
基于机载MASTER数据的果园叶面积指数遥感反演
2015-01-04 06:19王文君盛世杰张雪红
自然资源遥感 2015年2期
陈 健,王文君,盛世杰,张雪红
(南京信息工程大学地理与遥感学院,南京 210044)
0 引言
叶面积指数(leaf area index,LAI)表征植被叶片的疏密程度和冠层结构特征,对植被的生物物理过程(如光合作用、呼吸、蒸腾、碳循环和降水截获等)有着重要影响[1]。LAI的遥感反演一直以来是植被遥感领域的重要内容。已有研究大多数围绕NOAA-AVHRR,MODIS,TM/ETM+和 SPOT/VEGETATION等数据,针对森林、作物、草地及芦苇等地物进行LAI反演[2-7],这些研究多是基于卫星遥感数据,空间分辨率往往较低,利用机载光学遥感数据反演高空间分辨率LAI的研究比较有限。
已有利用航空遥感数据反演LAI的研究多是利用机载数据提供的多角度信息,如周宇宇等[8]利用机载多角度多光谱成像仪系统(airbornemulti-angle TIR/VNIR imaging system,AMTIS)数据对北京市顺义地区的小麦进行LAI反演,研究表明,与传统的航空遥感数据相比,多角度数据可以提供更加丰富的信息。Simic等[9]利用多角度轻便机载光谱成像仪(compact airborne spectrographic imager,CASI)数据,反演了加拿大安大略北部森林样地的集聚指数和LAI。Manninen等[10]利用机载宽视场光学图像进行了芬兰北方针叶林 LAI的反演。Asmat等[11]利用多条航线的遥感数据进行了英国阿道夫东南地区样地LAI的反演。以上研究均表明,航空遥感数据一般具有较高的空间分辨率,可以更加有效地与地面实测数据进行比较,减少因尺度问题带来的影响;但同时航空遥感数据提供的多角度或宽视场数据受到地面二向反射的影响,获取的图像具有非常明显的亮度梯度现象[12-13],这一方面提供了丰富的多角度信息,另一方面也对LAI的反演模型精度造成了一定影响。
美国加利福尼亚州是重要的果树基地,准确获取果树的LAI对监测果树长势,进行果树估产有着重要作用。为了研究亮度梯度对LAI反演的影响,提高果树LAI反演精度,美国空间技术和遥感研究中心(Center for Spatial Technologies and Remote Sensing,CSTARS)开展了一次航空遥感实验,分别沿太阳主平面和垂直太阳主平面获取了2景机载多光谱数据。本文首先研究了这2景图像的亮度梯度现象,在此基础上选取几乎不受亮度梯度影响的沿太阳主平面方向飞行获取的数据,通过建立归一化差值植被指数(normalized difference vegetation index,NDVI)、归一化差值红外指数(normalized difference infrared index,NDII)和归一化差值水体指数(normalized difference water index,NDWI)3 种指数与实测LAI的回归模型,进行了LAI的反演研究,结果表明NDWI比NDVI和NDII具有更高的拟合度和更小的均方根误差,更加适合研究区LAI的遥感反演。该研究的结果可以丰富LAI反演理论,为地面实测和卫星遥感提供中尺度的LAI,也可为LAI的尺度问题研究提供理论和数据支持。
1 研究区概况与采样方案
以美国加利福尼亚州西基恩郡果园为研究区,该区中心地理坐标为 W119°40'2.6″,N35°29'45″,面积约10 km2,包括2个开心果树的地块和6个杏树的地块,这些地块代表了不同的果树年龄、种类和覆盖度等特点的果园。
使用鱼眼镜头进行LAI实测,每个样点代表地面范围约300 m2,对每个样点分别在不同位置拍摄12张鱼眼照片。在室内利用植被冠层半球图像分析系统(hemispheric image analysis system,Hemi-View)软件对鱼眼照片进行处理,得到12个点的LAI,取其平均得到该样点的LAI。为了降低图像纠正和配准带来的误差,每一个样点均位于空间均匀的区域。共实测得到40个样点,采样布置见图1,果园地块信息见表 1[14]。
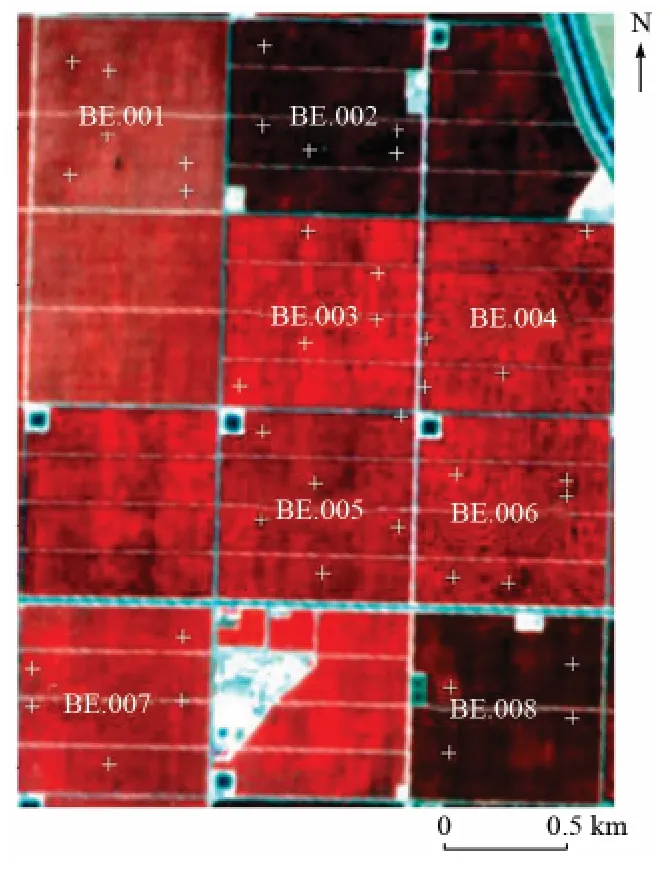
图1 研究区位置和实测数据(BE.001 和 BE.008 为开心果树地块编号,BE.002—BE.007 为杏树地块编号;底图是由机载MASTER数据R(9),G(5),B(2)合成的标准假彩色图像)Fig.1 Study area and sample points
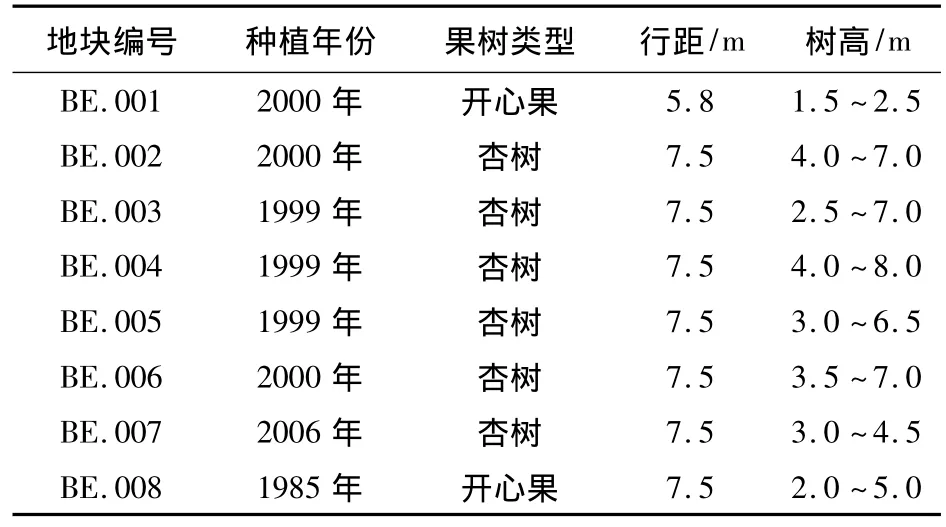
表1 果园地块特性[14]Tab.1 Block characteristics of orchards[14]
2 遥感数据源及其预处理
本文采用机载MODIS/ASTER模拟传感器(MODIS/ASTER airborne simulator,MASTER)数据。MASTER传感器搭载在NASA DC-8飞机上,飞行高度约4 000 m,飞行日期为2011年6月30日,分别沿太阳主平面及垂直太阳主平面2个不同飞行方向进行成像(图2),数据获取时天气晴好。
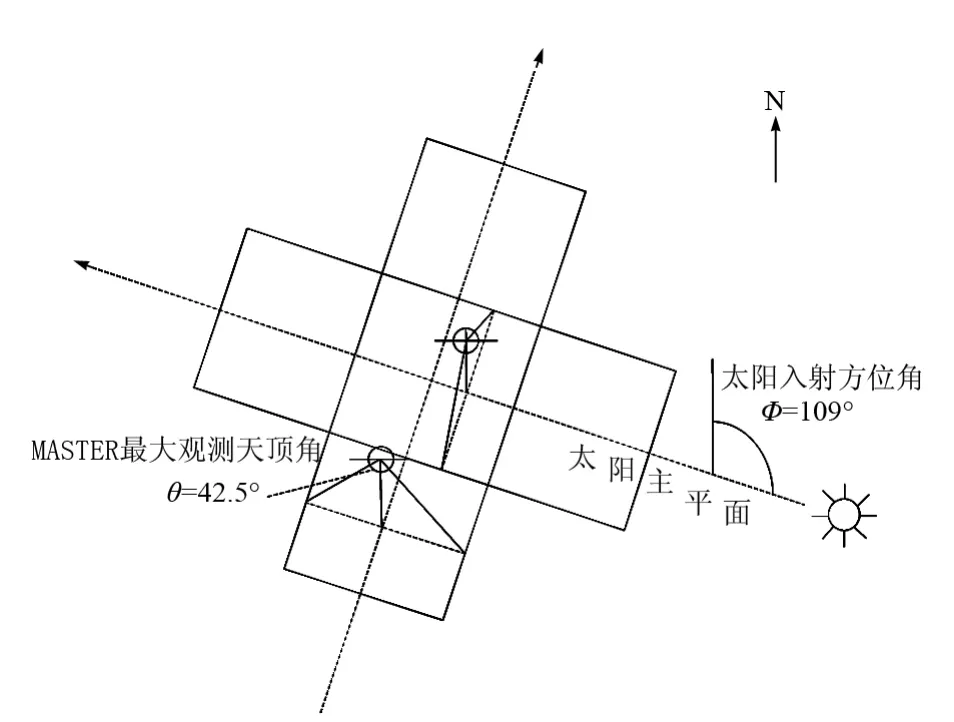
图2 2景不同航向图像成像示意图Fig.2 Schematic diagram of imaging with different heading direction of two images
MASTER为模拟MODIS和ASTER的传感器,共有50个波段,包括25个反射率波段(波谱范围为0.4~2.5μm)和25个热红外波段。表2列出本文中用到的4个MASTER波段的信息[15]。
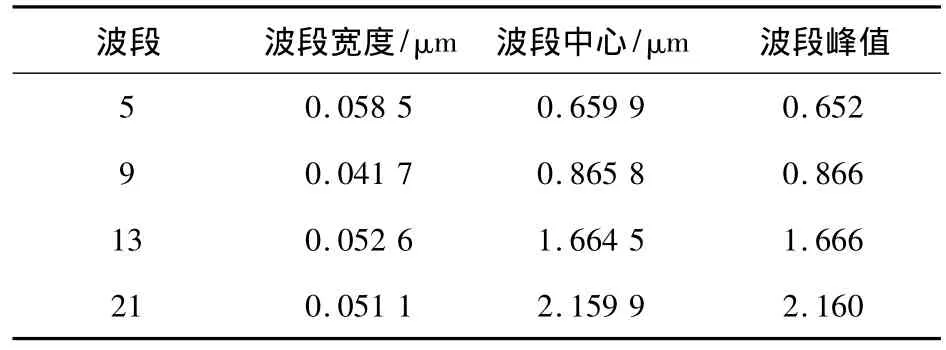
表2 MASTER数据可见光和短波红外波段特性[15]Tab.2 Spectral characteristics of the visible and shortwave infrared bands of MASTER data[15]
利用头文件提供的定标系数进行定标后,使用FLAASH(fast line-of-sight atmospheric analysis of hypercubes)软件对MASTER图像进行大气校正。FLAASH模块中,大气模式为中纬度夏天,气溶胶模式为乡村气溶胶模式,经大气校正得到地表反射率数据。利用数据获取时提供的坐标信息对MASTER图像进行几何纠正,并将空间分辨率重采样成6 m,2景图像的配准精度控制在0.5个像元以内。
飞机飞行高度约4 000 m,成像时最大观测天顶角约42.5°。受太阳照射角度的影响,遥感数据往往存在明显的亮度梯度现象,并且这种现象随着太阳照射角度与飞行方向的相对角度的变化而不同。图3为沿太阳主平面方向(along solar plane,ASP)和垂直太阳主平面方向(perpendicularly to solar plane,PSP)飞行获取的2景MASTER数据的对比。针对这2景不同航向数据,任选一水平剖面,得到近红外波段(NIR)、红波段(RED)和短波红外(SWIR)波段反射率的剖面。
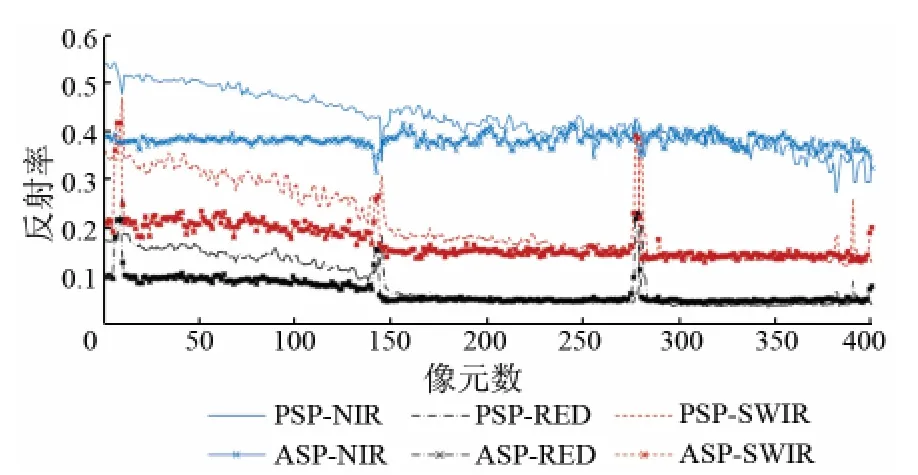
图3 2景不同航向MASTER数据反射率水平剖面比较Fig.3 Comparison between reflectance horizontal profiles from two MASTER images acquired in different heading direction
由图3可以看出,沿PSP方向飞行获取的图像,单个波段均有着明显的变化规律,在热点附近(横坐标左边起第10个像元位置)近红外波段具有最高的反射率(在飞机造成的阴影处反射率稍微低一点);距离热点方向越远,反射率越低,在天底方向开始趋于稳定;红波段和短波红外波段也存在热点现象,但是没有近红外波段明显。沿ASP方向飞行获取的数据,植被反射率变化不大,说明几乎没有受到亮度梯度的影响。红波段、短波红外波段均比近红外波段保留了更多的地块信息,但红波段比短波红外波段的值要小很多,这主要是因为红波段对植被的强烈吸收引起的,这种现象在高覆盖植被区域易造成NDVI偏大、易达到饱和的现象。
根据几何光学模型的原理,由于热点方向具有最高的反射率,而暗点方向具有最低的反射率,因此沿PSP方向飞行获取的数据具有最大的亮度梯度。相反,沿ASP方向飞行获取的数据,平行飞行方向上的像元均具有相同的太阳光照条件和观测角度,因此不具有亮度梯度现象。而垂直于飞行方向同一剖面上的像元,尽管观测角度不一样,但是光照部分和阴影部分比例应保持不变,因此也不存在亮度梯度现象。综上所述,沿太阳主平面飞行方向获取的MASTER数据不存在亮度梯度现象,故选取该数据用于本次LAI的反演。
3 研究方法
植被指数法是遥感反演LAI的常用方法[16-17]。根据对植被光谱特征的分析,本文选择 NDVI,NDII[18]和 NDWI[19]等 3 个指数用于估算 LAI。3 个指数的计算方法分别为
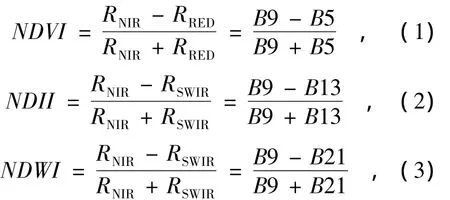
式中:B5,B9,B13和B21分别为MASTER数据的第5,9,13和21波段的反射率;反射率R的下标RED,NIR和SWIR分别为红波段、近红外波段和短波红外波段。Gao等[19]在计算NDWI时,短波红外波段使用的是1.24μm的波段;由于MASTER数据没有这个波段,因此本文计算NDWI时使用的短波红外波段是2.16μm的水分吸收波段。
由于MASTER图像的空间分辨率为6 m,为了正确匹配实测数据和遥感数据,对遥感数据进行重采样和3像元×3像元的均值滤波,即像元的有效代表范围为324 m2,而实测样点代表的范围约为300 m2,因此滤波后二者代表的范围基本匹配。本次研究共有39个有效实测点数据(有1个点接近地块间的道路,图像配准和滤波时混入了道路的反射特征,因此将该点剔除)。将39个实测点分为2组,从8个地块中分别随机挑选出一个样点作为验证数据,剩下的31个实测点用于建立模型。模型的精度验证通过计算均方根误差(root mean squared error,RMSE)来完成。
4 结果与分析
4.1 研究结果
以LAI为自变量,NDVI,NDII和NDWI分别为因变量进行对数回归分析,结果如图4所示。
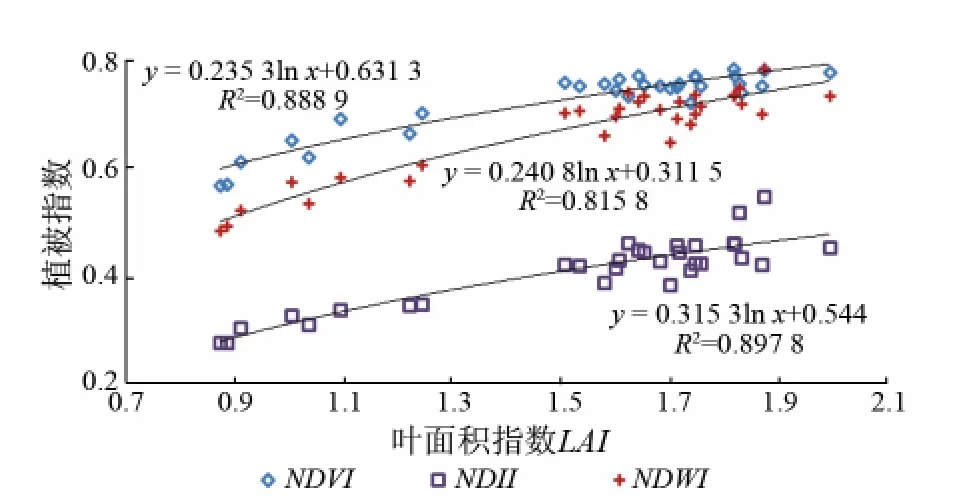
图4 3种LAI反演模型比较Fig.4 Comparison among three LAI retrieval models
由图4可以看出,NDVI,NDII和NDWI与LAI均有较好的拟合效果,拟合度分别为0.888 9,0.815 8和0.897 8。其中,LAI与NDVI和NDWI的拟合度均明显高于与NDII的拟合度,与NDWI的拟合度略高于与NDVI的拟合度。LAI与NDVI的拟合度虽然较高,但在LAI的高值区出现比较明显的饱和现象,即当LAI增加到一定程度时,NDVI植被指数的变化不再敏感;NDWI水体指数仍呈现出随LAI增加而增加的趋势,这可能是因为短波红外为水分吸收谷,植被生长越茂密,吸收越强烈,但是不会很快达到饱和。因此,本文认为NDWI比NDVI更适合于研究区LAI的反演。
4.2 LAI反演精度验证
为了进一步比较3个LAI反演模型,本文利用剩余的8个实测点数据(作为验证数据)计算了均方根误差RMSE(图5)。
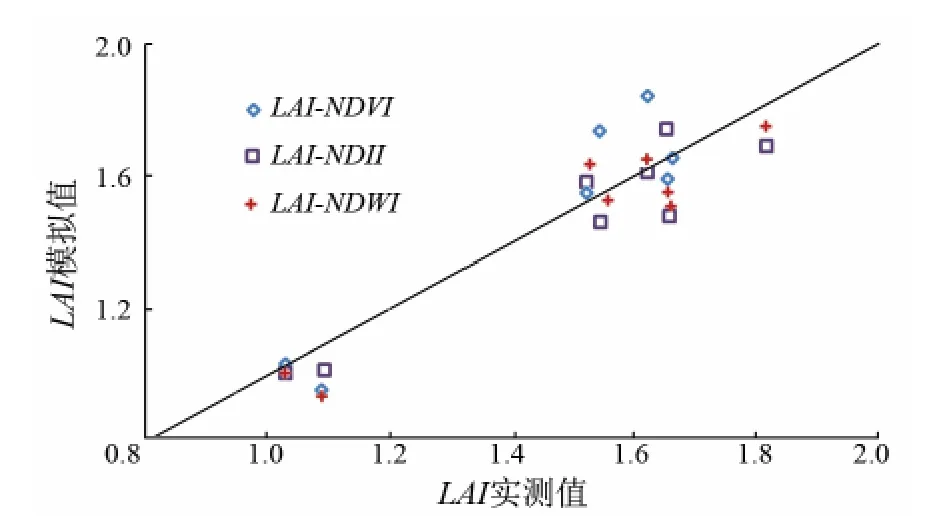
图5 实测LAI与模拟LAI的关系Fig.5 Relationship between measured LAI and simulated LAI
图5中各点均分布在y=x直线周围,用NDVI,NDII和NDWI反演LAI的3种模型的RMSE分别为0.126,0.100 和 0.096,其中基于NDWI指数的反演模型得到的模拟值与实测值具有最好的对应关系。因此,本文最终选取NDWI进行LAI的反演和制图。
4.3 LAI制图与分析
LAI反演时受到的影响因素众多,包括太阳的照射角度、大气、传感器、地形、植被类型及背景土壤等。研究区范围较小,因此太阳的照射天顶角(27.33°~27.43°)和方位角(108.96°~109.03°)变化很小,其影响可忽略不计;航摄的高度约为4 km,因此4 km以上大气的影响不予考虑,并且利用FLAASH模块对MASTER数据进行大气校正,最大程度地减少了大气的影响;研究区地势平坦,地形对反演结果的影响也可忽略不计。本文基于NDWI与LAI的回归模型进行了果园LAI反演和制图(图6)。
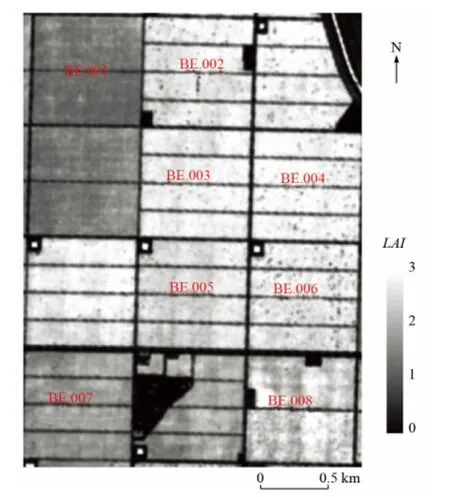
图6 研究区LAI反演图Fig.6 Rretrieval map of LAI in study area
由图6可以看出,LAI反演结果具有明显的地块分布特征。BE.001与BE.008都是开心果树,2个地块LAI的差异主要来自于果树年龄的差异。BE.002和BE.006同为2000年种植的杏树,在图1中这2个地块的差异极大,主要是因为BE.002的土壤水分偏高导致呈现出暗红色的色调;经过反演之后得到这2个地块的LAI非常接近,也说明LAI反演的结果在一定程度上可以去除土壤背景的影响。综上所述,研究区LAI的分布与植被类型、果树年龄具有较好的一致性,而且LAI反演结果具有较高的精度,可以用于进一步的研究。
5 结论
1)由于平行飞行方向剖面的像元均具有相同的太阳光照条件和观测角度,因此沿太阳主平面方向飞行成像的数据不具有亮度梯度现象;垂直飞行方向的剖面像元,尽管观测角度不一样,但是光照部分和阴影部分比例应保持不变。
2)NDVI,NDII和 NDWI与 LAI均有较好的拟合效果,拟合度分别为0.888 9,0.815 8 和0.897 8,反演 LAI的 RMSE 分别为 0.126,0.100 和 0.096。LAI与NDVI和NDWI的拟合度均高于与NDII的拟合度,与NDWI的拟合度略高于与NDVI的拟合度。尽管LAI与NDVI的拟合度也较高,但在LAI高值区出现较明显的饱和现象,因此,NDWI比NDVI更适合于研究区LAI的反演。
3)本文使用沿太阳主平面方向飞行成像的航空数据进行LAI反演,可以有效避免亮度梯度的影响,该研究结果为航空遥感的实验设计提供了一种新思路。若能进一步结合中、低空间分辨率卫星数据(如TM和MODIS)进行研究,则可为不同数据源的LAI尺度对比提供数据基础。若能结合垂直太阳主平面方向飞行的数据同时反演,则可充分利用多角度信息进行LAI的提取,有助于LAI反演精度的提高。
志谢:感谢美国空间技术和遥感研究中心提供MASTER数据和实测LAI数据,感谢加州大学戴维斯分校Susan Ustin教授和南京农业大学程涛教授提供的帮助。
[1] 刘 洋,刘荣高,陈镜明,等.叶面积指数遥感反演研究进展与展望[J].地球信息科学学报,2013,15(3):734-743.Liu Y,Liu R G,Chen JM,etal.Current status and perspectives of leaf area index retrieval from optical remote sensing data[J].Journal of Geo-Information Science,2013,15(3):734-743.
[2] Liu Y,Liu R G,Chen JM.Retrospective retrieval of long-term consistent global leaf area index(1981—2011)from combined AVHRR and MODIS data[J].Journal of Geophysical Research:Biogeo sciences(2005-2012),2012:117(G4).doi:10.1029/2012JG002084.
[3] Myneni R B,Hoffman S,Knyazikhin Y,et al.Global products of vegetation leaf area and fraction absorbed PAR from year one of MODIS data[J].Remote Sensing of Environment,2002,83(1/2):214-231.
[4] Chen JM,Cihlar J.Retrieving leaf area index of boreal conifer forests using Landsat TM images[J].Remote Sensing of Environment,1996,55(2):153-162.
[5] Baret F,Hagolle O,Geiger B,et al.LAI,FAPAR and cover CYCLOPES global products derived from VEGETATION.Part1:Principles of the algorithm[J].Remote Sensing of Environment,2007,110(3):275-286.
[6] Weiss M,Baret F,Garrigues S,et al.LAI and FAPAR CYCLOPES global products derived from VEGETATION.Part2:Validation and comparison with MODIS collection 4 products[J].Remote Sensing of Environment,2007,110(3):317-331.
[7] 陈 健,倪绍祥,李云梅,等.芦苇地叶面积指数的遥感反演[J].国土资源遥感,2005,17(2):20-23.doi:10.6046/gtzyyg.2005.02.05.Chen J,Ni SX,Li YM,etal.Remote sensing LAI retrieval of reed marsh[J].Remote Sensing for Land and Resources,2005,17(2):20-23.doi:10.6046/gtzyyg.2005.02.05.
[8] 周宇宇,唐世浩,朱启疆,等.基于新型机载多角度传感器AMTIS的LAI反演[J].国土资源遥感,2003,15(4):9-12.doi:10.6046/gtzyyg.2003.04.03.Zhou Y Y,Tang SH,Zhu Q J,etal.LAI retrieval based on the new airbornemulti-angle sensor AMTIS[J].Remote Sensing for Land and Resources,2003,15(4):9-12.doi:10.6046/gtzyyg.2003.04.03.
[9] Simic A,Chen JM,Free mantle JR,et al.Improving clumping and LAI algorithms based on multiangle airborne imagery and ground measurements[J].IEEE Transactions on Geoscience and Remote Sensing,2009,48(4):1742-1759.
[10] Manninen T,Korhonen L,Voipio P,et al.Leaf area index(LAI)estimation of boreal forest using wide optics airborne winter photos[J].Remote Sensing,2009,1(4):1380-1394.
[11] Asmat A,Milton E J,Atkinson PM.Empirical correction of multiple flight line hyper spectral aerial image mosaics[J].Remote Sensing of Environment,2011,115(10):2664-2673.
[12] Kennedy R E,Cohen W B,Takao G.Empirical methods to compensate for a view-angle-dependent brightness gradient in AVIRIS imagery[J].Remote Sensing of Environment,1997,62(3):277-291.
[13] Schiefer S,Hostert P,Damm A.Correcting brightness gradients in hyper spectral data from urban areas[J].Remote Sensing of Environment,2006,101(1):25-37.
[14] Cheng T,Riano D,Koltunov A,et al.Detection of diurnal variation in orchard canopy water content using MODIS/ASTER airborne simulator(MASTER)data[J].Remote Sensing of Environment,2013,132:1-12.
[15] Hook S J,Myers J,Thome K J,et al.The MODIS/ASTER airborne simulator(MASTER):A new instrument for earth science studies[J].Remote Sensing of Environment,2001,76(1):93-102.
[16] 侯学会,牛 铮,黄 妮,等.小麦生物量和真实叶面积指数的高光谱遥感估算模型[J].国土资源遥感,2012,24(4):30-35.doi:10.6046/gtzyyg.2012.04.06.Hou X H,Niu Z,Huang N,et al.The hyper spectral remote sensing estimation models of total biomass and true LAIof wheat[J].Remote Sensing for Land and Resources,2012,24(4):30-35.doi:10.6046/gtzyyg.2012.04.06.
[17] 傅银贞,汪小钦,江 洪.马尾松LAI与植被指数的相关性研究[J].国土资源遥感,2010,22(3):41-46.doi:10.6046/gtzyyg.2010.03.09.Fu Y Z,Wang X Q,Jiang H.The correlation between LAIand vegetation index of masson pine[J].Remote Sensing for Land and Resources,2010,22(3):41-46.doi:10.6046/gtzyyg.2010.03.09.
[18] Hardisky M A,Klemas V,Smart R M.The influence of soil salinity,growth form and leaf moisture on the spectral radiance of spartina alterniflora canopies[J].Photogrammetric Engineering and Remote Sensing,1983,49:77-84.
[19] Gao B C.NDWI:A normalized difference water index for remote sensing of vegetation liquid water from space[J].Remote Sensing of Environment,1996,58(3):257-266.
猜你喜欢
冶金能源(2022年5期)2022-10-14
——缺陷度的算法研究
条码与信息系统(2022年3期)2022-07-05
汽车电器(2022年6期)2022-07-02
航天返回与遥感(2022年2期)2022-05-12
家庭影院技术(2021年6期)2021-07-28
摄影之友(影像视觉)(2019年3期)2019-03-30
汽车文摘(2018年2期)2018-11-27
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
电子制作(2017年8期)2017-06-05
