基于电磁感应的割草机器人边界技术研究*
2015-01-21 06:46:00杨金龙邬杨波
机电工程 2015年11期
杨金龙,赵 旭,邬杨波,蓝 艇
(宁波大学信息科学与工程学院,浙江宁波315211)
0 引言
随着人们对生活品质的日益关注,小型移动机器人在家庭服务领域的应用越来越广,面向家庭的割草机器人也得到较多的应用,因此受到国内外研究人员的普遍关注。
常用的割草机器人,在设计时一般选用基于行为的移动机器人架构[1]。在这种架构下,就割草机器人而言,完成规定区域内的修剪工作,需要使割草机器人具有识别边界的能力。
目前,学术界已提出多种边界技术,例如用激光制导的方式可实现道路边界识别[2-3],但由于装置体积与价格上的原因,该方法不太适合应用于小型移动机器人。通过使用图像处理的方式提取边界信息,可以实现特定场合的边界识别[4],但不适用于特征信息提取困难的场合[5]。RFID 的方式只适用于室内移动机器人,而不适用于室外的割草机器人[6],因此上述方式都不适用于割草机器人。
现有的边界识别技术主要可分为有信标和无信标两种。无信标是指:不在区域边界上放置标志物,而是通过引导等方式生成数字地图,再与当前环境进行匹配,从而实现识别功能[7]。这类方式可以节省边界材料,但对于大型场地的引导以及每次需从固定点出发,都存在一定的不便。有信标是指:在边界上放置标识物来实现边界识别,例如借助光学标识物,永磁体,通电电缆等信标,对于小型家用移动机器人而言,这类方式更具优势。其中商业化最好的是通过检测通电电缆来识别边界的方式,但该方式需要信号发生装置以及闭合回路,一旦回路断了就不能正常工作,此外也不方便构建复连通区域。
电磁感应技术(即涡流检测原理)在军事、勘探、安防等其他领域已有比较成熟的应用。鉴于其灵敏度高、环境适应性好,以及非接触测量[8],可以应用于割草机的边界检测中。
本研究提出一种基于电磁感应的割草机器人边界技术,采用金属导体围绕工作区域作为边界,通过电磁感应原理,获取边界与检测端的远近关系,从而来识别边界。该方案具有成本低廉、易维护和易构建复连通区域的特点。
1 硬件平台介绍
割草机器人的基本硬件平台主要由主控MCU,边界检测传感器LDC1000,姿态检测单元MPU6050 及HMC5883L,电机及转速检测单元组成,整体结构如图1所示。
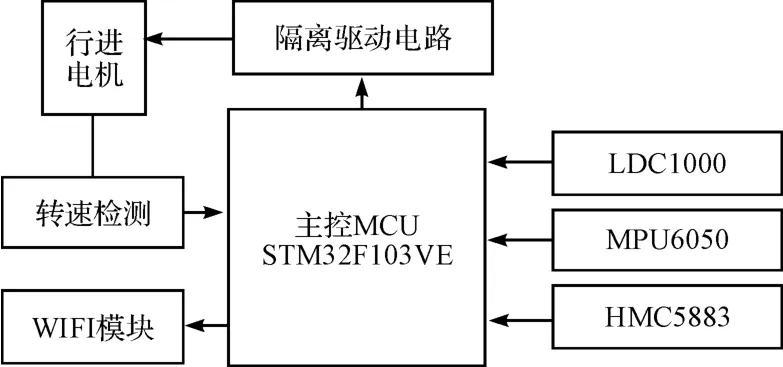
图1 割草机器人的硬件结构
主控单元选用ST 公司的STM32F103 微处理器,主控单元搭载了μC/OS 操作系统,对外部接收来的数据做处理分析,选择相应的行为来完成任务。
电机及相关部件中,转速检测使用的是欧姆龙旋转编码器。通过转速的测量,可以实现速度和方向的控制。由于存在地面崎岖、轮子打滑等因素,本研究利用姿态检测单元来辅助控制行进的方向,提高系统航向控制上的鲁棒性,该单元由六轴传感器MPU6050 和电子罗盘HMC5883L 组成。本研究使用HMC5883L 来标定迂回遍历时的方向,使用MPU6050 融合输出的航向角,来辅助标定遍历方向,及辅助编码器进行航向控制。
边界检测单元用于工作区域的边界检测上,选用电感数字转换器LDC1000,外加自制线圈可以实现非接触式电感检测,将检测到的阻抗参数通过SPI 发送到主控,进行处理分析后可实现边界识别。
割草机原型如图2所示。

图2 割草机原型
2 边界识别的原理
由麦克斯韦电磁场理论可知变化的磁场会在周围空间产生电场,这个电场会促使导体中的自由电子定向移动,从而产生感应电流。当导体置于通有交变电流的线圈中,会使导体表面产生涡流效应,电涡流产生新的磁场会削弱线圈的磁场,导致线圈的等效电阻发生变化。
利用电磁感应原理,实现金属边界的检测其基本原理为:当金属物接近通电线圈所在的平面时,会导致金属表面产生涡流,以及线圈介质条件发生变化。通过检测线圈的介质条件,即可以检测出金属边界。
将金属物靠近一个半径为R,通有I =ImcosωT 的电流的单匝线圈时[9],根据毕奥-萨伐尔定律,中心轴线d 方向上的磁场强度大小为:

式中:μ0—真空磁导率;μr—介质磁导率,μr的大小受金属与磁场的相对运动影响。
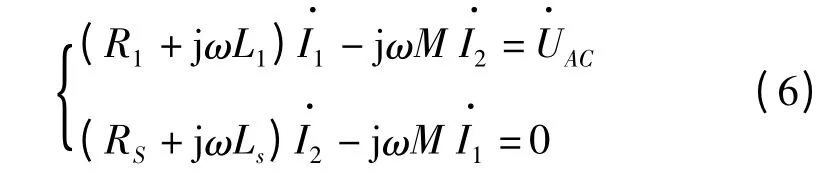
因此涡流大小与导体的磁导率μ,电阻率ρ,通电线圈的频率f,线圈与导体间的距离d 等等因素有关,由于涡流产生的新磁场会影响线圈的磁场,从而影响到线圈阻抗的大小,阻抗变化大小同样与μ,ρ,f,d 等因素有关。假定金属导体是均质的,其性能是线性和各向同性的,线圈的阻抗Z 可用如下函数表示[10]:

在同一线圈,同一振荡电路等条件下,可以保证μ,ρ,f 等参数为常量,此时阻抗表达式可以简化成:

基于该原理,本研究通过分析初级线圈的阻抗参数来判断阻抗与距离的关系。
3 基于电磁感应的边界识别
3.1 边界识别原理的应用
基于电磁感应原理的边界识别,限定了边界材料应为导体。在实际使用的时候,出于电导率、简便性、耐用性等方面的考虑,一般选用金属材料,围绕工作区域一周用作可识别的边界。而对于复连通区域的构建,利用同样的方式,在工作区域内利用金属丝围绕禁止进入的区域一周,即能防止割草机器人进入。
边界建立后,本研究利用电感数字转换器LDC1000 来检测金属边界,根据检测到的阻抗值来识别边界。电感数字转换器LDC1000 在线圈上产生交变的电流,从而产生交变的电磁场,当线圈遇到边界时,会在边界表面形成涡流,从而产生新磁场,并与线圈上的磁场相耦合,改变线圈一侧的阻抗参数。等效阻抗大小与边界的相对距离有关,可以通过该阻抗值的大小估算割草机器人与边界间的距离。
本研究根据上述工作原理建立移动机器人与金属导线边界的分析模型如图3所示。图3 中,左侧竖直直线表示边界线,同心圆L 表示的是外接线圈,右侧为LDC1000,传感器的移动方向为从右到左,逐渐靠近边界线。根据图3(a)的分析模型,电路工作时金属导线边界可以等效为电感;由此可以得到对应的等效电路如图3(b)所示。当传感器从右向左移动时,将在边界表面形成感应电流I2。
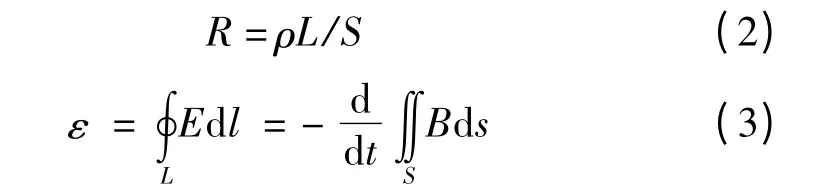
根据图3 中的等效电路得到KVL 方程为:
由方程(6)可以得到初级线圈的等效阻抗为:

由于Z=F(d),而R(d)与L(d)是从初级线圈侧看进去的金属边界的等效电阻和感抗,并且R(d)与L(d)都是关于距离d 的函数,线圈侧的等效阻抗可表示为:

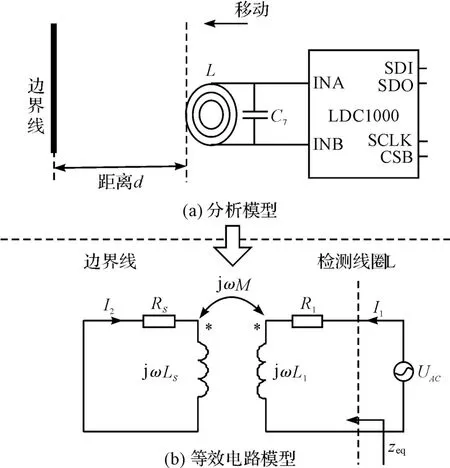
图3 分析模型及等效电路模型
谐振电路的导纳可表示为:
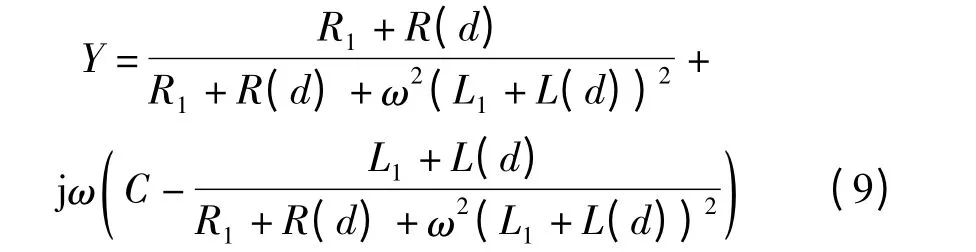
谐振时有:

令:

将式(10)代入则可得化简后的并联等效电阻:

由于R(d)与L(d)是关于距离的函数,可以通过检测等效并联电阻Rp,来感知边界的远近关系,从而让移动机器人进行沿边界行走或者执行不越过边界的行为。
3.2 边界检测实验与结果分析
根据国外家庭庭院草坪的面积大小,本研究在户外草坪内,用线径为2 mm 的铁丝围出一个8 m ×8 m的矩形区域,作为割草机的测试环境,为保证区域内全覆盖遍历实验的进行,笔者进行了边界测试实验,实验的环境示意图如图4所示。
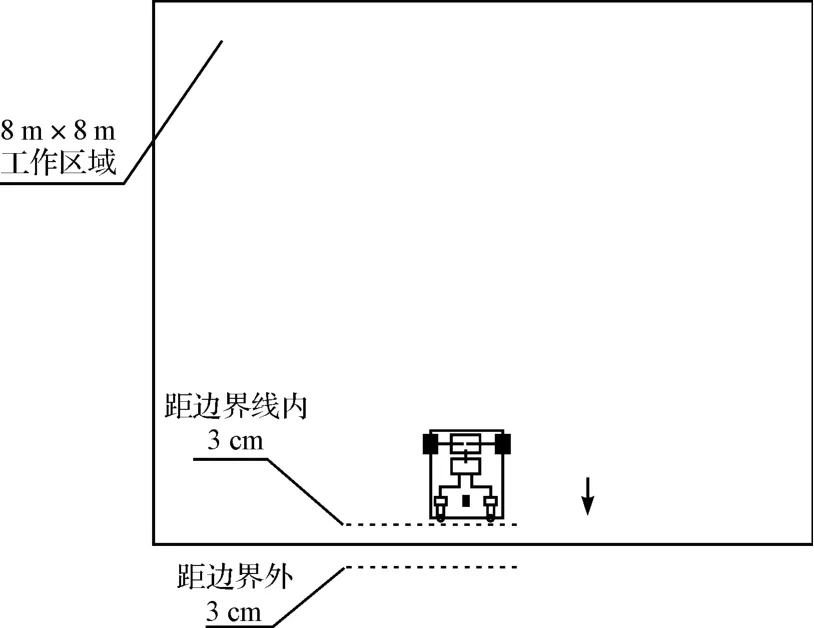
图4 边界检测实验环境示意图
在实验中,传感器与边界之间的距离用PCB 线圈外侧与边界中心之间的距离d 表示,如图3 中的分析模型所示。
本研究将传感线圈固定在一个高度,使得检测线圈逐渐靠近边界,每隔10 ms 进行一次数据采集,经过中值滤波后,将数据传至上位机。通过测量边界内3 cm处到边界外3 cm 处的LDC1000 输出,来完成一组样本的采集。再经不同高度,同样方式完成所有样本点的采集。最后将传至上位机的所有样本点,在上位机中进行数据拟合。
LDC1000 输出是与等效并联电阻量化后的相关数字量,该数字量的大小反映了传感器和边界之间的距离。LDC1000 的输出与PCB 线圈距金属边界水平距离d 以及PCB 线圈的高度之间的关系曲线如图5所示。
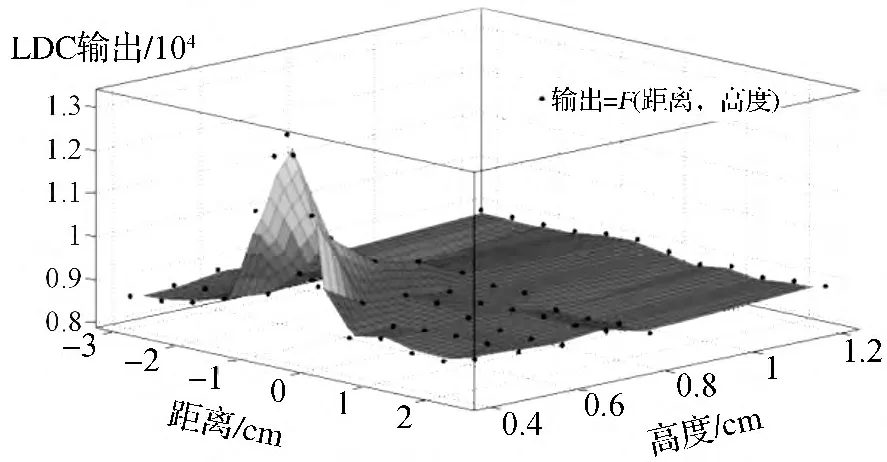
图5 LDC1000 输出与边界水平距离、垂直高度间的关系
实验中使用外径为1.25 cm,内径为0.25 cm 的PCB 传感线圈以及线径为0.2 cm 的金属铁丝,由实验结果可以观察到,当高度大于0.8 cm 时,输出不变,即使用该线圈的最大有效高度为0.8 cm。当高度处于有效范围内,水平移动,使得测量距离改变,在距离为(-1.5,1.5)的范围内输出具有明显的变化。当线圈中心处于边界上方时,涡流损耗最大,损耗电阻最小,由于LDC1000 的输出值与换算后的Rp为倒数关系,LDC1000 输出值输出处于峰值状态。
从测试结果上分析,在有效范围内,当线圈接近金属边界时,LDC 输出值会发生明显的变化。基于这种变化能反映检测线圈与边界线间的距离关系,本研究利用这个特性,在低速运行的割草机器人中可以有效地确定巡航边界。
4 边界识别算法流程
为实现有效地边界识别,本研究进行了边界识别算法的设计。传感器数据的采样周期为10 ms。为了免去随机干扰的影响,对传感器采集到的数据进行了相应的处理。首先是采集数据的预处理,剔除受到干扰的偏离于正常测量值的数据;然后将数据进行中值滤波以获得有效的检测数据。
实验中使用外径为1.25 cm,内径为0.25 cm 的PCB 线圈以及线径为0.2 cm 的金属铁丝,使割草机器人从边界外,慢速向边界内行驶,不断比较读入的数据,记录最大值作为阈值,即在离边界最近时的读数设为阈值。该阈值设定的算法流程如图6(a)所示。阈值设定后进入识别流程,通过数据的残差值来达到边界识别的目的,当读数落入阈值附近时,认为遇到边界线,经多次读数与判别保证准确性,返回边界状态信息及结束识别流程。边界识别算法流程如图6(b)所示。该算法经实际验证,能够有效识别边界,实现边界检测。
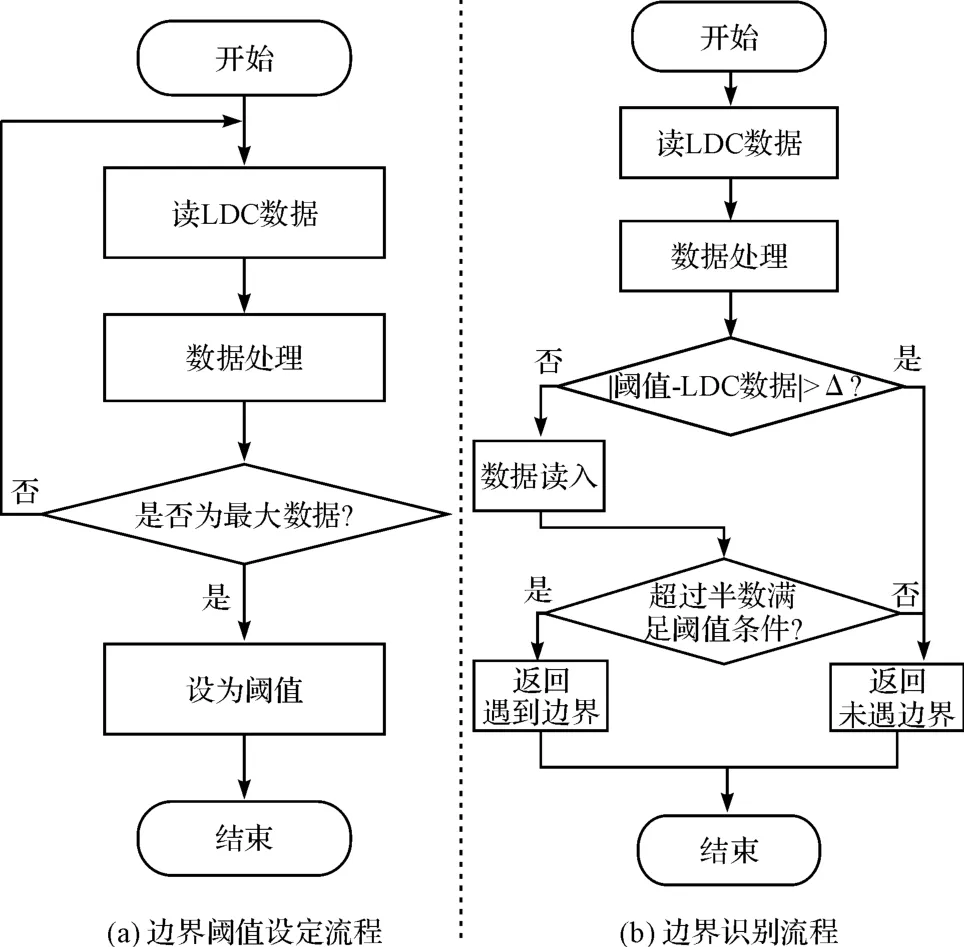
图6 边界阈值设定流程及边界识别算法流程
5 结束语
对于边界建立与识别,目前有人工引导的方法、地图匹配的方法、检测通电缆线的方法,其中商业应用最广的方法是检测通电缆线的方法。本研究提出了一种基于电磁感应原理的边界识别技术,该方法以无源的金属导线为边界,通过电磁谐振方式检测涡流损耗等效电阻的变化,探测边界的有无。本研究在详细分析检测基本原理的基础上,经过实际测试验证了该方法的可行性;同时本研究设计了基于该方法的识别算法流程,最后经割草机器人的实际测试表明,该方法可以实现边界检测的目的。
该方法还可以应用于其他类型的移动机器人的边界识别中。
[1]BROOKS R A.A robust layered control system for a mobile robot[J].IEEE Journal of Robotics and Automation,1986,2(1):14-23.
[2]HU Z,WANG H,ZHANG L,et al.Laser sensor based road boundary recognition of mobile robot[C]//Networking,Sensing and Control,2009.ICNSC'09.International Conference on.Okayama:IEEE,2009:210-215.
[3]YALCIN O,SAYAR A,ARAR O F,et al.Detection of road boundaries and obstacles using LIDAR[C]//Computer Science and Electronic Engineering Conference(CEEC),2014 6th.Colchester:IEEE,2014:6-10.
[4]CHANG C K,SIAGIAN C,ITTI L.Mobile robot monocular vision navigation based on road region and boundary estimation[C]//Intelligent Robots and Systems(IROS),2012 IEEE/RSJ International Conference on.Vilamoura:IEEE,2012:1043-1050.
[5]NITULESCU M.Mobile Robot Tracking Control Experiments along Memorized Planed Trajectories[C]//Automation,Quality and Testing,Robotics,2006 IEEE International Conference on.Cluj-Napoca:IEEE,2006:296-301.
[6]TAKAHASHI Y,II Y,JIAN M,et al.Mobile robot self localization based on multi-antenna-RFID reader and IC tag textile[C]//Advanced Robotics and its Social Impacts(ARSO),2013 IEEE Workshop on.Tokyo:IEEE,2013:106-112.
[7]祖 莉,王华坤,岳 峰.全区域覆盖移动机器人无标识工作环境的边界建立与识别[J].机器人,2005,27(2):97-101.
[8]曹青松,周继惠.基于电涡流的金属种类识别技术的理论与实验研究[J].仪器仪表学报,2007,28(9):1718-1722.
[9]刘慧娟.一种新型智能金属探测器[J].北方交通大学学报,2001,25(1):95-99.
[10]于亚婷,杜平安,李代生.电涡流传感器线圈阻抗计算方法[J].机械工程学报,2007,43(2):210-214.
猜你喜欢
大电机技术(2022年4期)2022-08-30 01:38:30
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
中国特种设备安全(2021年5期)2021-11-06 05:09:26
装备制造技术(2020年11期)2021-01-26 00:39:12
模具制造(2019年7期)2019-09-25 07:29:58
通信电源技术(2018年5期)2018-08-23 01:16:00
制造技术与机床(2017年3期)2017-06-23 08:11:21
汽车维护与修理(2015年6期)2015-02-28 12:17:05
汽车科技(2014年6期)2014-03-11 17:46:08
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:09