07-21
探索科学(学术版)(2020年1期)2020-03-26
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年23期)2019-02-23
能源研究与信息(2018年2期)2018-12-08
雷达学报(2017年3期)2018-01-19
现代防御技术(2016年1期)2016-06-01
中国科技纵横(2015年14期)2015-12-10