
采用透视变换提高车辆识别准确率的方法研究
2015-01-17 05:46张星龙
电子设计工程 2015年1期
张星龙,冯 全
(甘肃农业大学 工学院,甘肃 兰州 730070)
随着经济技术的快速发展,工业水平的不断进步,道路上机动车的数量也在迅猛的增加。因此,为了保证交通运输的通畅,对交通资源合理分配的要求也在不断提高。根据对大量交通拥堵的数据统计分析得出,低效、原始的交通资源分配和管理模式是道路堵塞的主要原因,现有的道路资源并没有得到充分的利用。由于警力有限,通过人力提高管理效能是不现实的。而基于在城市中安装大量传感器建立的监测网络系统又会耗费很多不必要的经济投入[1-2]。所以有必要开发一种低成本、低人工、高智能的现代化监控系统,代替原始、老旧的工作模式,实现车流量的统计和运动目标的识别。
文中提出了一种在交通路口监控识别机动车与非机动车的方法,主要使用背景差分法提取运动目标[3],然后对图像进行透视变换,采用一个统一的阈值滤除行人、自行车和摩托车等非监控目标,只针对车辆进行检测。该设计的目的是提高车辆检测的准确性,为合理安排交通资源提供可靠、准确的统计数据,减少交通拥堵。
1 运动目标提取
本文采用背景差分法检测交通视频中的运动目标,该方法通过比较当前帧与背景图像的差异实现对目标运动区域的检测。假设B为背景帧,It是第t帧的视频序列,则背景差分的计算公式为:

其中(i,j)为每个像素点的位置,|·|表示绝对值运算,通过计算进入检测区域图像与背景的差异可以检测到运动目标的位置、大小等信息。得到的差异值需要通过阈值判断实现二值化操作,最终确定目标的位置,二值化的计算公式为:

其中τ是阈值,即当当前帧图像与背景图像的差异大于该值时才被识别为运动目标。
为了克服物体移动产生的阴影、光照变化和其他运动对象的影响、天气因素的干扰,采用了高斯混合模型[4](Gaussian Mixture Models,GMM)。该方法使用若干个高斯模型来表征图像中各个像素点的特征,用当前图像中的每个像素点与混合高斯模型匹配,如果成功则判定该点为背景点,否则为前景点[5]。
高斯混合模型是一种像素在时间域上的概率分布。定义t时刻X像素点的像素值Xt属于背景像素的概率为:

在视频监控中认为像素点是有前景、背景和阴影组成,故K一般选择为3,协方差矩阵Σj,t可 以表 示 为·I。 其中,σj,t表示第j个高斯分布的标准差,I为单位矩阵。
图像中每个像素点的概率分布都是由一组混合高斯函数描述的。当读入一个新的像素值,Xt+1,Xt+1的概率一般用混合高斯模型中占主要成分的几个分布函数来描述,并且用像素值Xt+1更新模型,从而实现背景图像的不断更新。
这种方法能够很好的解决由光照突变、背景中运动物体以及场景长时间缓慢变化甚至不变以及其他外界环境所产生的影响。
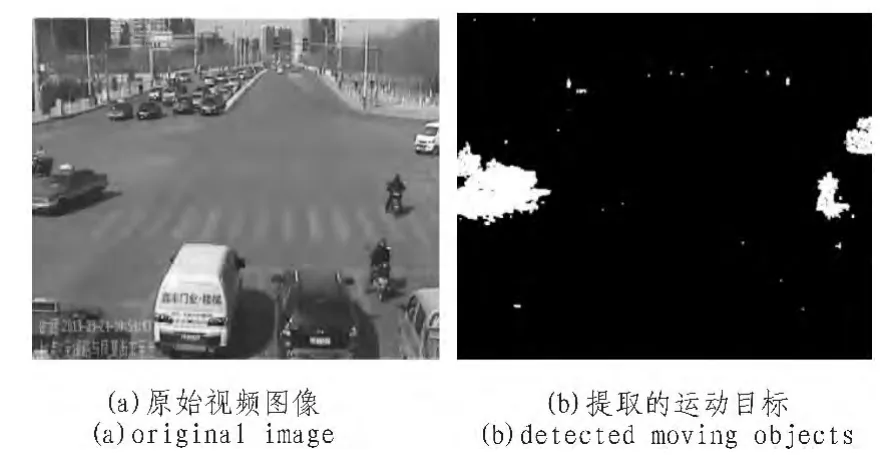
图1 建立高斯混合模型进行运动目标提取Fig.1 Detected moving objects using Gaussian mixture model
可以从图1中看出高斯混合模型对运动与非运动目标的提取效果。图中上下方向为红灯禁行状态,左右方向为绿灯通行状态。经过处理后,左右方向上通行的四辆机动车均被识别并效果明显,而上下方向上停止中的机动与非机动车辆均被很好的屏蔽,但由于高斯混合模型对运动目标敏感的特性,下方运动的摩托车也被识别为机动车辆,对检测形成干扰。
2 透视变换与非监测目标的剔除方法
智能交通系统监控视频中包含了多种不同类型的运动目标,例如车辆(监控目标)以及行人、摩托车和自行车等(非监控目标)。在检测机动车辆时,视频中出现的非监控目标会产生较强的干扰。因此需要在提取车辆的同时排除以上目标的干扰,提高车辆识别的准确率。
运动目标的识别过程中,面积和颜色都是重要的参考依据[6],其中机动车的面积比较大,其次是非机动车,行人的面积最小。并且由于行人头发颜色的原因,车辆上不会出现与人头部面积相当的黑色区域,若是黑色汽车,则整个车身都为黑色且面积较大;若不是黑色汽车则不会出现黑色区域,所以颜色特征又能在面积特征的基础上,进一步的确认目标的类别。
但由于摄像机的成像特性与光学原理所产生的透视效果,会导致在图像中不同位置的目标产生透视畸变,最明显的结果就是远处物体明显缩小。从而影响了基于面积和像素数量的目标识别过程,导致摄像头远端方向上的有效目标可能被误判或消除,对整体识别的效果产生很大的干扰:目标识别不准确、目标计数不准确等。为了消除这方面的影响,就需要对产生畸变的图像进行矫正。
真实坐标在摄像机像平面中成像的过程可以用数学公式表示为 A=HB,其中 A(X,Y)是真实世界坐标向量,B(x,y)是像平面坐标向量,H是变换矩阵[8]。实际情况中根据摄像头与地面相对静止的特点,通过手动标定,确定图1(a)中上下方向道路与左右方向道路的白色实线和路沿延长线的4个交点为矫正参考点,将该区域变换为已知的矩形。变换过程可以具体描述为:
其中 a、b、c、d、e、f、g、h 为变换矩阵的参数。 可以看出:

展开并消除得到:

所有变换前后的一对坐标点都能够满足上式。通过畸变前后标定的四对相对应的控制点坐标,将坐标代入式(3)则可得出四对方程组,由8个方程解出变换矩阵的8个参数a,b,c,d,e,f,g,h。
式(3)用矩阵表示为:

根据已知变换矩阵参数,将需要变换图像的每个像素坐标代入式(4),通过最小二乘法就能获得变换后的坐标。
视频图像中,透视变换对于较远的物体会产生较大畸变,解决交通路口的实际问题中,需要结合实际问题,选择畸变较小的区域;此外选择特定区域也在一定程度上减少了需要处理的目标数量。本文的监控区域围十字路口,选择的监控区域围图像从下往上约2/3的图像区域 (即图2(a)虚线以下区域),在该范围内的目标由于透视效应,非监测而目标(如图2(a)白色箭头所指位置)的尺寸相差较大。而变换后的图像模矫正了透视畸变,使非监测目标之间的尺寸较为接近,而与机动车的尺寸则相差较大(见图2(b))。这样,可以据每个运动目标区域面积和长宽比,剔除非监测目标。

图2 透视变换Fig.2 Perspective transformation
在检测车辆的同时,对检测到的行人和非机动车进行反向剔除处理,具体方法为:若运动对象面积小于阈值T1且高宽比大于阈值T2,则认为是非监测目标,将这一部分运动区域与之前高斯混合模型提取的运动前景图像做二次差分运算,消除掉非机动车的干扰,最终达到提高机动车检测准确率的目的。例如,图3(a)中,在监视区域,运动目标有3个,分别是图像中部的出租车以及一辆自行车和一辆摩托车(后者在图中的白色箭头处),后者距摄像头的距离相差较大,故在图像中尺寸相差也较大。图3(b)给出了这3个对象经过运动目标检测和透视变换后的情况,可以看出中的两个干扰目标尺寸相近。图3(c)给出用相同的阈值将它们剔除后的图像。
3 实验结果
根据本文提出的方法,通过在银川市宝湖路与凤凰街路口采集到的一段时长90秒、每秒20帧的视频,在Matlab2013b的环境中进行了测试。测试结果如表1所示。
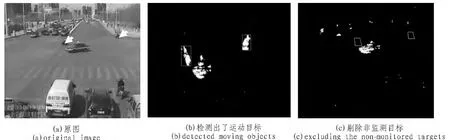
图3 不同位置的处理效果比较Fig.3 Comparison of the effects in different locations
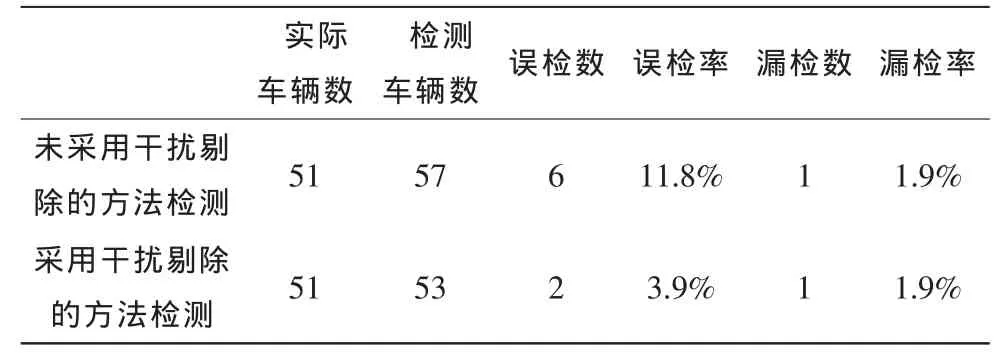
表1 程序检测运行结果Tab.1 Test result of prgram
4 结论
实验结果表明,该方法对提高识别车辆是有效的,与传统的直接车辆检测方法相比,本方法优化了运行的结果,排除了可能存在的干扰,有效的降低了误检率。采用了改进算法后仍然存在少量误检与漏检,其中误检来源与非机动车目标在图像中较为接近,受视频质量的限制无法区分;漏检来源与目标运动速度极其缓慢,是由高斯混合模型的特性对此并不敏感导致的。在试验中,由于图像质量和处理方法的不同,会对目标的识别、实验的结果产生很大影响。因此,不断的优化算法,
提高图像处理的精度和速度也是今后需要改进的方向。
[1]ZHANG W,Tan G,Ding N,et al.Vehicle classification algorithm basedonbinaryproximitymagneticsensorsand neural network[C]//11th International IEEE Conference on Intelligent Transportation Systems,2008:145-150.
[2]Munoz-Ferreras Ma J,Perez-Martinez F,Calvo-Gallego J,et al.Traffic surveillance system based on a high-resolution radar[C]//IEEEtransactionson geoscienceand remote sensing,2008:1624-1633.
[3]陈凤东,洪炳镕.基于动态阈值背景差分算法的目标检测方法[J].哈尔滨工业大学学报,2005,37(7):883-885.CHEN Feng-dong,HONG Bing-rong.Object detecting method based on background image difference using dynamic threshold[J].Journal of Harbin Institute of Technology,2005,37(7):883-885.
[4]Haque M,Murshed M,Paul M.A hybrid object detection technique from dynamic background using gaussian mixture models[C]//10th Multimedia Signal Processing,2008:915-920.
[5]张伟.基于DM6446的视频运动车辆及交通流量监测系统研究[D].杭州:杭州电子科技大学,2010.
[6]王琪.关于运动目标特征提取车辆颜色识别算法的研究[D].成都:电子科技大学,2011.
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
现代电子技术(2021年1期)2021-01-17
小天使·二年级语数英综合(2019年4期)2019-10-06
红领巾·萌芽(2019年8期)2019-08-27
小学生学习指导(低年级)(2019年6期)2019-07-22
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
中国与非洲(法文版)(2017年10期)2017-11-23
自动化学报(2017年11期)2017-04-04
CHIP新电脑(2016年3期)2016-03-10
