
车载雷达架设控制系统集成设计
2015-01-22 09:35
雷达科学与技术 2015年6期
(中国电子科技集团公司第三十八研究所,安徽合肥230088)
0 引言
车载雷达自动架设主要包括自动调平、天线自动举升[1]。车载雷达自动架设系统按照功率源可分为液压式和机电式两种,液压式自动架设系统的特点是载荷大、成本高、维护复杂,主要用于大型雷达系统;机电式自动架设系统的特点是载荷较小、成本较低、维护简单,主要用于小型雷达系统。本文所设计的是用于小型雷达系统的机电式自动架设控制系统。
传统机电式雷达自动架设控制系统主要由PLC、伺服驱动器、伺服电机和水平仪等组成[2],这种架构可以选购成熟的工业货架产品,具有技术成熟、成本低等优点,但是同时也存在控制系统体积大、布线复杂、温度适用性差等缺点,需要作筛选或温度适用性改进。这些缺点在大型雷达系统里往往容易解决,但在小型紧凑型雷达系统里往往影响就比较突出,给紧凑型雷达结构设计带来很大的压力。为了适应小型雷达系统设计,亟需对雷达自动架设控制系统进行小型化设计。
本文针对自动架设系统的特点,对自动架设系统的撑腿和背架撑杆电机采用提高驱动电机的功率密度和控制驱动一体化设计的方法进行了高集成设计。同时,主控制系统摒弃了传统的PLC控制模式,采用以DSP为核心的印制板设计方式,实现了主控系统的小型化集成设计。
1 机电式自动架设系统组成
机电式自动架设系统主要由控制器、伺服电机驱动器、伺服电机、水平仪、俯仰编码器、键盘、显示器和限位开关等组成,如图1所示。

图1 自动架设系统组成框图
传统撑腿和背架撑杆的驱动器和电机采用成熟的工业伺服,控制器采用PLC,这种架构的优点是技术成熟、成本低,但也存在体积尺寸大、布线负载的缺点,并且由于采用的是工业伺服还要进一步作环境筛选或环境适应性改进。这些缺点在小型雷达系统里甚至会成为结构设计的一大难题。
同时,自动架设系统存在一些固有特征,一是工作时间短,高机动雷达的架拆动作时间都在5 min以内;二是电机功率不大,现有高机动雷达的撑腿电机和背架撑杆电机一般在800 W左右。以往这些电机选用工业伺服电机,工业伺服电机大多都是按照长时工作制设计的,并且工业伺服电机需要考虑不同场合的通用性,余留丰富的接口。这样伺服电机驱动器做得就比较大,增加了自动架设系统的体积重量。
鉴于自动架设系统以上的两个特点,本文把驱动电机按照短视工作制进行设计,这样电机的体积重量就会小很多。同时,为了进一步集成设计,本文把驱动器直接集成到驱动电机尾部,电机通过RS485串口总线和控制器通信。
2 驱动电机设计
伺服电机主要有永磁直流电机、永磁同步电机和无刷直流电机三类,永磁直流电机调速简单,但由于电刷的存在严重制约了电机寿命,特别对于高压电机,电机寿命更是大幅度降低[3];永磁同步电机具有精度高、寿命长的优点,但是其控制算法复杂,常用在精密伺服领域;无刷直流电机具有寿命长、算法简单的优点,但转矩脉动的存在制约了无刷直流电机的控制精度,常用于对控制精度要求不是很高的伺服领域[4]。
本文的雷达架设系统对电机的控制精度要求不是很高,为了提高架设系统的可靠性,简化控制算法,驱动电机采用无刷直流电机,无刷直流电机驱动器套轴安装在电机本体尾部。为了减小控制电路的电源压力,无刷直流电机的控制电源采用24 VDC输入,驱动电源采用220 VAC整流后的320 VDC输入。为了与传统撑腿和撑杆匹配,无刷直流电机的额定速度为3000 r/min,并且输出轴及法兰接口相同。为了防止停机时,受重力作用电机反转,电机尾部增加电磁制动器。电机按照短时工作制设计,重量仅为传统伺服电机重量的1/3左右。无刷直流电机结构示意图如图2所示。
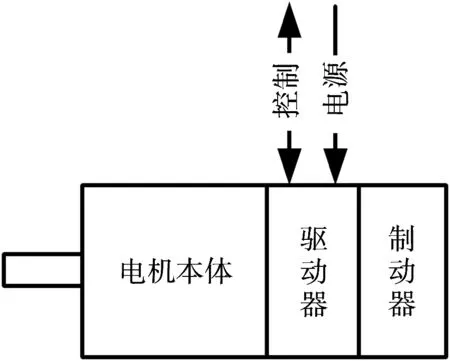
图2 无刷直流电机结构示意图
3 无刷直流电机驱动器
无刷直流电机驱动器通过RS485串口接收主控制器发生的控制指令并驱动无刷电机正反运转,同时把电机的转速、电机状态通过RS485串口反馈给主控制器。无刷直流电机驱动器扩展有2路24 V开关量输入接口和1路制动器控制接口,这样撑腿或撑杆的限位开关和制动器就可以就近接入到无刷直流电机驱动器上,简化线缆布线,进一步,制动器的控制线直接通过内部焊接在无刷直流电机驱动器上。电机转子位置通过安装在驱动印制板上的3个霍尔传感器获取,并且通过软件差分计算出电机转速。
无刷直流电机驱动器的原理框图如图3所示。
由于电机驱动器要集成在无刷直流电机尾部,这就必然要求电机驱动器体积小、集成度高。为了简化系统架构,DSP芯片选用TI公司针对电机控制领域开发的TMS320F2812芯片,该芯片是32 bit定点处理器,主频高达150 MHz,具有14路PWM、可编程死区、2路SCI、16路12 bit ADC、6路脉冲捕获、片上128 K×16 bit Flash存储器。该芯片丰富的外设接口简化了伺服架构,强大的数据处理能力可以轻松实现复杂的伺服控制算法。
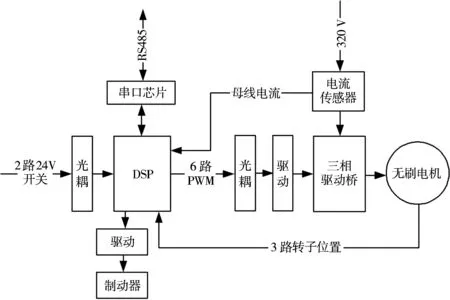
图3 无刷直流电机驱动器的原理框图
此外,为了实现功率驱动电路的小型化设计,无刷电机驱动器的驱动芯片采用IR公司出品的μIPM系列三相全桥集成驱动芯片IRSM836-045MA。该芯片的母线电压为500 V,驱动电流为4 A,最大峰值电流为35 A,而封装尺寸仅为12 mm×12 mm。该芯片的外形图如图4所示,控制电路图如图5所示。
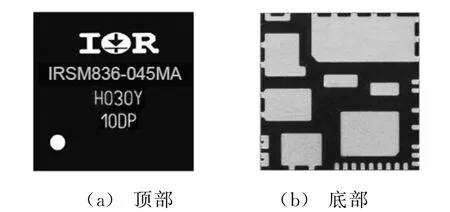
图4 IRSM836-045MA外形图
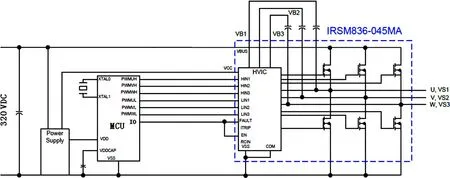
图5 控制电路框图
通过控制电路可以看出,利用IRSM836-045MA搭建的无刷直流电机驱动电路外围电路及其简单,控制信号直接和TTL或CMOS电平兼容。为了简化上管驱动电路的设计,上管驱动电源采用自举电容供电,自举电容的容量计算参见文献[5]。
为了尽可能减小功率驱动电路的热耗,无刷直流电机驱动采用HPWM-LON控制方式[6]。同时,驱动芯片顶部涂导热硅脂通过散热铝片与无刷直流电机壳体连接。以上两项措施保证了无刷直流电机驱动器在雷达架设工作的几分钟内不会因温度过高而损害。
4 主控制器设计
如图1所示,主控制器用于接收键盘的指令,采集水平传感器、俯仰编码器和方位编码器的数据,控制撑腿电机和背架撑杆电机运转,并且把架设系统的状态反馈给显示屏进行显示。此外,主控制电路还给转台方位驱动器发送控制指令、接收转台方位驱动器反馈的故障状态。
主控制器与水平传感器的接口为RS485串口,与俯仰编码器的接口、方位编码器的接口为SSI串口,与撑腿电机和背架撑杆电机的接口为RS485串口,与显示屏的接口为地址和数据总线,与转台方位驱动器的接口为CAN总线,与键盘的接口为外部8路IO口(4×4矩阵键盘)。此外,为了主控制器的通用型,还预留8路24 V开关量输入接口。统计得出,主控制器总共需要2路RS485串口、2路SSI接口、1路CAN、8路24 V开关量输入接口、8路IO键盘接口及地址数据总线接口。
由于主控制器接口复杂,主控芯片也采用无刷直流电机驱动器选用的TMS320F2812芯片。这是因为该芯片集成了丰富的外设:1路CAN、1路SPI、2路SCI、56路通用IO。同时,和无刷直流电机驱动器选用相同DSP便于系统开发,降低采购成本。
由于水平传感器的波特率、帧定义都与撑腿和背架撑杆电机的波特率、帧定义不同,在硬件设计上,水平传感器通过RS485串口芯片与TMS320F2812的SCIA连接,撑腿和背架撑杆电机以总线的形式通过RS485串口芯片与TMS320F2812的SCIB连接。水平传感器采用主动发送数据的通信方式,撑腿和背架撑杆电机采用询问应答的通信方式。
系统中方位编码器和俯仰编码器为两个SSI接口的绝对值编码器,通过接口电平转换电路与TMS320F2812的SPI接口连接[7]。但是TMS320F2812仅有1路SPI接口,不能同时读取两个编码器值。为了解决这个矛盾,考虑到地面情报雷达运行状态下雷达俯仰角并不经常调整,而需要调整俯仰角时,方位角又可以不用运转。因此可以采用分时控制的方式采集俯仰角和方位角。具体地,TMS320F2812的SPI接口通过模拟继电器和电平转换电路分别接入俯仰编码器或水平编码器。当需要调整雷达俯仰角时,TMS320F2812发出切换指令,控制模拟继电器把俯仰编码器接入TMS320F2812的SPI接口;当雷达正常运行时,TMS320F2812发出切换指令,控制模拟继电器把方位编码器接入TMS320F2812的SPI接口。
对于键盘、显示屏和转台方位驱动器的接口均为一一对应关系,这里就不再对接口设计进行详述。
5 结束语
本文介绍了一种车载雷达自动架设系统,给出了自动架设系统架构,提出了控制驱动一体化电机的设计方式,对主控制器给出了基于TMS320F2812芯片的高集成设计方式。实现了车载雷达自动架设系统高集成、小型化设计,大大简化了自动架设系统的结构设计及电缆布线,对以后的车载雷达紧凑型自动架设系统工程设计具有很好的借鉴意义。
[1]刘志学.高机动雷达的系统设计[J].雷达科学与技术,2004,2(2):65-68.
[2]汤辉,倪仁品.某米波警戒雷达的全自动架拆系统[J].兵工自动化,2008,27(6):17-19.
[3]朱奎林.直流电机电刷的选择方法与主要影响因素[J].自动化与仪器仪表,2014(6):151-152.
[4]夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25-34.
[5]WOOD P,BATTELLO M,KESKAR N,et al.IPM Application Overview-Integrated Power Module for Appliance Motor Drives[EB/OL].[2002--11-08].http:∥www.irf.com/technical-info/appnotes/an-1044.pdf.
[6]白利飞,马瑞卿,张庆超.无刷直流电动机PWM斩波方式分析[J].微特电机,2013,41(2):21-23,41.
[7]张琴琴,杨建宏,刘琳.基于DSP的绝对式光电编码器串行接口设计[J].现代电子技术,2012,35(14):185-188.
猜你喜欢
大电机技术(2022年5期)2022-11-17
军事文摘(2022年14期)2022-08-26
汽车实用技术(2022年12期)2022-07-05
北华大学学报(自然科学版)(2021年3期)2021-07-13
云南画报(2020年12期)2021-01-18
新世纪智能(数学备考)(2020年9期)2021-01-04
金桥(2020年10期)2020-11-26
电脑爱好者(2020年6期)2020-05-26
北京航空航天大学学报(2017年5期)2017-11-23
电子制作(2017年1期)2017-05-17
