
MEMS惯性技术的发展及应用
2015-01-17 05:46齐广峰吕军锋
电子设计工程 2015年1期
齐广峰,吕军锋
(1.海军装备部 陕西 西安 710043;2.北方光电股份有限公司 陕西 西安 710043)
微机电系统(Micro-electromechanical Systems,MEMS)惯性传感器及惯性系统已成为未来导航技术不可或缺的发展方向。MEMS技术以其体积小、重量轻、低功耗低、成本低以及抗冲击等优点得到了广泛应用。目前消费级MEMS惯性技术的发展已较为成熟,其与磁强计、速度计及以GPS为代表的全球导航卫星系统 (Global Navigation Satellite System,GNSS)等辅助系统构成组合系统,可为大多数导航应用提供适当的解决方案。
1 MEMS惯性传感器发展状况
将导航系统工作一小时的水平位置圆概率误差(Circular Error Probability,CEP)称为 CEP速率(单位为 nm/h)。美国在20世纪70年代,根据INS独立运行的CEP速率,分为高精度(战略级)系统(0.1 nm/h)、中精度(导航级)系统(1 nm/h)和低精度(战术级)系统(10 nm/h)[1]。 文献[2]进一步将惯性导航系统(INS)精度分为:战略级、导航级、战术级、消费级,对应的惯性传感器精度如表1所示。
随着硅半导体工艺的成熟和完善,自20世纪80年代起出现的MEMS惯性传感器技术,极大的促进了惯性技术在对成本、尺寸和功耗敏感的潜在应用领域中的发展。

表1 惯性传感器的精度级别Tab.1 Level of precision inertial sensors
MEMS加速度计按其测量原理可分为摆式加速度计和谐振式加速度计。目前摆式MEMS加速度计的测量精度可达25μg至1 mg,谐振式MEMS加速度计的测量精度接近1 μg,因此MEMS加速度计已能满足大部分导航的精度需求。
振动型敏感器是目前MEMS陀螺的研究重点,具体包括:调谐音叉型陀螺和谐振环型陀螺。前者工艺简单利于大批量低成本生产;后者具有更高的理论精度但结构及原理更为复杂。随着对器件内部几何结构、尺寸、电子学及封装技术与器件性能之间关系研究的深入,以及平面壁蚀刻技术等制造工艺的完善,MEMS陀螺精度近年来得到了快速提高。目前精度达10°/h的MEMS陀螺已投入商用,国际上MEMS陀螺的最高实验室精度已优于0.01°/h[3]。
低成本微小型固态传感器,是现代惯性器件技术发展的目标。0.01~10°/h的陀螺能够满足大多数导航应用的精度要求。目前光学陀螺已代替机械式陀螺成为在这一精度范围应用的主要敏感器。MEMS陀螺已拓展至中低精度的战术级应用领域,随着技术的进步,MEMS陀螺势必将取代大多数战术级应用中的光学陀螺。
2 MEMS惯性系统发展状况
MEMS惯性系统分为惯性测量单元(IMU)和惯性导航系统(INS)。采用MEMS-IMU与GPS构成SINS/GPS组合导航系统,是目前MEMS-INS应用的主要形式。这是由于:一方面目前MEMS-IMU的精度低,以其构成的SINS仅能维持数秒有价值的导航数据,组合导航技术是提高MEMS-INS性能最具性价比的技术途径;另一方面,MEMS-IMU极大的降低了组合系统中SINS的成本,使MEMS组合导航系统极具成本优势,促进了组合导航技术的发展和应用。
2.1 Draper实验室MEMS组合导航系统研究概况
美国国防部高等研究计划局(Defense Advanced Research Projects Agency,DARPA)自20世纪90年代起启动了一系列MEMS惯性技术的研究项目。受其资助,美国Draper实验室在该领域进行了大量研究工作,处于国际领先地位。
Draper实验室1994年首次推出由3只MEMS陀螺及3只MEMS加速度计构成的IMU,并于1995年起进行了一系列验证研究项目,以评估MEMSSINS/GPS组合导航技术在制导弹药等战术应用中的可行性。如图1所示[4],其研究项目具体包括:增程制导弹药,弹药能力先进技术验证,低成本制导电子单元INS/GPS。此外,其采用在DARAPA的MEMSIMU项目和通用制导惯性测量单元项目资助下研制的MEMS-IMU与一个加装选择可用性反诱骗模块(Selective Availability Anti Spoof Module,SAASM)的 GPS接收机,实现了 MEMS-INS/GPS深耦合。

图1 Draper实验室MEMSSINS/GPS组合导航系统研发历程Fig.1 Draper laboratory MEMSSINS/GPSintegrated navigation system R&D process
上述研究表明,采用消费级MEMS-IMU与GPS构成的紧组合及深组合系统能够满足战术级导航应用需求,成本低且具有一定的抗GPS干扰能力。
2.2 MEMS-IMU研制进展
1999年Honeywell公司从波音北美公司收购了Draper实验室MEMS惯性技术,在其基础上进行战术级MEMS-IMU研发。此外,BAE、BEI、ADI及一批惯性技术领域内的著名研究机构也纷纷致力于MEMS-IMU在精度、体积、成本等方面的优化。以零偏不稳定性 (Bias Instability,BI)及随机游走(Random Walk,RW)为主要指标,近年来 MEMS-IMU 的研制进展可总结如表 2所示[5-6]。
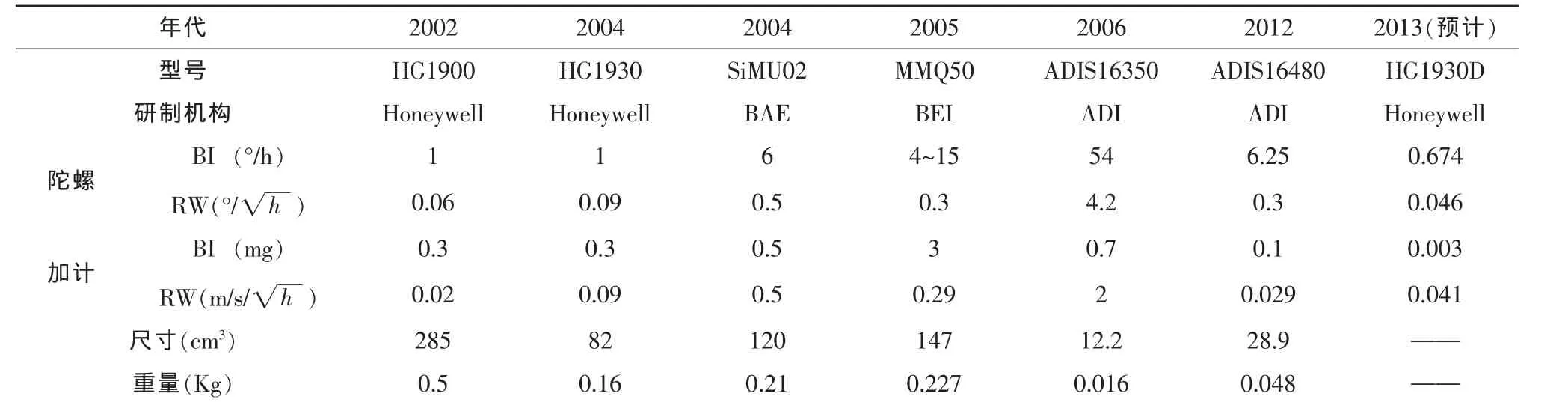
表2 近年来的MEMS-IMU研制进展Tab.2 MEMS-IMU recent research progress
由此可见,近年来MEMS-IMU的发展呈现出两个主要特点:战术级MEMS-IMU的性能进一步提高,且体积、重量及成本逐步降低;消费级MEMS-IMU的精度、量程及环境适应性(温度、加速度)等性能正逐步提高。
2.3 MEMS组合导航技术发展现状
近年来,利用低成本的消费级MEMS-IMU进行SINS/GPS组合导航技术研究受到了广泛的重视。国外MEMS SINS/GPS组合导航技术起步较早,已有成熟的产品。其中,战术级MEMS组合系统主要以提高GPS抗干扰能力为发展目标,目前已发展至与P(Y)码深组合阶段;不同形式的松组合及紧组合系统在军用及民用领域得到广泛研究和应用。低成本MEMS-IMU与GPS、磁强计等辅助导航系统构成的小型化、低成本多传感器组合导航系统成为当前的研究热点之一。Stanford大学采用3天线GPS接收机构成超短基线GPS姿态解算与低成本MEMS-IMU姿态解算进行融合[7]。飞行试验表明,当GPS正常工作时,组合系统利用MEMS-IMU的测姿精度与高精度IMU相近,优于0.2°;当GPS中断1~2分钟时,低成本MEMS-IMU独立运行的姿态精度可维持在2~6°以内。
随着磁传感器的小型化,地磁航向系统也被视为MEMS-IMU的一种重要的辅助系统。美国Crossbow公司最新的NAV440及GNAV540利用低成本MEMS-IMU及三轴磁强计构成姿态航向参考系统 (Attitude and Heading Reference System,AHRS),并与C/A码GPS接收机组合。系统采用松组合方式,以GPS位置、速度信息及地磁航向信息为外部观测量对MEMS-IMU的姿态解算误差和传感器误差进行校正。飞行测试表明该系统在GPS信号完全中断时可在1分钟内维持1 m的导航精度[8]。荷兰Xsens公司针对民用市场推出的MTi等多个系列AHRS,采用了ADI公司的低成本MEMS惯性传感器和磁强计。其2012年推出的AHRS/GPS组合导航系统 MTi-G-700,动态姿态精度优于 1°,位置精度达 1 m(1σSTD),体积 55 cm3,重量 55g。
国内MEMS SINS/GPS组合导航技术尚处于研制试验阶段,主要的研究力量集中在高校及研究所。清华大学采用美国BEI公司的微型谐振陀螺及IC Sensors公司的硅微加速度计研制MEMS-IMU,车载实验表明组合系统的定位误差(CEP<4m)优于 GPS的定位误差(CEP=15 m),且当GPS短时间失锁时,组合系统输出未发生突跳且在恒速行驶时仍能维持较高的定位精度(CEP=1.61 m)[9]。上海交通大学利用3DM-GX1的MEMS器件和NovAtel的OEMV-1G型接收机研制了松组合系统,车载实验表明,组合系统在卫星状况良好时的定位精度优于2 m;卫星失效30 s时MEMS-IMU独立工作的位置误差为 150~200 m;在卫星失效阶段引入车辆约束条件及磁罗盘辅助设备,组合系统在直线段定位精度为3 m,在拐弯段最大位置误差为30 m[10]。哈尔滨工程大学对MEMS AHRS/GPS紧组合融合滤波技术进行了研究[11]。
3 发展趋势
目前各种导航应用对MEMS惯性导航技术的发展起到了巨大的推动作用,其主要发展目标是继续降提高系统精度、降低附带伤害、增大有效范围并降低尺寸和成本,提高环境适应性。为实现上述目标,需要在高性能MEMS陀螺、芯片级MEMS-IMU、芯片级MEMS组合导航系统以及多传感器组合导航算法等方面展开深入研究。
未来高性能MEMS陀螺的研究内容主要包括:MEMS速率积分陀螺、导航级MEMS陀螺、微型冷原子传感器及光学MEMS陀螺等。目前国际上已开始采用特定用途集成电路(Application Specific Integrated Circuit, ASIC) 将 MEMS传感器和处理器进行封装,研制芯片级MEMS-IMU。美国DARPA的芯片级时间惯性测量单元(Timing and Inertial Measurement Unit, TIMU)研究 2010 年取得成功[4]。
此外,尽管MEMS-IMU的性能提升降低了导航系统对GPS等辅助系统的依赖,但辅助系统仍是确保导航任务成功的必要保障。例如战术级MEMS-IMU在纯惯导模式下3分钟内的位置误差可达到150 m左右不能满足实际需求。因此MEMS-IMU与GPS等辅助系统构成的多传感器组合导航系统,仍是未来一个重要的发展方向。
据统计仅2008年全球共计生产了7.52亿个MEMS加速度计和陀螺,应用于汽车工业及消费电子工业,其市场规模正以10%~20%的年增长率成长。MEMS传感器及IMU的市场份额由2009年的18亿美元增长到2013年的30亿美元[12]。由于战术级MEMS-IMU的发展,MEMS技术在国防领域的市场份额正逐步增长。
4 结束语
微电子技术的发展取代了传统的模拟、数字电路技术,改变了人类的日常生活。与之类似,MEMS技术作为微电子技术的延伸,未来将对导航技术的发展产生深远影响。MEMS惯性传感器和惯性系统在各个领域均具有重大意义,是关系到国家经济、安全和国际竞争力的战略技术。
本文着重介绍了MEMS惯性系统近年来的新进展。通过对比,可以发现国内外在该领域仍存在差距,这需要我国相关科研单位密切跟踪国际发展动态,从传感器结构、材料、封装、工艺以及系统设计、测试等多方面出发,制定周密的研发计划,促进我国MEMS惯性技术的发展。
[1]Grewal M S,Weill L R,Andrews A P.Global positioning systems, inertial navigation, and integration (2nd edition)[M].John Wiley&Sons, Inc,2007.
[2]Schwarz K P,El-Sheimy N.Digital mobile mapping systemsstate of the art and future trends[M].Taylor&Francis Group,2007.
[3]Osiander R,Darrin M G,Champion J L.MEMS and Microstructures in Aerospace Application[M].CRC Press,2006.
[4]Barbour N,Hopkins R,Kourepenis A.Inertial MEMS Systems and Applications[M].NATO Lecture series,RTOEN-SET-116,Low-Cost Navigation Sensors and Integration Technology,2011.
[5]Hanse J G.Honeywell MEMS inertial technology&product status[C]//Position Location and Navigation Symposium,2004.Monterey,USA,2004:43-48.
[6]Scaysbrook I W,Cooper SJ,Whitley E T.A miniature, gunhard MEMSIMU for guided projectiles,rockets and missiles[C]//Position Location and Navigation Symposium,PLANS 2004:26-34.
[7]Hayward R C,Gebre-Egzibher D,Schwall M,et al.Inertially aided GPSbased attitude heading reference system (AHRS)for general aviation aircraft[C]//Proceeding of the 1997 10th International Technical Meeting of the Satellite Division of the Institute of Navigation, Kansas, USA,1997:289-298.
[8]Rois J A,White E.Fusion filter algorithm enhancements for a MEMSGPS/IMU[C].ION NTM,San Diego,USA,2002.
[9]顾启泰,尚捷,毛刚,等.MIMS/GPS组合导航系统设计与实验[J].航空学报,2003,24(3):269-272.GU Qi-tai,SHANG Jie,MAO Gang,et a.MIMS/GPS integrated navigation system design and experimental[J].Acta Aeronautica et Astronautica Sinica,2003,24(3):269-272.
[10]叶萍.MEMS-IMU/GNSS超紧组合导航技术研究 [D].上海:上海交通大学,2011.
[11]夏琳琳.低成本AHRS/GPS紧耦合融合滤波技术研究[D].哈尔滨:哈尔滨工程大学,2008.
[12]El-Sheimy N.Emerging MEMS IMU and its impact on mapping applications[C]//Photogrammetric Week, Stuttgart,Germany,2009.
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
光学精密工程(2016年5期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
