
多传感器目标指示交接动态联盟建模与分析*
2015-01-09 01:33龙文彪夏海宝刘庆林
传感器与微系统 2015年9期
龙文彪, 夏海宝, 杨 涛, 刘庆林, 彭 芳
(空军工程大学 航空航天工程学院,陕西 西安 710038)
多传感器目标指示交接动态联盟建模与分析*
龙文彪, 夏海宝, 杨 涛, 刘庆林, 彭 芳
(空军工程大学 航空航天工程学院,陕西 西安 710038)
为明确目标指示传感器的指示对象,传感器管理需要对能够发生指示交接的传感器组合进行预先组织与规划。在充分考虑预警机各传感器间的差异、引导概率及指示交接代价的前提下,引入动态联盟,建立了多传感器指示交接动态联盟模型,通过限定传感器的指示对象,确保指示交接任务的有序执行。最后,针对几种预警机传感器目标指示交接的典型应用场景,利用改进型粒子群优化(PSO)算法对模型求解,仿真验证了模型的合理性和有效性。
传感器管理; 目标指示交接; 传感器规划; 动态联盟; 综合探测概率
0 引 言
机载平台上搭载的传感器种类繁多,功能各异,同时衍生出大量量测信息冗余,为提高资源的有效利用和综合探测效能,传感器之间的协作是一种有效解决方式,而预先规划传感器指示与被指示的顺序是传感器协作获利的前提。
针对规划传感器组合问题,文献[1]提出了一种针对多目标连续、高综合探测效率问题的多传感器交叉提示多目标探测动态联盟机制,但是传感器类型不明,不适合预警机的实际特点。文献[2]针对战斗机作战要求,提出利用数据链、电子战系统、红外搜索跟踪雷达引导雷达参数的优化,提高雷达的探测距离。文献[3]针对无线传感器网络,利用遗传算法设计动态联盟过程,并进行求解。文献[4]提出一种针对无线传感器网络的基于离散粒子群优化(PSO)的目标分配算法,减少了网络能耗并实现了负载均衡。文献[5]针对大规模无线传感器网络中目标追踪问题,引入联盟覆盖范围和休眠盟员概念,消弱了传感器网络中节点的冗余和能量消耗,并提出一种更新机制确保跟踪目标的连续性。但是这些模型大多针对分布式传感器网络特点,从通信带宽,节点密度等方面给出目标优化函数,对预警机的针对性不足,无法应用在预警机传感器的指示交接问题上。
本文综合考虑多种因素,针对预警机上的相控阵雷达、电子战系统、通信侦察、红外搜索跟踪系统的目标指示交接,建立了预警机多传感器目标指示交接动态联盟模型,并利用改进型PSO算法对其求解。
1 基于动态联盟的通用传感器管理模型
基于动态联盟的通用传感器管理模型主要用于无线传感器网络的传感器资源配置。文献[1]阐述了其组建步骤。
现假设传感器动态联盟模型矩阵为
(1)
其中,T,N分别表示任务数和传感器数,xit为二值函数
(2)
矩阵R中第t列非零元素的集合为传感器联盟Φt,盟员的选择受综合探测概率、目标覆盖、传感器资源限制等因素影响[6]。
1)多传感器综合探测概率
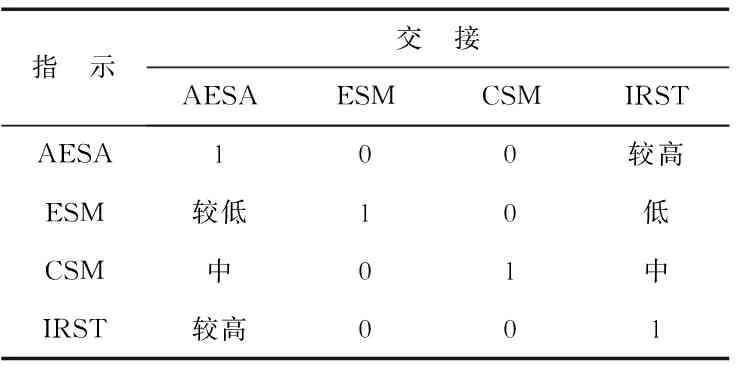
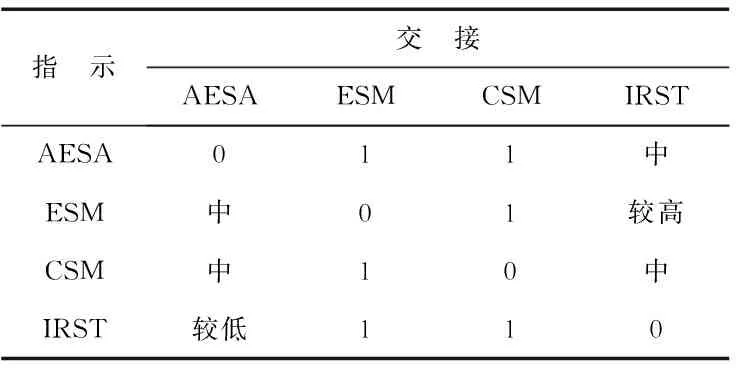
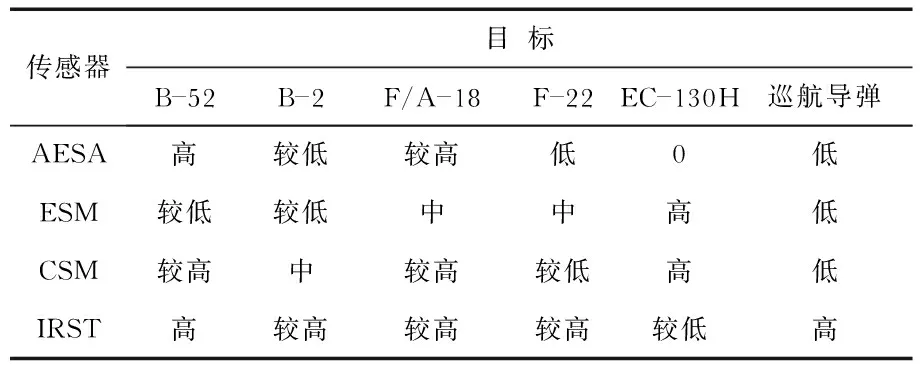
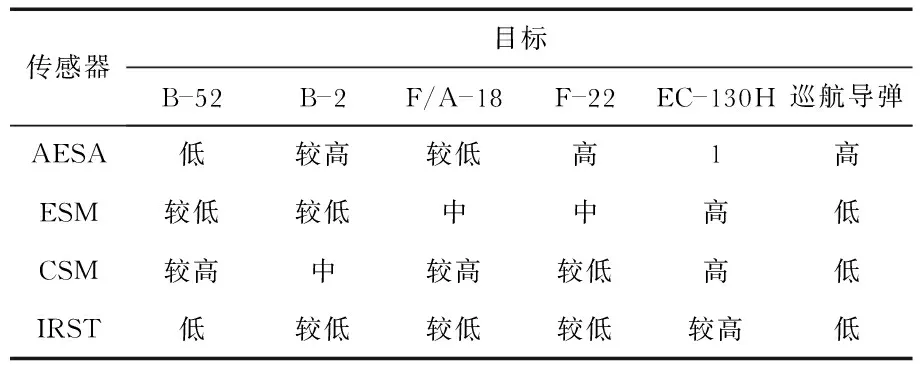
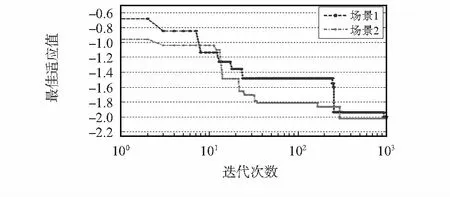
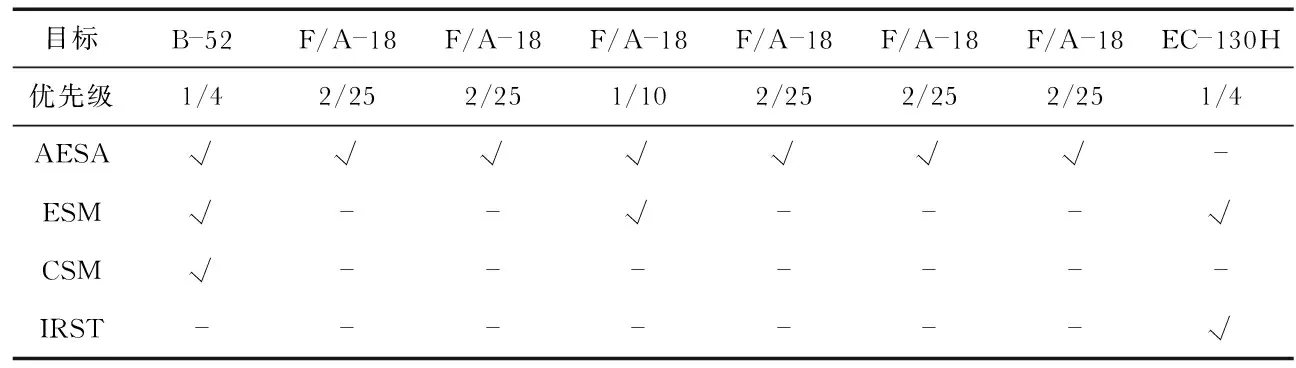
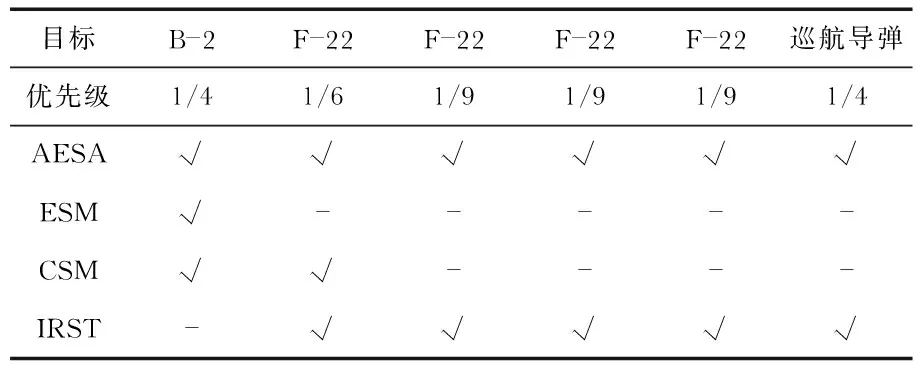
假设传感器i对目标t的探测概率表示为Pdit(0 Pt=1-(1-Pd1t)x1t(1-Pd2t)x2t…(1-Pdit)xit… (1-PdNt)xNt. (3) 2)目标覆盖 假设传感器联盟Φt中的传感器个数Mt,目标覆盖要求Mt需满足 (4) 3)传感器资源限制 假设传感器i能同时处理Qi个任务,则在某一时刻需满足如下不等式 (5) 2.1 预警机多传感器目标指示交接的特殊性 预警机作为一个综合的多传感器平台,相对于分布式传感器网络中的多传感器目标指示与交接问题,其特殊性主要在于: 1)传感器分布集中:配置在同一平台,传感器间的相对位置可以忽略。 2)传感器数目相对不足。 3)单个传感器的智能化程度高:每个传感器包含多种工作模式,并且都能以不同方式实现对目标的侧向或定位。 4)传感器间差异较大:AESA属于有源传感器,ESM,CSM与IRST属于无源传感器,它们在工作原理、量测维度、量测精度、数据率、抗干扰能力、适用场景等方面都存在很大差别。 5)载机平台速度不高、机动性不强:传感器的运动可以认为是匀速运动,不进行滚转等高机动动作,传感器对目标的方位、俯仰短时内不会发生大的变化,目标探测可认为是等探测概率事件。 上述差异决定了分布式无线传感器网络中的动态联盟模型无法解决预警机多传感器目标指示交接问题。 利用这种差异性,可从以下几个方面优化传感器联盟建立过程中的目标函数。 1)传感器间的引导概率 引导概率用于量化传感器间对目标的指示交接能力。引导概率与目标指示传感器的状态估计精度、被引导传感器的视域、搜索能力以及指示交接过程中由于目标相对运动产生的方位角偏差等因素有关。此外,对于不同的传感器组合,其引导概率的影响因素也存在差异。 表1 引导概率 Tab 1 Cueing probability 指 示交 接AESAESMCSMIRSTAESA100较高ESM较低10低CSM中01中IRST较高001 2)指示交接过程的时间代价 指示交接过程的时间代价取决于指示信息精度和被引导传感器的探测能力,包括被引导传感器从收到目标指示信息到确认截获目标所用的时间、传感器与融合中心信息交换的时延两部分。 四种传感器间的目标指示交接的归一化时间代价Ctime如表2。 表2 归一化时间代价 Tab 2 Normalized time cost 指 示交 接AESAESMCSMIRSTAESA011中ESM中01较高CSM中10中IRST较低110 3)传感器探测概率 预警机传感器对不同目标的探测能力存在较大差异,例如:AESA对非隐身目标的发现距离远大于对隐身目标、巡航导弹发现距离;ESM和CSM只能在目标辐射源开机的情况下进行侧向与定位;IRST的探测能力会受目标的飞行速度、姿态、航向、高度等因素影响,因此,需要通过定义探测概率量化各传感器对目标的探测能力。 在分层的基础上并规定雷达对干扰机的探测能力为0,传感器目标对六种典型目标的探测概率Pd如表3。 表3 探测概率 Tab 3 Detection probability 传感器目标B—52B—2F/A—18F—22EC—130H巡航导弹AESA高较低较高低0低ESM较低较低中中高低CSM较高中较高较低高低IRST高较高较高较高较低高 4)指示交接过程的传感器资源代价 传感器资源代价用于量化被引导传感器在执行任务中对自身模式、功率、孔径等资源的消耗。传感器的资源代价通常与探测目标的类型有关,被引导传感器的探测能力决定其搜索截获目标时的资源消耗。 2.2 机载多传感器目标指示交接动态联盟建模 假定只考虑常规飞机、隐身飞机、电子战飞机、巡航导弹这四类典型目标,规定雷达对电子战飞机的归一化资源消耗为1,各传感器探测六种典型目标时的归一化资源代价Cresourse如表4所示。 表4 归一化资源代价 Tab 4 Normalized resource cost 传感器目标B—52B—2F/A—18F—22EC—130H巡航导弹AESA低较高较低高1高ESM较低较低中中高低CSM较高中较高较低高低IRST低较低较低较低较高低 在上述通用模型的基础上,从以下两方面重新定义优化目标函数并建立模型: 1)指示交接中的多传感器综合探测概率 (6) 对上式等号两边取对数得 (7) 2)指示交接代价 (8) 其中,α和β(β=1-α)分别为时间代价和传感器资源代价的权重,考虑到指示交接过程的时间紧迫性,规定α>β。 3)传感器数目 Φt中所包含传感器的总个数Rt表示为 (9) 由此预警机多传感器目标指示交接动态联盟模型为: 目标函数 (10) 其中,wt为目标t的优先级。 约束条件 (11) PSO算法在迭代后期容易陷入局部最优而导致算法搜索效率大幅下降[10]。为提高算法的全局收敛能力,文献[11]提出粒子变异思想,使基本PSO算法适应于离散问题,但是需要明确变异的时机。 利用粒子相似度、丰富度可以量化描述粒子群的多样性,通过全程监控相似度和丰富度的值可以确定粒子变异时机,并在满足变异要求时进行变异操作,使粒子多样性始终维持在一个较高的水平,从而提高算法的全局收敛能力[1]。 算法流程如图1所示。 图1 算法执行流程图 算法参数设置如下:每个粒子是长4N(N代表目标数)的“0-1”向量,粒子个数为100,算法迭代1 000次,粒子的个体丰富度门限为0.3,全局丰富度门限为0.45,时间消耗权重α=0.8、资源消耗权重β=0.2。PSO算法的适应度函数为 (12) 归一化时间代价矩阵Ctime表示为 场景1预警机探测由一架B—52、六架F/A—18和一架EC—130H组成的常规目标突防编队。各传感器对目标的探测概率矩阵Pd定义为 Pd(4×8)= 传感器探测目标时的归一化资源代价矩阵Cresourse定义为 目标优先级权重向量W定义为 W=[1/4,2/25,2/25,1/10,2/25,2/25,2/25,1/4]. 场景2预警机探测由一架B—2、四架F—22组成的隐身编队目标以及一枚巡航导弹目标。传感器对目标的探测概率矩阵定义为 Pd(4×6)= 传感器探测目标时的归一化资源代价矩阵Cresoures定义为 目标优先级权重向量W定义为 W=[1/4,1/6,1/9,1/9,1/9,1/4]. 每种场景下算法的收敛情况如图2所示。可以看出:粒子的最佳适应值随算法的迭代逐渐降低,说明针对离散最优化问题的改进型PSO算法在每种场景下都能取得较好的收敛效果。图3是每种仿真场景下对粒子全局丰富度的统计,可以看出:变异操作能使粒子丰富度始终维持在较高的水平,从而解决了PSO算法容易陷入早熟的问题。表明改进型PSO算法在各仿真场景下都有较高的搜索效率,能够有效对模型进行求解。 图2 算法收敛情况 图3 粒子丰富度统计 表5、表6分别是在场景1和场景2下模型输出每个目标对应的传感器联盟组合,其中,“√”表示传感器属于事件的动态联盟组合。从表5可知,对于重点目标B—52的探测由ESM和CSM向雷达进行目标指示;对于电子战飞机的探测由ESM向IRST进行目标指示;对于高优先级的常规目标由ESM向雷达做出目标指示;对于低优先级的常规目标通常不考虑指示交接需求。 表5 场景1下目标指示交接动态联盟 Tab 5 Dynamic coalition of target cueing-handoff under scene 1 目标B—52F/A—18F/A—18F/A—18F/A—18F/A—18F/A—18EC—130H优先级1/42/252/251/102/252/252/251/4AESA√√√√√√√-ESM√--√---√CSM√-------IRST-------√ 从表6可知:对于重点目标B—2由ESM和CSM对雷达做出目标指示;对于巡航导弹由IRST向雷达做出目标指示;对于隐身目标除了利用IRST指示雷达外,当优先级较高时还存CSM指示IRST的情况。 表6 场景2下目标指示交接动态联盟 Tab 6 Dynamic coalition of target cueing-handoff under scene 2 目标B—2F—22F—22F—22F—22巡航导弹优先级1/41/61/91/91/91/4AESA√√√√√√ESM√-----CSM√√----IRST-√√√√√ 本文在深入分析预警平台传感器特点的基础上,从传感器间的引导概率、指示交接时间代价、资源代价等方面重新定义了模型优化的目标函数,建立了预警机多传感器目标指示交接动态联盟模型,并在两种典型的作战场景下通过改进的PSO算法对模型进行了仿真验证,求解出了预警机在不同场景下发生指示交接的传感器组合,解决了指示交接任务能够有序执行的问题。 [1] 樊 浩,黄树彩,高凤美,等.多传感器交叉提示多目标探测动态联盟技术研究[J].宇航学报,2001,32(11):2380-2386. [2] 路志伟,李 明,季晓光.基于传感器协同技术的雷达搜索空域研究[J].航空计算技术,2006,36(5):5-8. [3] 张 石,张 哲,朱吉昌.基于遗传算法的传感器网络动态联盟研究[J].计算机科学,2008,35(4):20-22. [4] 陈国龙,郭文忠,陈羽中.无线传感器网络任务分配动态联盟模型与算法研究[J].通信学报,2009(11):48-55. [5] 陈建霞,于海滨.一种面向无线传感器网络协同任务分配的动态联盟更新机制[J].传感技术学报,2009,2(4):499-504. [6] 马小平,王鸿彦,徐立中.多传感器管理研究及其应用[J].测试技术学报,2004(1):192-200. [7] Bhaskar K,Stephen W,Ramon B.On the complexity of distributed self-configuration in wireless networks[J].Kluwer Journal on Telecommunication Systems,Special Issue on Wireless Networks and Mobile Computing,2003,22(1):201-211. [8] Zheng D,Gen M,Cheng R.Multiobjective optimization using genetic algorithm[J].Engineering Valuation and Cost Analysis,1998,2:303-310. [9] 刘 梅,李海浩.无线传感器网络空中目标跟踪任务分配技术的研究[J].宇航学报,2007,24(4):960-965. [10] 高 璇.粒子群算法优化及其在图像检索中的应用研究[D].西安:西安电子科技大学,2003. [11] David C,Deborah E,Mani S.Overview of sensor network[J].IEEE Computer,2004,37(8):41-49. Modeling and analysis on target cueing-handoff using multi-sensor based on dynamic coalition* LONG Wen-biao, XIA Hai-bao, YANG Tao, LIU Qing-lin, PENG Fang (School of Aeronautics and Astronautics Engineering,Air Force Engineering University, Xi’an 710038,China) In order to indicate the sensors’ referents,it is necessary to manage the combination of sensors before cueing-handoff.Establish a multi-sensor target designation handoff dynamic alliance model and prescribes a limit to the referents,in order to make sure the orderly execution under the full consideration of differences of four active sensors,cueing probability and the costs of cueing-handoff.Lastly,by improved particle swarm optimization(PSO) algorithm to solve model,and the simulation proves rationality and effectiveness of the model. sensor management; target cueing-handoff;sensor scheme; dynamic coalition,integrated detection probability 2015—01—13 航空科学基金资助项目(20145596025) 10.13873/J.1000—9787(2015)09—0030—05 TP 212 A 1000—9787(2015)09—0030—05 龙文彪(1989-),男,湖南涟源人,硕士研究生,研究方向为雷达信号处理、传感器管理。2 预警机多传感器目标指示交接动态联盟建模



3 基于改进型PSO的粒子多样性的维持

4 目标指示交接动态联盟仿真验证与结果分析




5 结 论
猜你喜欢
昆明医科大学学报(2022年1期)2022-02-28
小哥白尼(军事科学)(2021年5期)2021-08-30
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
海峡姐妹(2017年12期)2018-01-31
浙江工业大学学报(2017年5期)2018-01-22
作文与考试·初中版(2017年12期)2017-04-19
中学生(2015年12期)2015-03-01
舰船科学技术(2013年12期)2013-08-15
作文大王·中高年级(2008年12期)2008-12-19
