容错逆变器的三相四开关矢量控制策略
2015-01-15 05:52施火泉刘会超
服装学报 2015年5期
徐 鹏, 施火泉 , 刘会超
(江南大学 物联网工程学院,江苏 无锡214122)
变频器驱动系统是当前主流的驱动设备,采用功率变换器可以避免许多电机运行故障,如浪涌电流的吸收可避免过流应力损坏绝缘[1]。但是由于电力电子器件的脆弱性,驱动系统中逆变器故障最为频繁,导致整个驱动系统无法运行[2]。容错控制的目标是重构拓扑并结合相应控制策略以维护系统的稳定性和尽可能恢复系统故障前的性能[3]。
当变频器开关管发生短路故障时,通过植入桥臂的熔丝F1~F6,将故障相桥臂切断。利用开路诊断方法加以处理,便于故障后拓扑重构和容错控制策略的实施。不同位置的故障下,系统相电流表现出不同的故障特征。电压源型逆变器直流侧普遍采用两个相同的电解电容串联分压工作实现高压大电容平波。根据不同的故障特征,采用冗余的电力电子开关TRa,TRb,TRc将三相电机的故障相直接接入固有串联电容的中点就构成了四开关的三相逆变器电路。容错工作只增加一组低成本的双向晶闸管和熔丝,控制了装置的体积和成本,提高了三相四开关容错控制策略的研究价值。文中介绍了三相四开关逆变器运行原理及其SVPWM 控制,分析直流母线电容电压不平衡对电机运行的影响并作出修正。
1 系统结构分析
三相四开关空间矢量脉宽调制(SVPWM)控制的永磁同步电机控制系统如图1 所示。采用增量式光电编码器测量转速,并计算得到转角位置,通过PI 控制器实现转速环的调节。采用霍尔电流传感器测得的电机三相电流,先进行Clark 变换,再进行Park 变换得到id和iq,将iq与转速调节器的输出进行比较,id与0 进行比较,进而通过PI 控制器实现对电流环的调节。电流环的输出为给定电压U*d和,并结合测得的转角位置对和做Park 逆变换,得到和,然后进行三相四开关SVPWM调制,输出PWM 驱动脉冲,通过逆变器驱动电机运行。合理选取PI 调节器的参数,使驱动系统具有良好的性能。由于在四开关逆变器中只有4 个长度不等的开关矢量,且没有零矢量,其控制方法有别于六开关逆变器[4-6]。相对于直接转矩控制,矢量控制选择电流为控制变量,具有更好的电流跟踪性能,对于母线电容电压不平衡所产生的不平衡电流能够进行快速地跟踪和调节,自动对不平衡电压进行补偿,使电机电流趋于三相对称,从而减小电机的电流脉动和转矩脉动[7]。

图1 PMSM 三相四开关调速系统Fig.1 PMSM three-phase four-switch speed adjusting system
2 三相四开关矢量控制
2.1 三相四开关逆变器容错拓扑
以A 相故障为例,如图2 所示。新的拓扑由母线串联电容中点接通A 相绕组,由B 相和C 相分别控制VT2,VT5,VT3,VT6的通断。用“1”代表同一桥臂中功率器件上、下管导通,用“0”代表关断。当不考虑母线电容中点电压波动时,每个电容电压为Udc/2,相电压为UAN= Udc/3,UBN= UCN= -Udc/6。同理可求得SBSC= 01,SBSC= 10,SBSC= 11 时各绕组的相电压,将这4 组电压作为矢量控制的空间基本电压矢量,利用基本电压进行矢量组合来逼近基准圆进而对电机进行控制。
由上述计算,得式(1)中各相基本电压大小与开关状态SB,SC的关系。

4 组开关状态形成的空间基本电压矢量,在Clack 坐标变换下,可以简化为两相坐标系下的Uα,Uβ:


图2 逆变器容错拓扑Fig.2 Fault-tolerant inverter topology
空间基本电压矢量Us及其αβ 坐标系下的分量与开关模式的关系如表1 所示。基本电压矢量将矢量空间划为4 个扇区,幅值并不完全相等:U0=。图3 中空间基本电压矢量呈非对称分布,矢量顶点连线组成一个菱形,使得其控制电机磁链自由度降低,控制难度加大。

表1 开关状态向量Tab.1 Switch states vectors

图3 基本矢量Fig.3 Basic vector graphics
定义合成空间矢量Uout电压为

在三相四开关拓扑中,三相负载电流可以表示为

其中:UAN,UBN,UCN为三相负载的相电压;UBO,UCO为电机端点对串联电容中点电压;UON为中性点电压;ea,eb,ec分别为A,B,C 三相的反电动势;eba,eca为线反电动势;w 为用电角度表示的同步转速;E 为反电动势幅值;Z 为每相电机绕组阻抗。
将计算出的UAN,UBN,UCN代入式(3)得式(9),式(9)中

由上述推导可得,合成空间矢量Uout是半径为并且以三相负载中点N 为参考点的圆形旋转电压矢量。Uref为参考矢量,其大小影响空间基本矢量在各扇区的作用时间,决定了合成矢量的大小。旋转磁场相差电压矢量π/2 相位角,同样是一个矢量圆,也就是说只要通过B,C 两相开关管的切换,使基本矢量在每个扇区进行合理切换就能够为三相电机提供对称电压,从而在电机内部产生圆形旋转磁场。
2.2 导通时间的计算
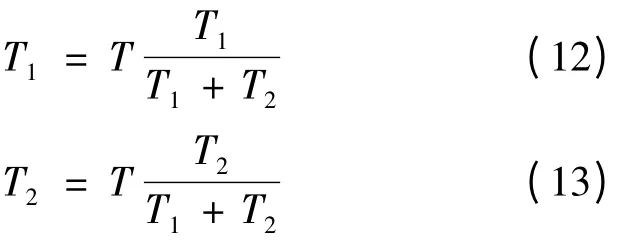
与传统的SPWM 相比,SVPWM 开关次数少、直流电压利用率高、谐波抑制效果好,且易于数字化实现。以第一扇区为例,计算αβ 坐标系内相邻基本电压矢量作用的时间。根据平均等值原理以式(10),(11)中的T1,T2,分别代表U0和U2作用时间:
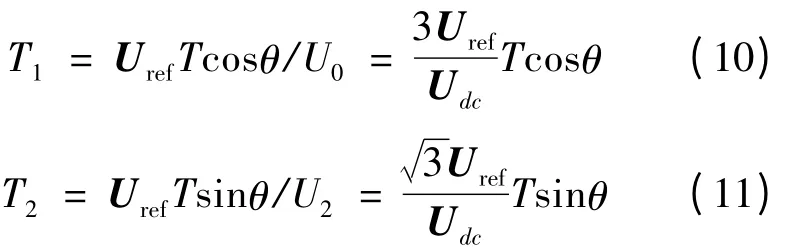
当T1+T2>T 时,利用等比放缩的过调制手段来保证作用时间范围,T 为调制周期。
由于每个扇区内使用的基本空间矢量不同,导通时刻也不同,引入辅助变量Ta,Tb,Tc表示矢量导通时刻:
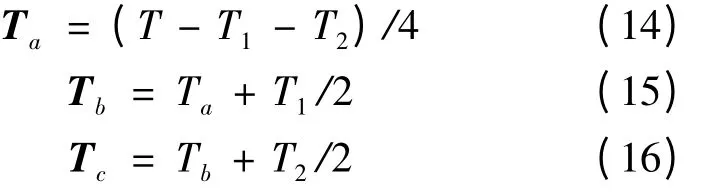
表2 为A 相故障时,B,C 相的各个扇区矢量导通时刻。U0,U3是大小相同、方向相反的矢量,它们共同作用代替传统六开关的零矢量,补充一个周期内矢量合成后多余时间,满足特定空间基本矢量占空比不变。图4 为“七段式”矢量合成法,将同一扇区左右两侧的特定矢量作用时间一分为二,合成对称的PWM 波形。“七段式”合成矢量与给定综合矢量偏差减小,减小磁链的偏差和转矩的脉动。

表2 各扇区实际使用时间转换Tab.2 Conversion of the actual time for each sector
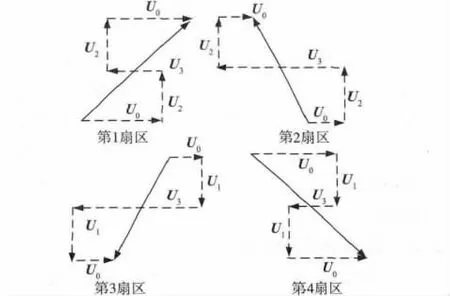
图4 各扇区矢量合成Fig.4 Composite graph of the vector in each sector
空间基本电压矢量的分配原则为:每一调制周期以U0开始并结束;同一桥臂上开关器件的开关状态只改变两次。扇区I ~IV 内的“七段式”四开关SVPWM 波形如图5 所示。对应的电压矢量合成轨迹为图3 虚线形成的圆。

图5 各扇区矢量合成波形Fig.5 Oscillogram of the vector in each sector
3 直流电容对电机运行的影响
在故障相被隔离,由直流母线串联电容中点提供电压时,相电流会受直流母线电容电压的影响发生波动。空间基本电压矢量的幅值和相位也会发生变化,这种变化在低频区域特别明显。运用这些空间基本矢量进行合成必然造成三相电压的不对称。使电容电压发生波动的因素主要有如下3 点:(1)故障相对直流电容的充放电;(2)电容值不同;(3)整流电路的充放电。
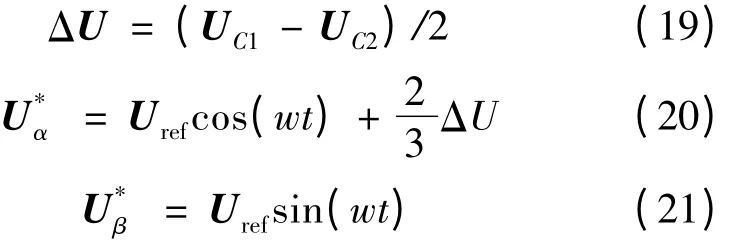
现假设C1,C2两端电压分别为(Udc/2 + ΔU)、(Udc/2 - ΔU),此时的开关状态与各相电压为

通过Clark 变换为

为了减小或消除不平衡电压对逆变器输出电压的影响,只需用两个电压互感器测量电容C1和C2上的电压,可对Uα和Uβ产生的偏差进行补偿:
4 系统建模与仿真波形
在Matlab/Simulink 中搭建三相四开关永磁同步电机矢量控制仿真平台,并进行观察,其中PMSM的参数:极对数Pm为4;定子电阻为0.3 Ω;dq 轴电感Ld= Lq= 11.5 mH;转子转动惯量4.4 × 10-4kg·m2。施加1.5 N 大小的力矩,随后保持。母线电压220 V,开关频率10 kHz。为考核四开关SVPWM调制,将系统的电流环打开,直轴电流给定为0。
如图6 所示,当电容均压理想的情况下,三相交流电呈比较标准的正弦波。三相对称的正弦基波电流,证明电机能够平稳运行。当在电机的负载为1.5 N 时,转矩具有较小的波动,整体处在可以接受的范围内。由于转速外环与电流内环均存在积分,且电机电枢也可看做电阻与电感的惯性环节,转矩稳定时间稍晚于电流,在初始时刻力矩波动大,最终趋于稳定,符合PMSM 的机械特性(见图7)。
图8 为线性调制情况下电压矢量轨迹,轨迹显示三相四开关SVPWM 调制输出的电压矢量轨迹是一个较为理想的圆形。在进行过母线电容电压补偿后,电压矢量位于空间中点处,有利于电机的平稳运行。

图6 永磁同步电机三相电流Fig.6 Three phase current of the permanent magnet synchronous motor

图7 三相四开关系统转矩波形Fig.7 Torque waveform of the three-phase four-switch system
5 结 语
以三相四开关矢量控制系统作为永磁同步电机三相六开关逆变器功率器件故障的容错系统,为了满足故障处理要求,控制单元的控制策略做了相应变化。文中搭建了永磁同步电机三相四开关矢量控制系统的仿真模型,进行仿真研究。分析导致母线电容电压不平衡的原因,提出一种简单的补偿方式。仿真结果表明三相四开关的SVPWM 矢量控制具有比较稳定的控制特性,该拓扑适用于永磁同步电机故障容错控制。
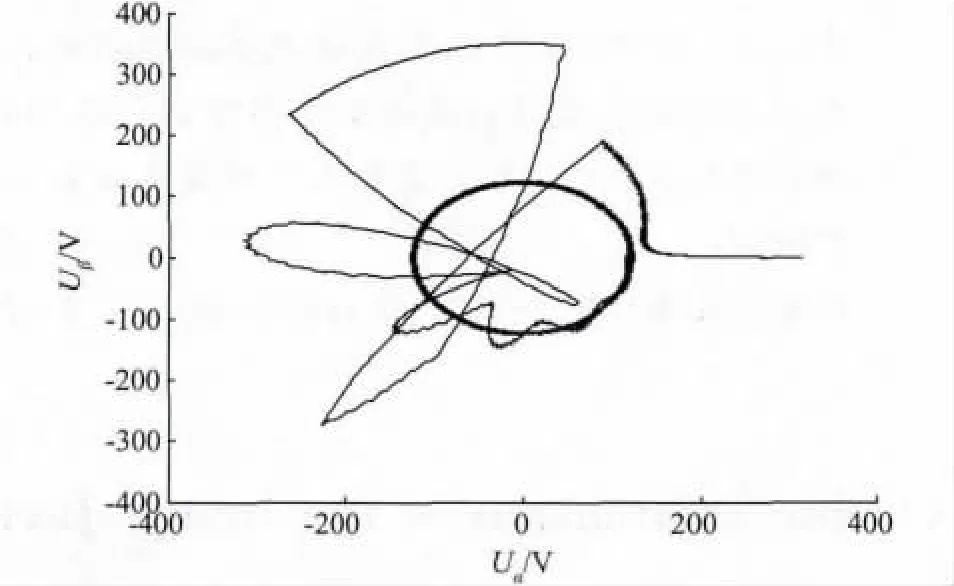
图8 三相四开关SVPWM 电压矢量轨迹Fig.8 Three-phase four-switch SVPWM vector locus
[1]张兰红,胡育文,黄文新.容错型四开关三相变换器异步发电机系统的直接转矩控制研究[J].中国电机工程学报,2005,25(18):140-145.
ZHANG Lanhong,HU Yuwen,HUANG Wenxin. The research of fault-tolerant three-phase four-switch direct torque control for induction generator system[J].Proceedings of the CSEE,2005,25(18):140-145.(in Chinese)
[2]赵杰,张艳霞,宣文博,等.分布式电源中逆变器的故障特征和保护方案[J].电力系统自动化,2012,36(1):51-54.
ZHAO Jie,ZHANG Yanxia,XUAN Wenbo. Fault characteristics and protection scheme in the distributed power inverter[J].Automation of Electric Systems,2012,36(1):51-54.(in Chinese)
[3]RaminosoaT,Gerada C,Othman N.Rating issues in fault tolerant PMSM[C]//IEEE International Electric Machines and Drives Conference.[s.l.]:IEEE,2009:1592-1599.
[4]王瑞,田长安,何勇军.电压源三相四开关逆变器调制策略[J].大功率变流技术,2014,1(12):19-23.
WANG Rui,TIAN Changan,HE Yongjun.Three-phase four-switch modulation strategy for source inverter[J].Power Conversion Technology,2014,1(12):19-23.(in Chinese)
[5]赵克,安群涛,孙力,等.容错逆变器PMSM 无位置传感器控制系统[J].电机与控制学报,2010,14(4):25-29.
ZHAO Ke,AN Quntao,SUN Li. Fault-tolerant inverter sensorless control system[J]. Electric Machines and Control,2010,14(4):25-29.(in Chinese)
[6]陶永华.新型PID 控制及其应用[M].北京:机械工业出版社,2002:1-2.
[7]王斌,王跃,王兆安,等.空间矢量调制的永磁同步电机直接转矩控制[J].电机与控制学报,2010,6(14):45-49.
WANG Bin,WANG Yue,WANG Zhaoan.Direct torque control for Space vector modulation of the permanent magnet synchronous moto[J].Electric Machines and Control,2010,6(14):45-49.(in Chinese)
猜你喜欢
南北桥(2022年2期)2022-05-31
中学生数理化·高一版(2021年11期)2021-09-05
哈尔滨铁道科技(2020年4期)2020-07-22
电脑知识与技术·经验技巧(2017年9期)2018-02-24
西南交通大学学报(2016年4期)2016-06-15
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
计算机技术与发展(2016年10期)2016-02-27
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年14期)2014-04-04